Изобретение относится к робототехнике, а именно к схватам манипуляторов, и может использоваться в конструкциях промышленных роботов и манипуляторов.
Цель изобретения - повышение надежности работы пальца схвата манипулятора.
На чертеже схематически изображен предлагаемый палец схвата манипулятора.
Палец схвата манипулятора содержит послеДЬ.ёательно шарнирно соединенные между собой звенья 1, выполненные в виде полых корпусов. :В каждом полом корпусе в плоскости, параллельной осям 2 шарнирных соединений, например петлевых шарнирных соединений звеньев, выполнен сквозной паз 3. Привод относительного перемещения звеньев 1 включает шарнирный параллелограмм для каждого звена, составленный из стержней 4 - 7, шарнирно связанных осями 8-11. Два смежных стержня 6 и 7 параллелограмма, наиболее удаленные относительно осей 2 шарнирных соединений звеньев 1, шарнирно соединены соответственно с аналогичными стержнями параллелограммов предыдущего и последующего звеньев 1 при помощи оси 12. Ось 10 шарнира соединения стержней 6 и 7 между собой свободно размещена в сквозном пазу 3 корпуса, а ось 1 I противолежащего шарнира параллелограмма жестко закреплена на корпусе 1.
Палец схвата манипулятора работает следуюпа,им образом.
При воздействии стержня 7 на ось 12 движение передается стержню 6 последующего шарнирного параллелограмма, который приводит в движение ось 10. Последняя движется по сквозному пазу 3 корпуса 1 и поворачивает корпуса 1, связанные ося- .ми 2 петлевых шарнирных соединений, относительно друг друга на уголос.
Формула изобретения
Палец схвата манипулятора, содержащий последовательно шарнирно соединенные между собой звенья, выполненные в виде полых корпусов, и привод их относительно
перемещения, отличающийся тем, что, с целью повышения надежности, в полом корпусе каждого звена в плоскости, параллельной осям шарнирных соединений звеньев, выполнен сквозной паз, а привод относительного перемещения звеньев включает шарнирный параллелограм.м для каждого звена, при этом два смежных стержня этого параллелограмма, наиболее удаленные относительно осей шарнирных соединений звеньев, шарнирно соединены соответственно с аналогичными стержнями параллелогра.ммов предыдущего и последующего звеньев, приче.м ось шарнира соединения этих стержней между собой размещена в сквозном пазу, а ось противолежащего шарнира параллелограмма жестко закреплена на корпусе.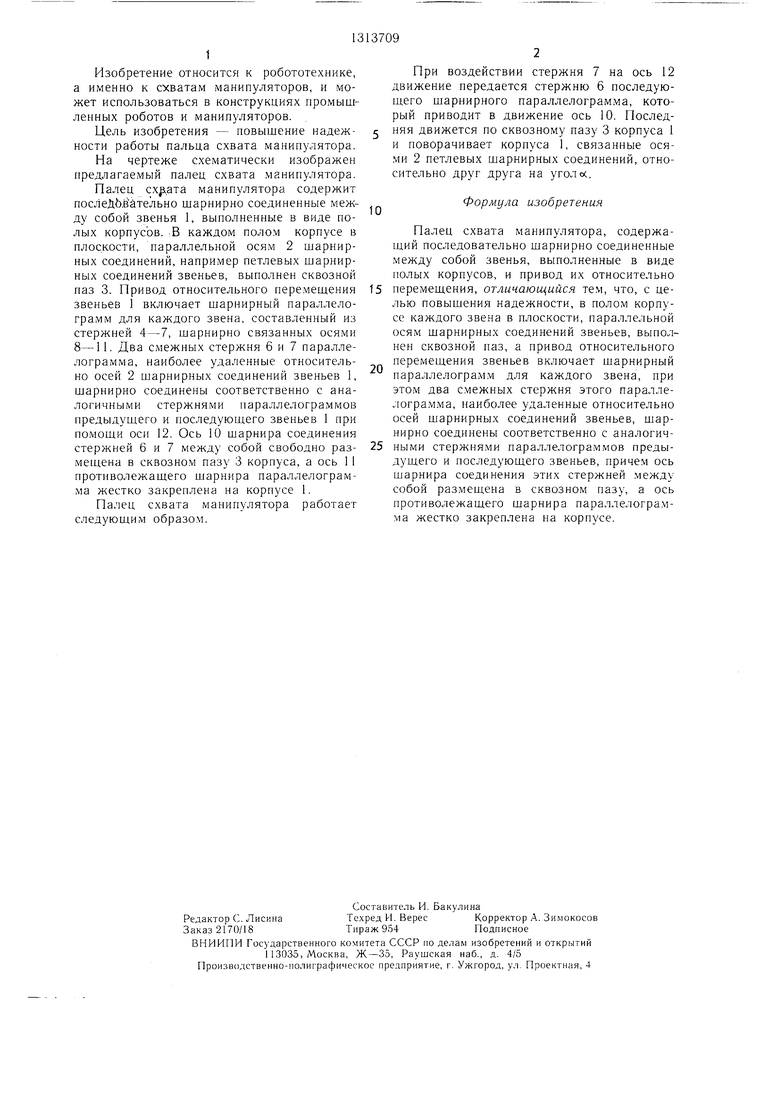
| название | год | авторы | номер документа |
|---|---|---|---|
| МОДУЛЬНЫЙ МАНИПУЛЯЦИОННЫЙ РОБОТ, ПРЕДНАЗНАЧЕННЫЙ ДЛЯ ИСПОЛЬЗОВАНИЯ В ОБРАЗОВАТЕЛЬНЫХ ЦЕЛЯХ | 2023 |
|
RU2806952C1 |
| Рука манипулятора | 1985 |
|
SU1291382A1 |
| Рука манипулятора | 1979 |
|
SU841963A1 |
| Манипулятор | 1990 |
|
SU1722807A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2179920C2 |
| Схват манипулятора | 1986 |
|
SU1351778A2 |
| Робот-погрузчик сеток с овощами | 2021 |
|
RU2763624C1 |
| Исполнительное устройство манипулятора | 1986 |
|
SU1366383A2 |
| Антропоморфный манипулятор | 1989 |
|
SU1646850A1 |
| Привод захвата | 1979 |
|
SU870108A1 |
Изобретение относится к робототехнике, а именно к схватам манипуляторов, и может использоваться в конструкциях про- .мышленных роботов и манипуляторов. 1Де- лью изобретения является повышение надежности работы пальца схвата манипулятора. Палец схвата манипулятора содержит последовательно шарнирно соединенные между 10 собой звенья 1, выполненные в виде полых корпусов, в которых в плоскости, паралле.1ь- ной осям 2 шарнирных соединений звеньев, выполнен сквозной паз 3. Привод относительного пере.мешения звеньев 1 включает шарнирный параллелограмм для каждого звена, составленный из стержней 4-7, шарнирно связанных осями 8, 9. 10 и И. Два смежных стержня 6 и 7 параллелограмма шарнирно соединены соответственно с аналогичными стержнями параллелограм.мов предыдущего и последуюшего звеньев I посредством оси 12. Ось 10 шарнира соединения стержней 6 и 7 между собой свободно размешена в сквозном пазу 3 корпуса, а ось 11 противолежашего шарнира параллелограмма жестко закреплена на корпусе. I ил. (О (Л с: со со о со
| СПОСОБ РЕГУЛИРОВАНИЯ ПРОКАТНОЙ КЛЕТИ | 2006 |
|
RU2345856C2 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
