(54) ЛИНИЯ ДЛЯ ОБРАБОТКИ ЕМКОСТИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Устройство для подачи брусков под пакет листов | 1990 |
|
SU1819714A1 |
| Подвижная опалубка | 1980 |
|
SU927932A1 |
| Автомат для тепловой сборки | 1976 |
|
SU560729A1 |
| Вакууматор | 1981 |
|
SU1020443A1 |
| Устройство для выгрузки сыпучего материала из емкости | 1990 |
|
SU1766803A1 |
| Рулевое управление трактора | 1984 |
|
SU1221002A1 |
| Мульдозавалочная машина | 1981 |
|
SU1043101A1 |
| Тележка | 1978 |
|
SU748114A1 |
| ПОЛУАВТОМАТ ДЛЯ ФРЕЗЕРОВКИ СЕКРЕТОВ КЛЮЧЕЙ ДИСКОВОГО ЗАМКА | 2001 |
|
RU2207225C2 |
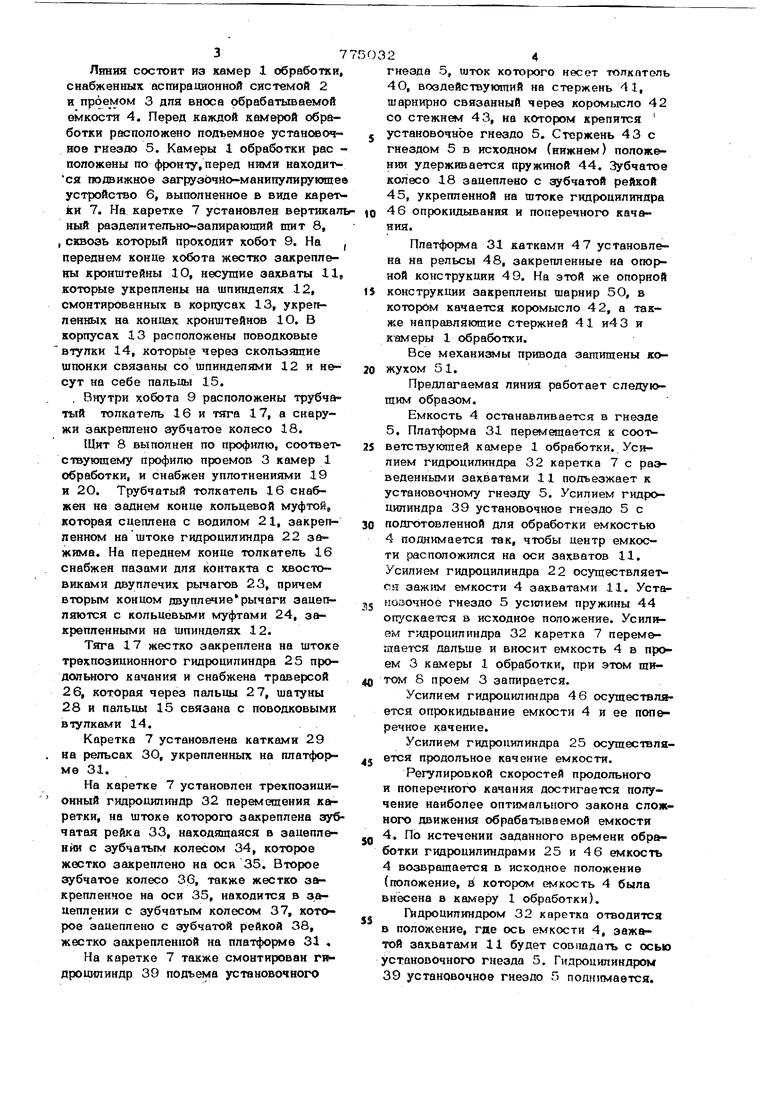
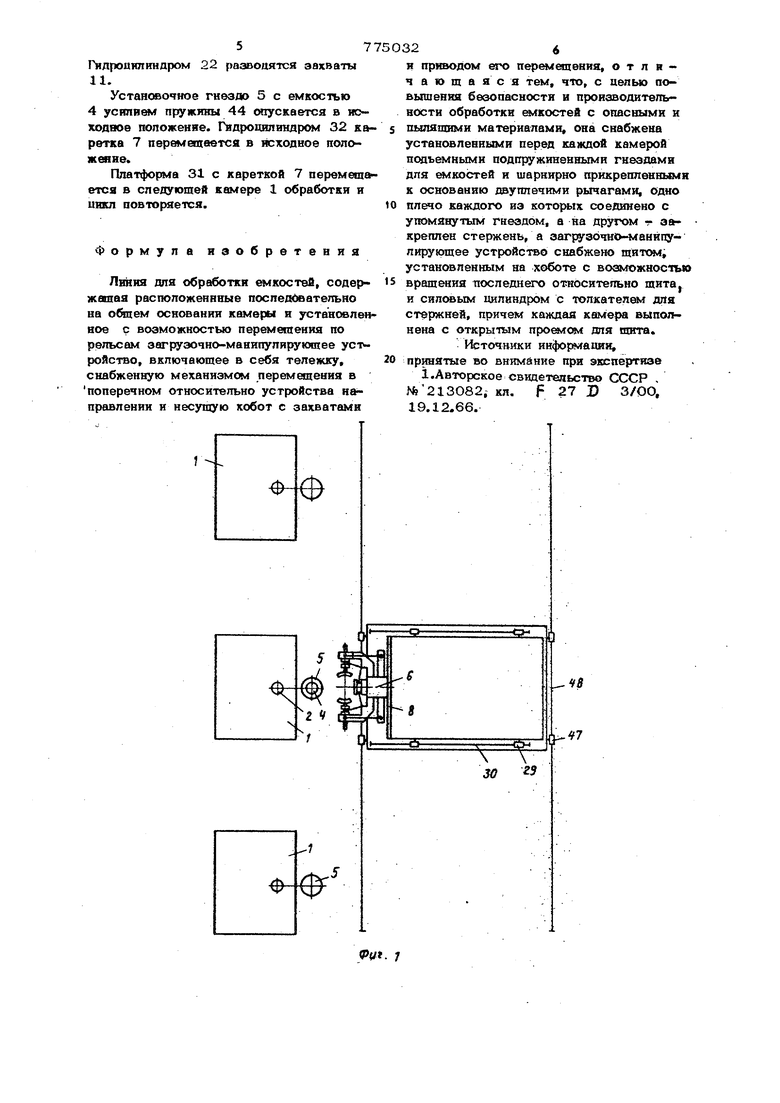
Изобретение относится к области погруэочно-разгрузочных работ, в частности для разгрузки пылящих и вредных сыпучих материалов из емкостей со см&шениым данным; отверстием , а также может быть использовано для разгрузки материалов, требующих предварительного смешивания или взбивания за счет слож него программируемого движения емкости в изолированной защитной камере, снабженной аспирашюнной системой. Известна линия обработки емкостей, содержащая расположенные последователь но на основании камеры н установ ленное с возможностью перемещения по рельсам загруэочно-манипулярующее усройство, включаюшее в себя тележку, снабженную механизмом пвреметеяяя в поперечном относительно устройства направлении и HecyrsQr кобот с захватами я приводом его переметцения lj. Недостатком известного устройства является отсутствие герметизации камер во время загрузки и не обеспечено слож ное движение захватов, обеспечивающее необходимые технологические операции обрабатываемой емкости. Налью изобретения является асюышение безопасности обработ-ки сыкостеЛ с опасными и пылящими материалами. Для этого предлагаемая линия снаб еаа устан :юленными перав каждой ке мерой подъемными подпружиненными гнездами для емкостей и шарнирно прикрепленными к основанию дауплечими рычагами, одно плёчо каждого из которых соед нено с упомянутым гнездом, а на другом закреплен стержень, а загрузочно-маниву- лирующее устройство снабжено шитом, устав юленн 2М на хоботе с возмохшостью вращения последнего относительно щята, и силовым цилиндром с толкателем для стержней, причем каждая камера выполнена с открытым проёмом дпа пшта. На фиг. 1 изображена предлагаемая ЛИНИ51, вид сверху; на фиг. 2 - то же, вид сбоку; на фиг. 3 - то же, разрез. 3 Линия состоит иа камер 1 обработки снабженных аспирадионной системой 2 и проемом 3 дпя вноса обрабатьшаемой емкости 4. Перед каждой камерой обработки расположено подъемное установочное гнездо 5. Камеры 1 обработки рас положены по фронту, перед ними находится подвижное загруэбчйо-маннпулирующе устройство б, выполненное в виде карет ки 7. На каретке 7 установлен вертикал ный раэделит8льно запирающий щит 8, , сквозь который проходит хобот 9. На переднем конце хобота жестко закреплены кронштейны 10, несушие захваты 11 которые укреплены на шпинделях 12, смонтированных в корпусах 13, укрепленных на концах кронштейнов Ю. В корпусах 13 расгтоложены поводковые втулки 14, которые через скользящие шпонки связаны со шпинделями 12 и н&сут на себе пальиы 15. Внутри хобота 9 расположены трубчатый толкатель 16 и тяга 17, а снаружи закреплено зубчатое колесо 18. Щит 8 выполнен по профилю, соответ ствующему профилю п{юемоБ 3 камер 1 обработки, и снабжен уплотнениями 19 и 2О. Трубчатый толкатель 16 снабжен на заднем конце кольцевой муфтой, которая сцеплена с водилом 2I, закрепленном на штоке гидроиилиидра 22 зажима. На переднем конце толкатель 16 снабжен пазами для контакта с хвостовиками двуплечих рычагов 23, причем вторым концом двуплечиерычаги зацепляются с кольцевыми муфтами 24, закрепленными на шпинделях 12. Тяга 17 жестко закреплена на штоке трехпозиционного гидроцилиндра 25 продольного качания и снабжена траверсой 26, которая через пальцы 27, шатуны 28 и пальцы 15 связана с поводковыми втулками 14. Каретка 7 установлена катками 29 . на рельсах ЗО, укрепленных на платфо ме 31. На каретке 7 установлен трехпозици онный гидрошшиндр 32 перемещения каретки, на штоке которого закреплена зуб чатая рейка 33, находящаяся в зацеплена с зубчатым колесом 34, которое жестко закреплено на оси 35. Второе зубчатое колесо 36, также жестко закрепленное на оси 35, находится в зацеплении с зубчатым колесом 37, которое зацеплено с зубчатой рейкой 38, жестко закрепленной на платформе 31 , На каретке 7 также смонтирован гидроцилиндр 39 подъема установочного 24 гнезда 5, шток которого несет толкатель 4О, воздействукяпий на стержень 41, шарнирно связанный через коромысло 42 со стежнем 43, на котором крепится установочное гнездо 5. Стержень 43 с гнездом 5 в исходном (нижнем) положении удерживается пружиной 44. Зубчатое колесо 18 зацеплено с зубчатой рейкой 45, укрепленной на штоке гидроцилиндра 46 опрокидывания и поперечного качания. Платформа 31 катками 47 установлена на рельсы 48, закрепленные на опорной конструкции 49. На этой же опорной конструкции закреплены шарнир 5О, в которбм качается коромысло 42, а также направляющие стержней 41 и43 и квмеры 1 обработки. Все механизмы привода защищены кожухом 51. Предлагаемая линия работает следук шим образом. Емкость 4 останавливается в гнезде 5. Платформа 31 перемешается к соответствуюшей камере 1 обработки. Усилием гидроцилиндра 32 каретка 7 с разведенными захватами 11 подъезжает к установочному гнезду 5. Усилием гидроцилиндра 39 установочное гнездо 5 с подготовленной для обработки емкостью 4 поднимается так, чтобы центр емкости расположился на оси захватов 11. Усилием гидроцилиндра 22 осуществляется зажим емкости 4 захватами 11. Устаковочное гнездо 5 усилием пружины 44 опускается в исходное положение. Усилием гидрошшиндра 32 каретка 7 перем гяается дальше и вносит емкость 4 в проем 3 камеры 1 обработки, при этом щиТОМ 8 проем 3 запирается. Усилием гидроцилиндра 46 осуществляется опрокидывание емкости 4 и ее поперечное качение. Усилием гидроиилиндра 25 осуществЛяется продольное качение емкости. Регулировкой скоростей прюдольного и поперечного качания достигается получение наиболее оптимального закона сложного движения обрабатываемой емкости 4. По истечении заданного времени обработки гидроцилиндрами 25 и 46 емкость 4 возвращается в исходное положение (положение, котором емкость 4 была внесена в камеру 1 обработки). Гндроцилиндром 32 каретко отводится в положение, где ось емкости 4, эажатч й захватами 11 будет совпадать с осью установочного гнезда 5. Гняроцилиндром 39 установочное гнездо 5 поднимается.
Гидроияпиндром 22 развопятся захваты 11.
Установочное гнездо 5 с емкостью 4 усаппем пружины 44 опускается в исходвое положеняе. Гидроциландр 32 каретка 7 перемещается в исходное положояие.
Платформа 31 с кареткой 7 перемеш ется в сле/ уюшей камере 1 обработки и цикл повторяется.
иаобретения
о р м у л а
Линяя для обработкя емкостей, содержашая рас по ложен иные поспеддвательно на обтем основанни камеры я установленное с возможностью переметения по рельсам загрузочно-маннпулируюгоее yci ройство, включающее в себя тележку, снабженную механизмом перемешения в поперечном относительно устройства направлении и несущую хобот с захватами
и приводом его перемешения, о т л и ч а ю щ а я с я тем, что, с целью повьппения безопасности и производительности обработки емкостей с опасными и
пылящими материалами, она снабжена установленными перед каждой камерой подъемными подпружиненными гнездами для емкостей и шарнирно прнкрепленньа и к основанию двуплечими рычагами, одно
плечо каждого из которых соединено с упомянутым гнездом, а на другом -г креплен стержень, а загрузочно-манйпупиру рщее устройство снабжено щит(«; устанеюленным на хоботе с возможностью
вращения последнего относительно щита, и цилиндром с толкателем для стержней, причем каждая камера выполнена с открытым проемом для пшта. Источники информаш1и,
принятые во внимание при экспертизе 1.Авторское свидетельство СССР , №213082, кл. F 27 D З/ОО, 19.12.66.
Л1
-gK
30 25
(Pyt. 7 3f t а
