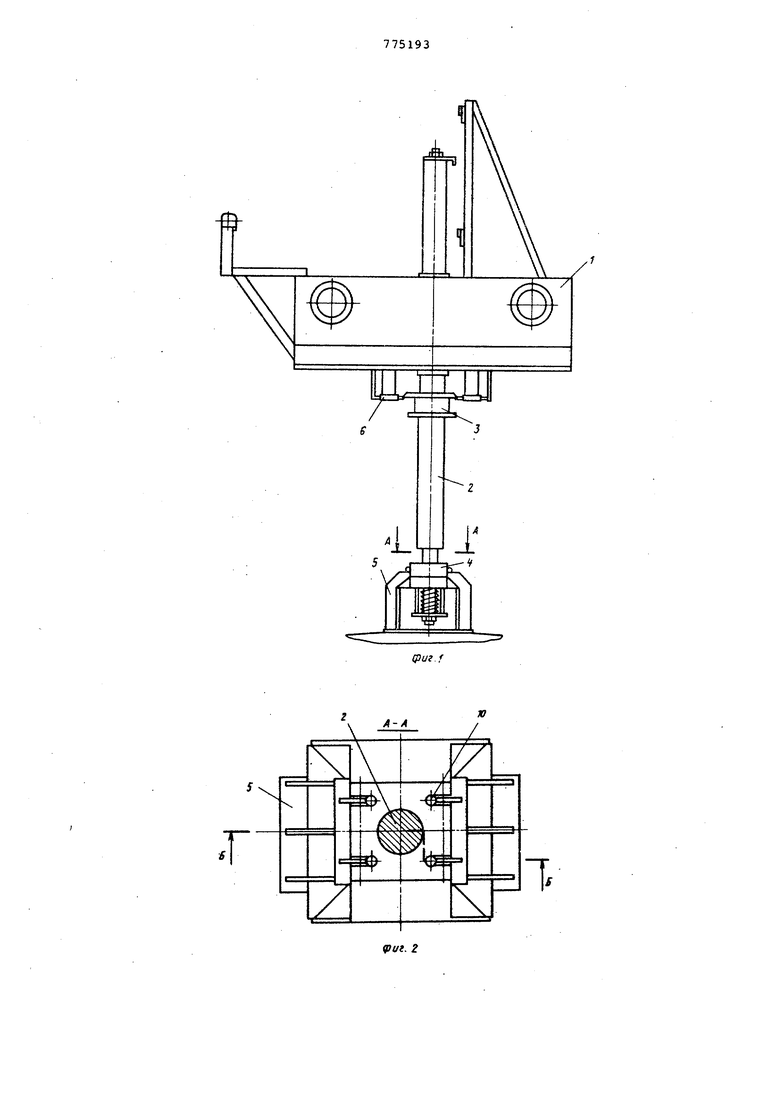
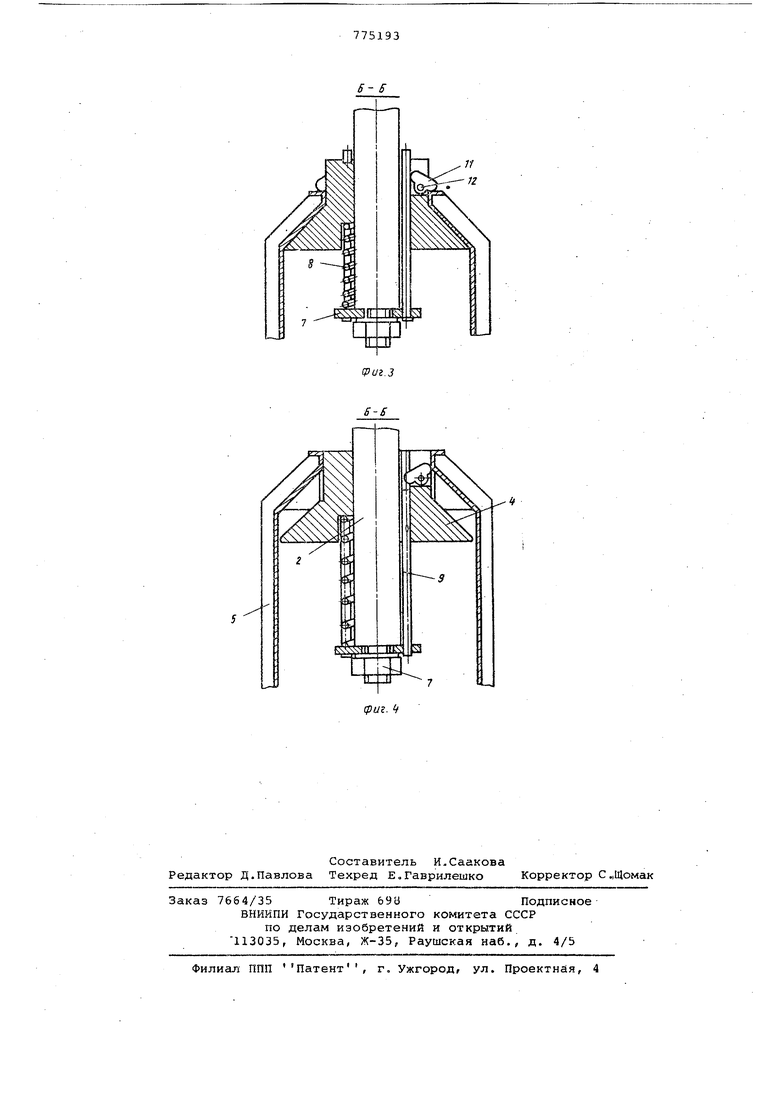
Изобретение относится к области нанесения покрытий на детали и может быть применено в автооператора} ; перемещающих детали от одной технологической ванны к другой. Известен автооператор для гальва нической линии, выполненный в виде каретки, снабженной механизмом подъе ма и опускания штанги с захватами для подвесок, к которым подвешиваются обрабатываемые детали 11. Это устройство является наиболее близким к заявленному по технической сущности и достигаемому результату. Однако этот автооператор не приспособлен для удаления излишков покрывающего материала с изделий после извлечения их из технологической ванны. Излишки материала после остывания или высыхания его на деталях образуют неровности, пор тящие внешний вид деталей и ведут к дополнительному расходу материала. . Целью изобретения является повышение качества покрытий за счет удаления с деталей излишков материала покрытия. Поставленная цель достигается тем что автооператор снабжен подпружиненным башмаком для захвата подвесок и бойком, расположенным на штанге. При этом башмак выполнен с отверстиями и снабжен фиксаторами подвесок, штоками, прикрепленными к штанге и проходящими через отверстия башмака . На фиг. 1 изображен автооператор, общий вид на фиг. 2 - разрез А-А на фиг. 1 на фиг.З - разрез Б-Б на фиг. 2; на фиг. 4 - то же, освобождение подвески. Автооператор содержит каретку 1, на которой смонтирована перемещающаяся вверх-вниз штанга 2, несущая боек 3 и бгиимак 4, надетые на штангу. Зацеп 5 подвески прилегает к наклонной поверхности башмака 4. Боек 3 установлен свободно на штанге 2 и зафиксирован в верхнем положении фиксаторами 6, управляемыми от электромагнита и прикрепленными к каретке I автооператора. На конце штанги 2 имеется упор 7. Между башмаком и упором установлена пружина 8. К упору прикреплены штоки 9, которые проходят через отверстия 10 в башмаке 4. Башмак 4
снабжен рычажными фиксаторами в виде собачек 11, установленных на осях 12.
Автооператор работает следующим образом.
В начале обработки, когда зацеп 5 подвески еще не навешен на автооператор, пружина 8 находится в раслабленном положении, а собачки 11 опираются на концы штоков 9. Когда подвески надевают на бш:так 4 автооператора, пружина 8 сжимается, и беиымак 4 опускается. Штоки 9 при этом упираются в собачки 11 и поворачивают их, зажимая зацепы 5 подвесок .
После выемки подвески из ванны и поднятия ее на определенную.высоту срабатывают электромагниты (обычно от системы управления автооператором), управляющие фиксаторакш 6, в результате чего фиксаторы освобождают боек 3.
Боек падает вниз по штанге 2 и ударяет по подпружиненному башмаку 4, на котором укреплен зацеп 5 подвески. При ударе пружина 8 сжимается, а затем резко разжимается, получая при этом колебательные движения. Одновременно колеблется подвеска с деталями, которой передает колебательные движения ее зацеп 5. За. счет этого и происходит стряхивание излишков покрытия с деталей. Штоки У имеют такую длину, чтобы они не выходили из зацепления с собачками 11 и с зацепом 5 подвески при определенной амплитуде колебаний башмака 4 в вертикальной плоскости.
Таким образом, собачки 11 зажимают зацеп 5 подвески во время ее встряхивания и во время передвижения автооператора от одной ванны к другой и препятствуют раскачиванию подвески, толчкам и встряске.
При дальнейшем подъеме подвески боек поднимается в верхнее положение и фиксируется в нем зацепами 5.
Описанный механизм встряхивания подвесок обеспечивает эффективное удаление с деталей излишков расплава, лака, краски после их обработки погружением.
Формула изобретения
1.Автооператор, содержащий приводную каретку, штангу и механизм
0 привода штанги, отличающийс я тем, что, с целью повышения качества покрытий за счет удаления с деталей излишков материала покрытия, он снабжен подпружиненным башмаком для захвата подвесок и бойком, расположенными на штанге.
2.Автооператор по п. 1, отличающийся тем, что башмак выполнен с отверстиями и снабжен фиксаторами подвесок, штоками, прикрепленными к штанге и проходящими через отверстия башмака.
Источники информации, щэинятые во внимание при экспертизе 35 1. Авторское свидетельство СССР 427095, кл. С 25 D 19/00, 1970.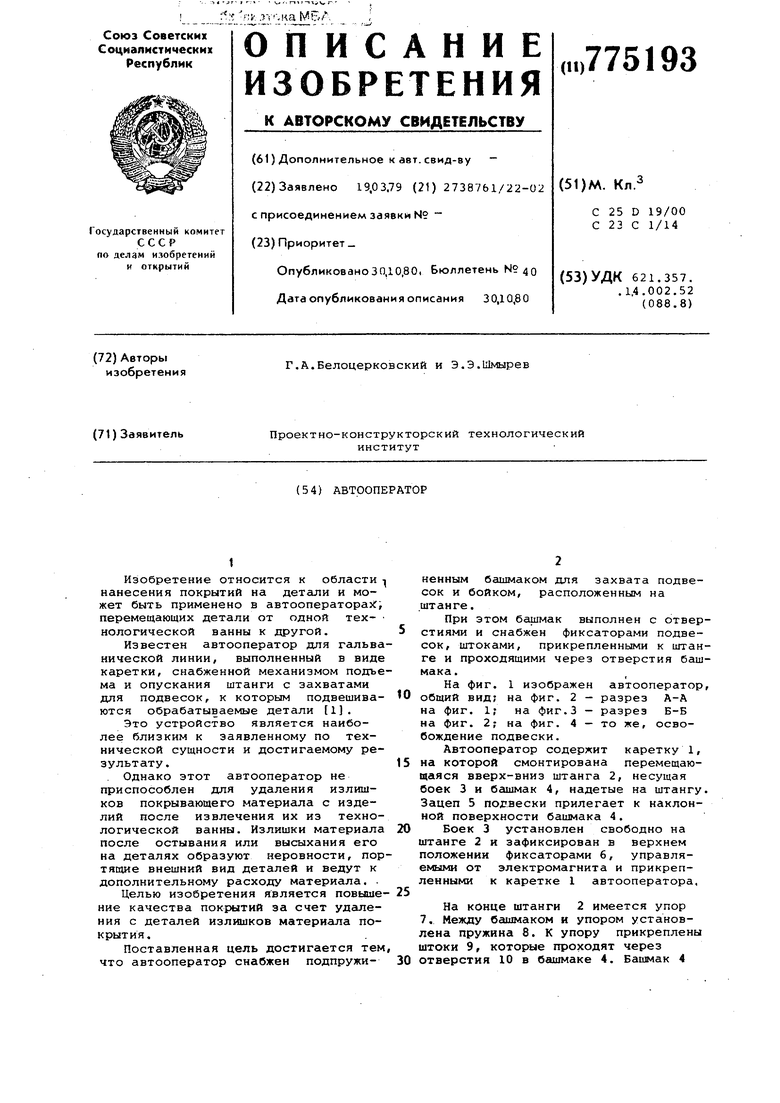
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор для гальванических линий | 1988 |
|
SU1537714A1 |
| Установка для гальванической обработки деталей | 1981 |
|
SU996527A1 |
| Устройство для гальванической обработки деталей | 1987 |
|
SU1497290A1 |
| РОТОРНАЯ УСТАНОВКА ДЛЯ НАНЕСЕНИЯ ГОРЯЧИХ ПОКРЫТИЙ | 1992 |
|
RU2049147C1 |
| Автооператор для транспортировки деталей | 1979 |
|
SU859782A1 |
| Гальваническая автооператорная линия для обработки мелких деталей | 1981 |
|
SU986972A1 |
| Автоматическая линия для гальванохимической обработки печатных плат | 1980 |
|
SU885367A1 |
| Устройство для гальванохимической обработки деталей | 1977 |
|
SU642383A1 |
| Автоматическая линия спутникового типа | 1991 |
|
SU1784445A1 |
| Автооператор для гальванохимических линий | 1985 |
|
SU1330057A1 |