дит на поворотный копир, происходит сжатие одной из пружин и захват перемещается на расстояние 1. При дальнейшем движении упор 15 сходит с копира , пружина резко разжимается, сообщая колебательное движение подвеске с деталями. Так как копиры расположены на обеих направляющих в шахматном порядке, происходит постоянное ю
колебательное движение подвески. При движении траверсы вниз упоры 15 и 16, поочередно воздействуя на копиры, поворачивают их, поэтому колебательного движения не происходит. Такое конструктивное выполнение обеспечивает удаление с обрабатываемых деталей излишков раствора во время подъема их из ванн. 1 з.п.ф-лы, 6 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1979 |
|
SU775193A1 |
| Агрегат для химической подготовки поверхности | 1982 |
|
SU1168631A1 |
| Автомат для нанесения гальванических покрытий | 1990 |
|
SU1733512A1 |
| Автооператор для гальваноавто-MATOB | 1979 |
|
SU850761A1 |
| Автооператор | 1982 |
|
SU1057237A1 |
| Устройство для перегрузки подвесок с траверс подвесного конвейера | 1981 |
|
SU1004227A1 |
| Устройство для гальванической обработки деталей | 1987 |
|
SU1497290A1 |
| Автооператор для гальванических линий | 1988 |
|
SU1615236A1 |
| Агрегатный многопроцессный автомат для гальванической и химической обработки деталей | 1960 |
|
SU148315A1 |
| Автоматическая линия спутникового типа | 1991 |
|
SU1784445A1 |
Изобретение относится к гальванотехнике, в частности к устройствам для транспортировки изделий при нанесении гальванических покрытий. Целью изобретения является снижение энергоемкости процесса путем сокращения выноса растворов. Автооператор для гальванических линий включает раму 1 с вертикальными направляющими 2 и 3, на которых установлены поворотные копиры с фиксаторами, механизм перемещения 6 и механизм подъема 7. На траверсе 10 установлен подпружиненный захват 12 с упорами 15 и 16 на концах. При подъеме траверсы 10 с захватом 12 вверх упор 15 находит на поворотный копир, происходит сжатие одной из пружин и захват перемещается на расстояние L. При дальнейшем движении упор 15 сходит с копира, пружина резко разжимается, сообщая колебательное движение подвеске с деталями. Так как копиры расположены на обеих направляющих в шахматном порядке, происходит постоянное колебательное движение подвески. При движении траверсы вниз упоры 15 и 16, поочередно воздействуя на копиры, поворачивают их, поэтому колебательного движения не происходит. Такое конструктивное выполнение обеспечивает удаление с обрабатываемых деталей излишков раствора во время подъема их из ванн. 1 з.п. ф-лы, 6 ил.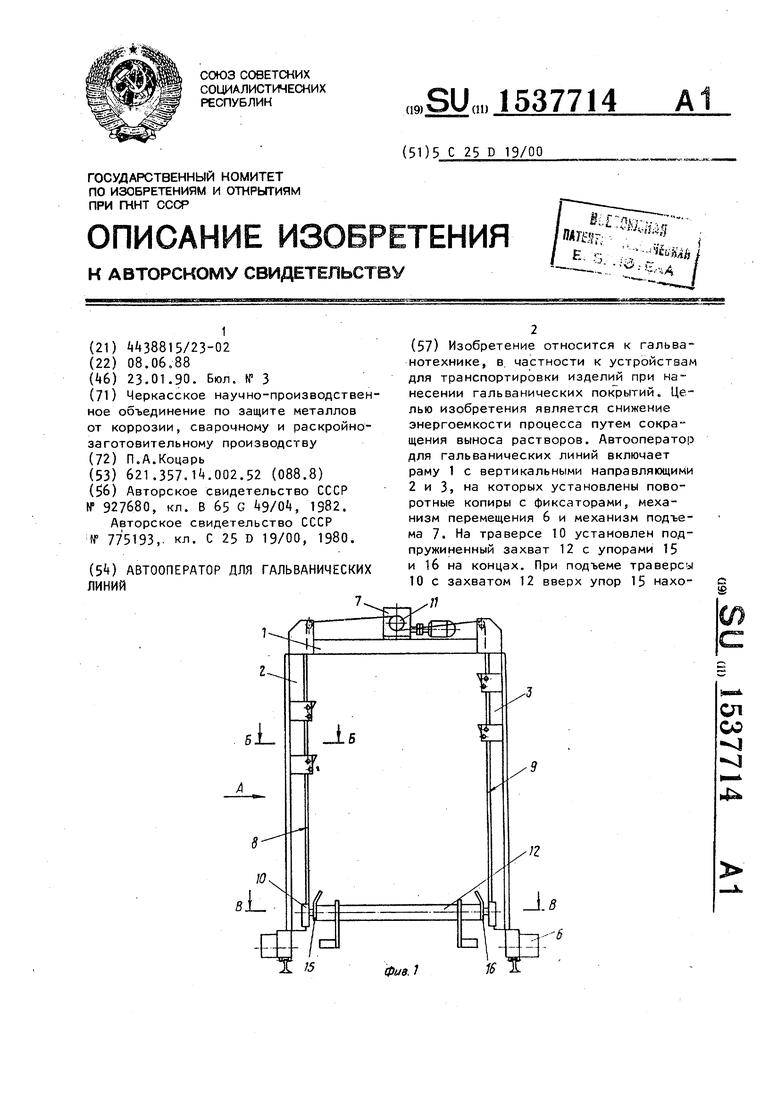
Изобретение относится к гальванотехнике, в частности к устройствам для транспортировки изделий при нанесении гальванических покрытий.
Целью изобретения является снижение энергоемкости процесса путем сокращения выноса электролита.
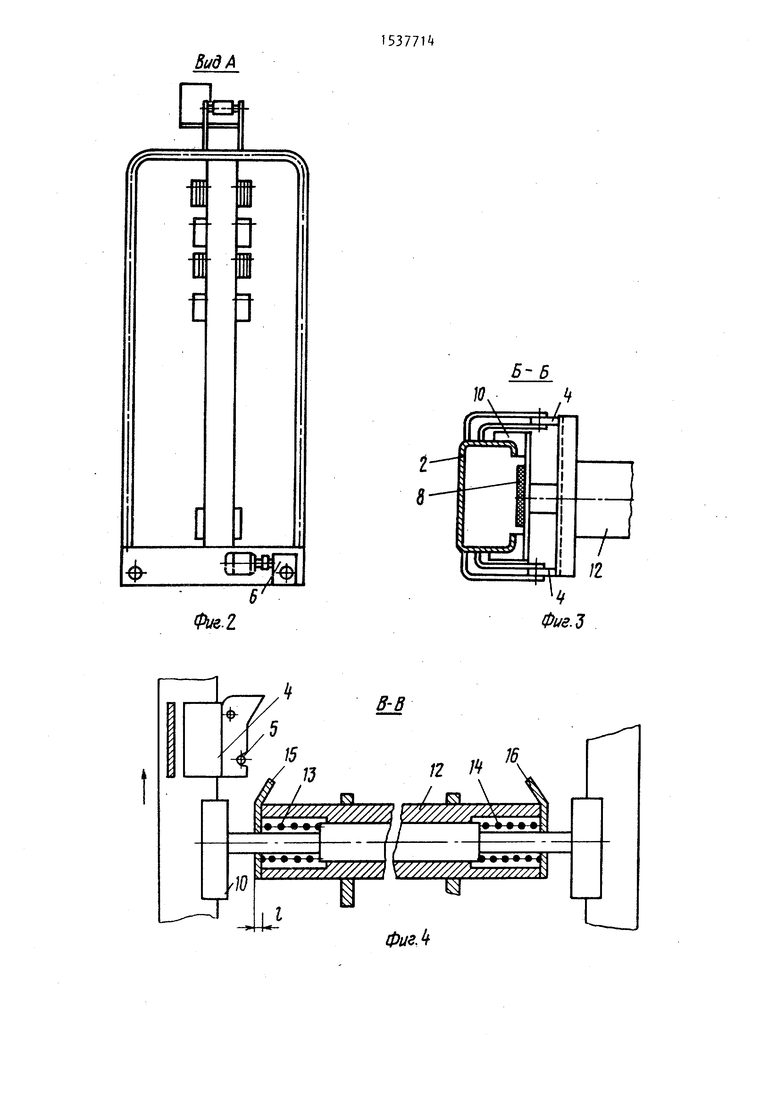
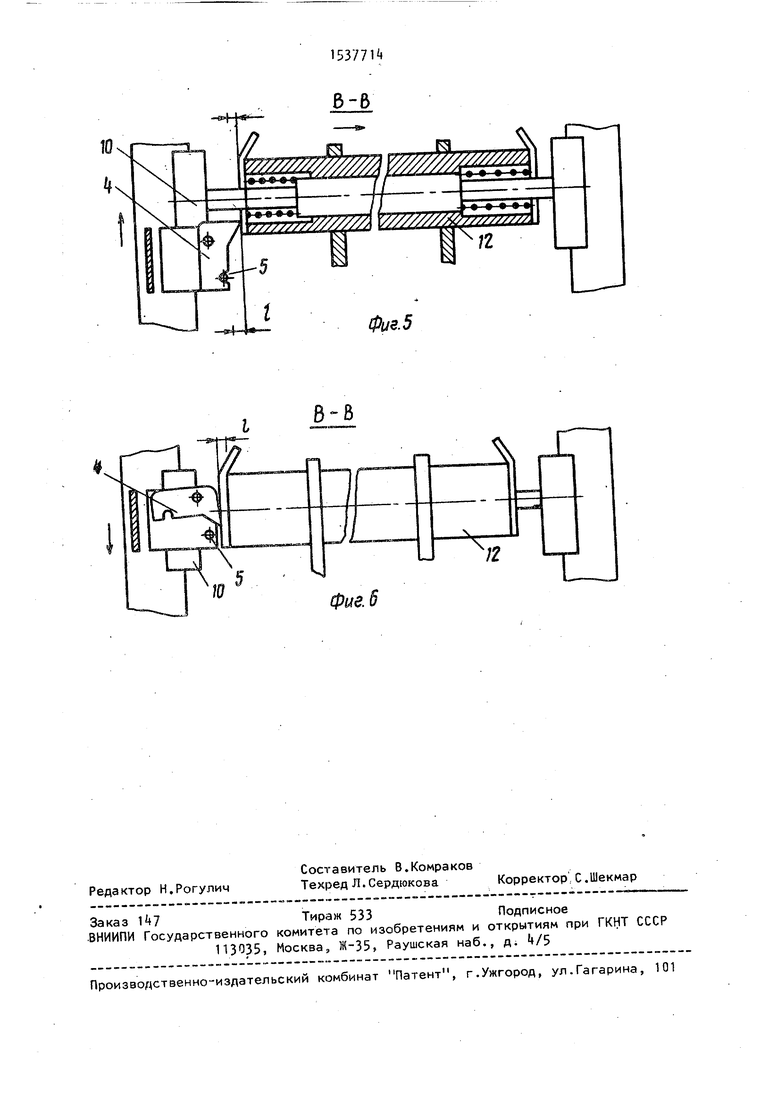
На фиг. 1 изображен автооператор; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг . k разрез В -В на фиг. 1; на фиг . 5 то же, при смещении захвата вправо; на фиг, 6 - то же, при опускании зах- |вата.
Автооператор содержит раму 1, н состав которой входят вертикальные направляющие 2 и 3 с поворотными копирами 4 и фиксаторами 5, механизм б перемещения, механизм 7 подъема, в состав которого входят гибкие тяговые органы 8 и 9, закрепленные на траверсе 10 и и via ч ываемые на барабан 11 .
На траверсе 10 установлен захват 12 с пружинами 13 и и установленными по концам упорами 15 и 16.
Автооператор работает следующим образом.
При подъеме траверсы 10 с захватом 12 вверх упор 15 находит на поворотный копир ft, который упирается в фиксатор 5. Происходит сжатие пружины 13, и захват 12 перемещается вправо на заданное расстояние.
При схождении упора 15 с копира 1 пружина резко разжимается, получая при этом колебательное движение.
Одновременно колеблется подвеса с деталями (не показан), которая закреплена на захвате.
При дальнейшем движении вверх упор 16 находит на поворотный копир k. Происходит сжатие пружины , и захват 12 перемещается влево на за
данное расстояние. При схождении упора 16 с копира k пружина 1 резко разжимается. Получается при этом колебательное движение захвата 12 и подвески с деталями. Количество копиров выбирается из условия эксплуатации, а сами копиры расположены в шахматном порядке на вертикальных направляющих.
При движении траверсы 10 с захватом 12 вниз упоры 15 и 16 поочередно воздействуют на копиры k, которые поворачиваются и сжатие пружин 13 и не происходит, т.е. при ходе вниз колебательное движение захвата 12 не происходит.
Предлагаемый автооператор обеспечивает более эффективное удаление с обрабатываемых деталей излишков растворов или электролитов после их обработки погружением в момент их подъема.
Формула изобретения
с целью снижения энергоемкости процесса путем сокращения выноса электролита, механизм встряхивания выполнен в виде подпружиненного с двух сторон захвата, свободно установленного на оси, и фигурных поворачиваю щихся копиров, закрепленных на вертикальных направляющих с возможностью взаимодействия с подпружиненным захватом.
//////////.
У////////ЛШ////
////////ЛШ,
W
91
Ы U
Qi
W
9-8
1
2Щ
А.
3
I fl fi
jlZZCSl
в-в
фие.6
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Автооператор | 1979 |
|
SU775193A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
