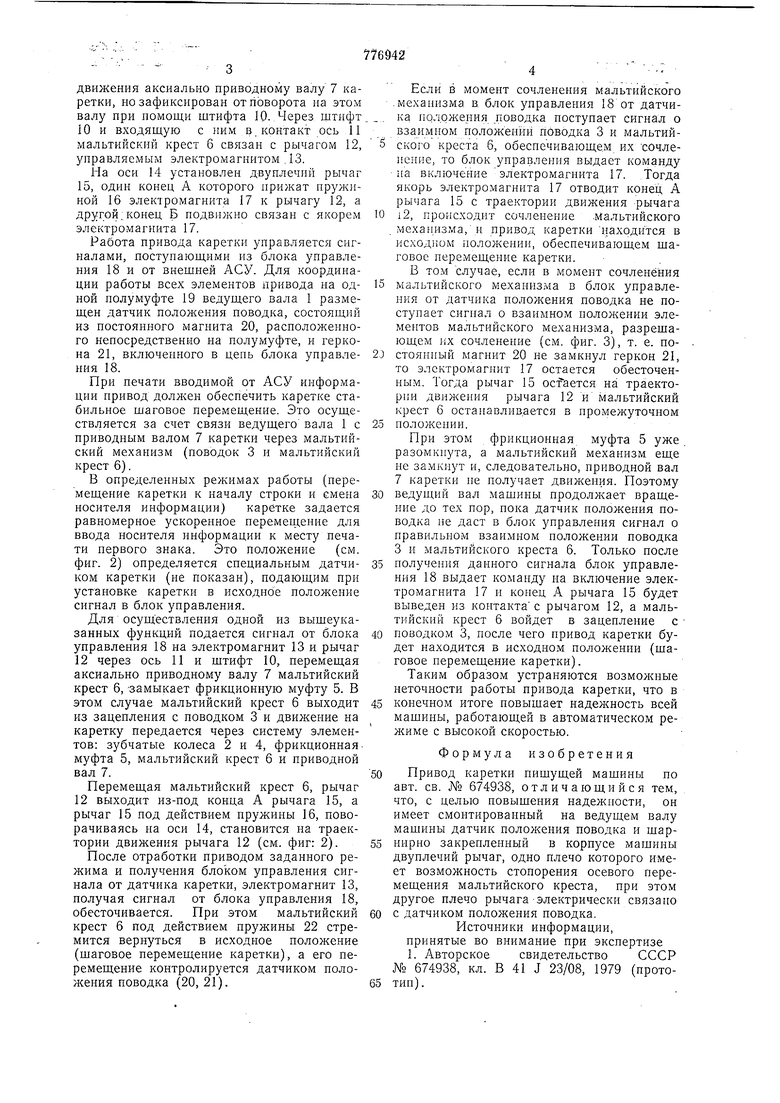
движения аксиально приводному валу 7 каретки, но зафиксирован от поворота на этом валу при помощи штифта 10. Через щтифт 10 и входяидую с ним в. контакт ось И мальтийский крест 6 связан с рычагом 12, управляемым электромагнитом .13.
На оси 14 установлен двуплечий рычаг 15, один конец А которого ирижат пружиной 16 электромагнита 17 к рычагу 12, а другой, конец Б подвижно связан с якорем электромагнита 17.
Работа привода каретки управляется сигналами, ностзпающими из блока управления 18 и от внешней АСУ. Для координации работы всех элементов привода на одной полумуфте 19 ведущего вала 1 размещен датчик пололсения поводка, состоящий из постоянного магнита 20, расположенного непосредственно на полумуфте, и геркона 21, включенного в цеиь блока управления 18.
При печати вводимой от АСУ информации привод должен обеспечить каретке стабильное шаговое перемещение. Это осуществляется за счет связи ведущего вала 1 с приводным валом 7 каретки через мальтийский механизм (поводок 3 и мальтийский крест 6).
В определенных режимах работы (перемещение каретки к началу строки и смеиа носителя информации) каретке задается равномерное ускоренное перемещепие для ввода носителя информации к месту печати первого знака. Это положение (см. фиг. 2) определяется специальным датчиком каретки (не показан), подающим при установке каретки в исходное положение сигнал в блок управления.
Для осуществления одной из вышеуказанных функций подается сигнал от блока управления 18 на электромагнит 13 и рычаг 12 через ось И и штифт 10, перемещая аксиально приводному валу 7 мальтийский крест б, -замыкает фрикционную муфту 5. В этом случае мальтийский крест 6 выходит из зацепления с поводком 3 и движеиие на каретку передается через систему элементов: зубчатые колеса 2 и 4, фрикционная муфта 5, мальтийский крест 6 и приводной вал 7.
Перемещая мальтийский крест 6, рычаг 12 выходит из-под конца А рычага 15, а рычаг 15 под действием пружины 16, поворачиваясь на оси 14, становится на траектории движения рычага 12 (см. фиг: 2).
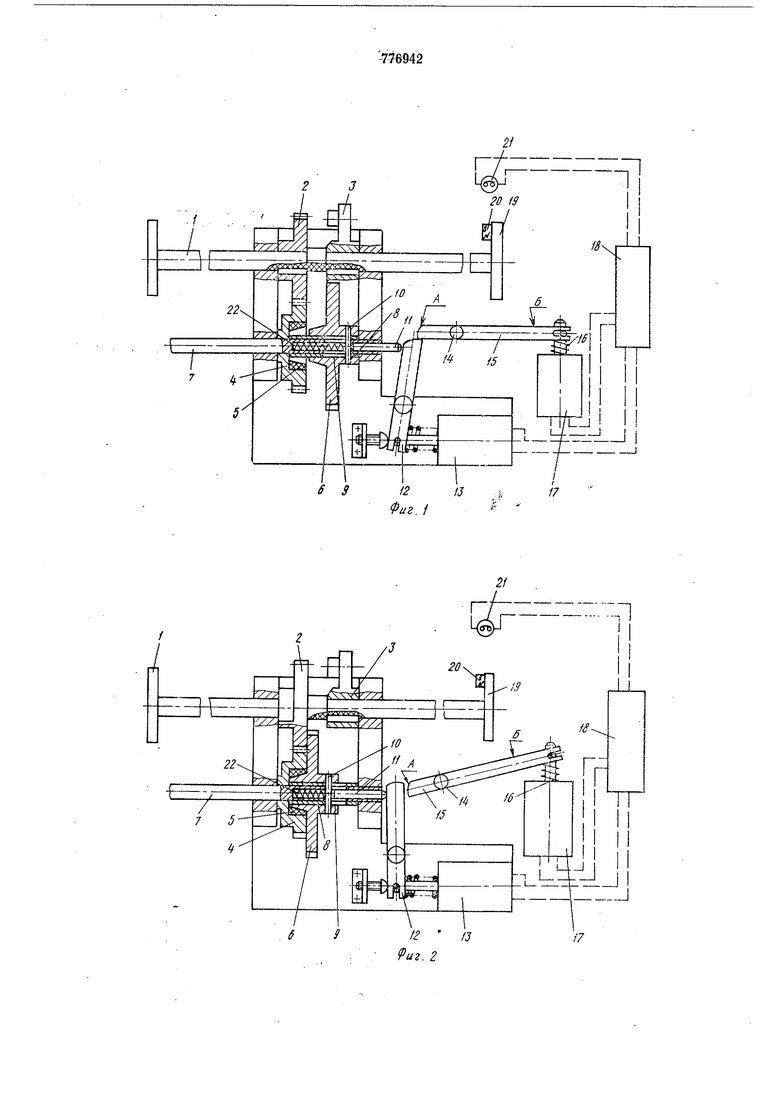
После отработки приводом заданного режима и получения блоком управления сигнала от датчика каретки, электромагнит 13, получая сигнал от блока управления 18, обесточивается. При этом мальтийский крест 6 под действием пружины 22 стремится вернуться в исходное положение (шаговое перемещение каретки), а его перемещение контролируется датчиком положения поводка (20, 21).
Если в момент сочленения мальтийского механизма в блок управления 18 от датчика подол ения поводка поступает сигнал о взаимном положении поводка 3 и мальтийСКОРО креста 6, обеспечивающем их сочленение, то блок управления выдает команду на включение электромагнита 17. Тогда якорь электромагнита 17 отводит конец А рычага 15 с траектории рычага
i2, происходит сочленение .Мальтийского механизма, н привод каретки цаходнтся в исходном иолол еннн, обеснечивающем шаговое перемещение каретки.
В том случае, если в момент сочленения
мальтийского механизма в блок управления от датчика полол ения поводка не поступает сигиал о взаимном полол ении элементов мальтийского механизма, разрешающем их сочленение (см. фиг. 3), т. е. постоянный магнит 20 ие замкнул геркон 21, то электромагнит 17 остается обесточенным. Тогда рычаг 15 остается на траектории движения рычага 12 и мальтийский крест 6 останавлнв.ается в промежуточном
нолол ении.
При этом фрикционная муфта 5 уже разомкнута, а мальтийский механизм еще ие замкнут и, следовательно, приводной вал 7 каретки не получает . Поэтому
ведущий вал машины продолл ает вращение до тех пор, пока датчик положения поводка не даст в блок управления сигнал о правильном взаимном ноложении поводка 3 и мальтийского креста 6. Только после
получения дапного сигнала блок управления 18 выдает команду па включение электромагнита 17 н конец А рычага 15 будет выведен из контактас рычагом 12, а мальтийский крест 6 войдет в зацепление с
поводком 3, после чего привод каретки будет находится в исходиом положении (шаговое неремещение каретки).
Таким образом устраняются возмол ные неточности работы ирнвода каретки, что в
конечном итоге повышает надежность всей машины, работающей в автоматическом режиме с высокой скоростью.
Формула изобретения
Привод каретки пишущей машины по авт. св. № 674938, отличающийся тем, что, с целью повышения надежности, он имеет смонтированный на ведущем валу машины датчик пололсеиия поводка и шариирно закренленный в корпусе машины двуплечий рычаг, одно плечо которого имеет возмол иость стопорения осевого перемещения мальтийского креста, при этом другое плечо рычага электрически связано
с датчиком положения поводка.
Источники информации, нринятые во внимание при экспертизе 1. Авторское свидетельство СССР № 674938, кл. В 41 J 23/08, 1979 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения запечатываемого материала | 1975 |
|
SU654456A1 |
| Привод катерки пишущей машины | 1976 |
|
SU674938A1 |
| МАШИНА ДЛЯ ФРАНКИРОВАНИЯ ПОЧТОВЫХ ПАКЕТОВ | 1970 |
|
SU280365A1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ БОБИН | 1991 |
|
RU2043289C1 |
| Загрузочное устройство | 1988 |
|
SU1579719A1 |
| Устройство для подачи и перемещения изделий | 1989 |
|
SU1724547A1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ИЗДЕЛИЙ ПРЕИМУЩЕСТВЕННО В МНОГОРЯДОВНЫЕ КАССЕТЫ | 1989 |
|
RU2013899C1 |
| ВСШОЮЗИАЯ [!:^Т::?п'но-таш4?:|1/ | 1973 |
|
SU372754A1 |
| Автомат для сборки изделий типа цепного транспортера | 1973 |
|
SU518316A1 |
| Установка для микроскопического анализа препаратов тутового шелкопряда | 1986 |
|
SU1407468A1 |
Риг. 3 13
