(54) ПНЕВМАТИЧЕСКИЙ ЗАХВАТ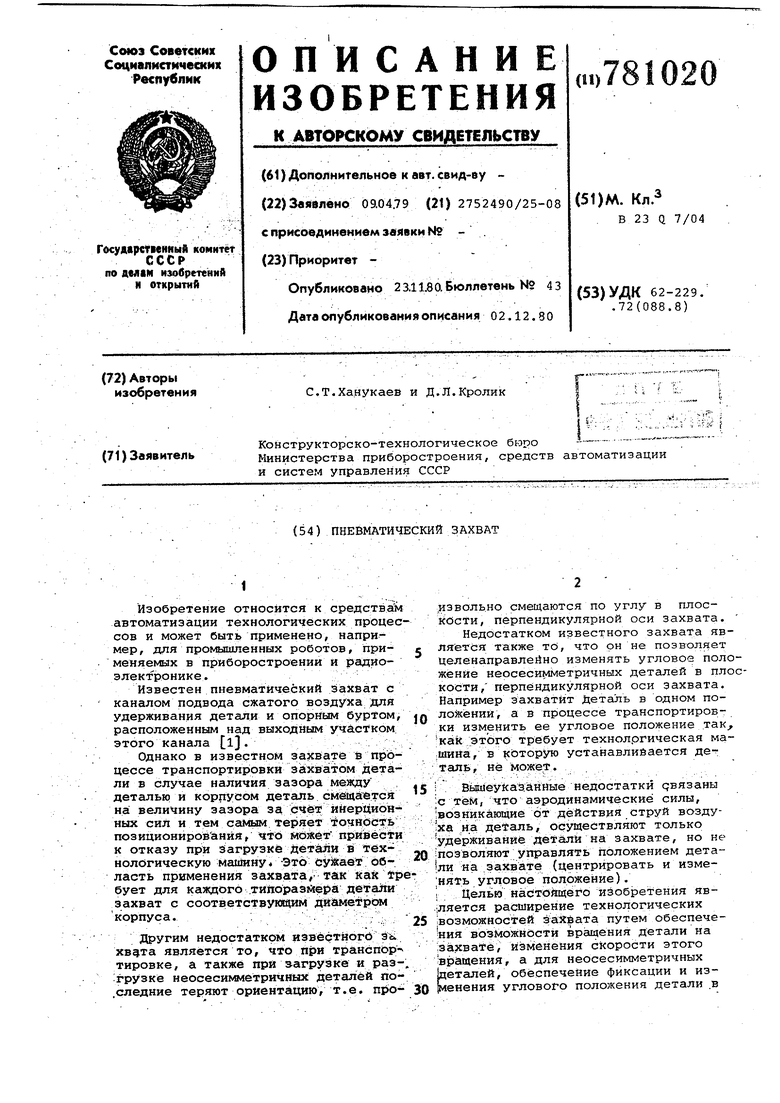

| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический захват | 1977 |
|
SU682352A1 |
| Пневматический захват | 1980 |
|
SU891431A1 |
| Пневматический захват | 1983 |
|
SU1098793A1 |
| Пневматический захват | 1983 |
|
SU1117207A1 |
| Пневматический схват | 1983 |
|
SU1135639A1 |
| Роторно-конвейерная линия | 1991 |
|
SU1821334A1 |
| Пневматический захват | 1973 |
|
SU447243A1 |
| ПНЕВМАТИЧЕСКИЙ СХВАТ | 2001 |
|
RU2199432C2 |
| Вакуумный захват | 1988 |
|
SU1646859A1 |
| Захватное устройство | 1984 |
|
SU1288046A1 |
Изобретение относится к средствaiw автоматизации технологических процес сов и может быть применено, например, для промышленных роботов, применяемых в приборостроении и радиоэлектронике. Известен пневматический захват с каналом подвода сжатого воздуха для удерживания детали и опорным буртом, расположенным над выходньлм участком этого канала l. Однако в известном захвате S процессе транспортировки захватом детали в случае наличия зазора между деталью и коррусом деталь сШ«йется на: величину зазора за сЧё йнерЦибнных сил и тем са)мым теряет очНбсть позиционирований, что может привести к отказу при Загрузке йетали в технологическую машину -Это сужает область применения захвата; так как tp бует для казкдого .типоразйеЕ а детайи захват с соответствующим Диаметром корпуса. : . Другим недостатком извёстйогб эк является то, что при транспорт тировке, а также при загрузке и раз грузке неосесиквметричных деталей по.следние теряют ориентацию, т.е. про113вольно смещаются по углу в плоскости, перпендикулярной оси захвата. Недостатком известного захвата является также то, что он не позволяет целенаправлейно изменять угловое положение неосесимметричных деталей в плоскости, перпендикулярной оси захвата. Например захватит Деталь в одном положёний, а в процессе транспортировки изм енить ее угловое положение так как этбго требует технолргическая ма:Шийа, в тсоторую устанавливается деТаль,, не может. i Вьшеуказ.айные недостатки двязаны .с тем, что аэродинамические силы, возникающие от действия струй возду1ха на деталь, осуществляют только удерживание детали на захвате, но не позволяют управлять положением дета ли на saxBiaTe (центрировать и изме нять угловое положение). , Целью , настойщего йзобретгения яв.1ляется расширение технологических ;возможностей захвата путем обеспече:ния возможности вращения детали на :захватё, изменения скорости этого вращения, а для неосесимметричных деталей, обёспечейие фиксации и изЧленения углового положения детали .в
g Hc -S-Jib- -i Jif-tv-:;;
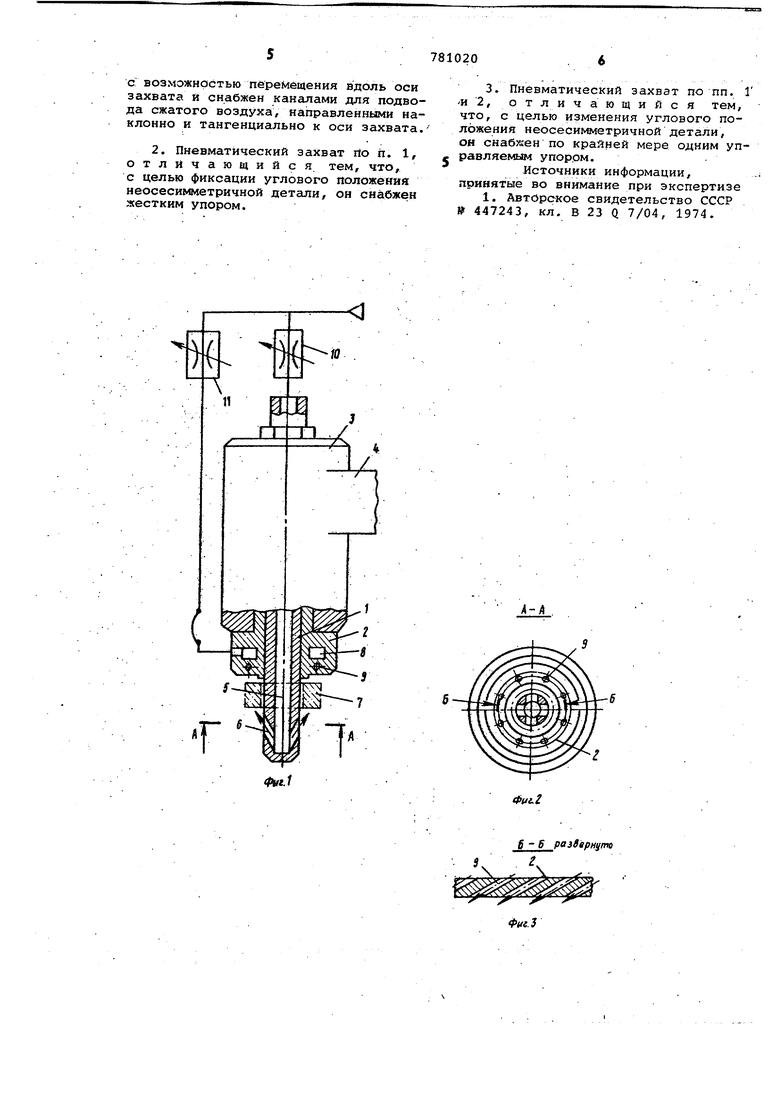
78li32d плоскости, перпендикулярной оси . ,- :,-:.-. . - ,.:. УкаЭЖйГйая цель дрститается тем, в известном пневматическом захвате бурт выпьлнен с BuSMb fifeeTSia 1ШраШИ(ёния gflOJtb захвата и снаб жен кайапами для подвода сжатого воз S y jrar, коГорыё выполнены наклонно и тангенциально к оси захвата. Кроме того, с целью фиксации углового положения неосесимметричной детали, захват снабжен жестким упором. Еще одним отличием захвата явля ётбя то, что, с целью изменения углового положения неосесимметричной детали, он снабжен по крайней мере ОДНИМ управляемым упором. На фиг. 1. изображен предложенный, пневматический захват со схемой подвода сжатого воздуха, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрезБ-Б на фиг. 2; на . фиг. 4 - пневматический захват с управляег«лми упорами; на фиг. 5 - вид по стрелке В на фиг. 4. Пневматический захват сост.оит . из стержня 1 и бурта 2 (фиг. 1), которые установлены в приводе 3, слу для перемещения бурта вдоль оси захвата. Для перемещения захвата служит рычаг 4. В стержне 1 выполнен канал 5 с выходными участка1мй б i к6т бpыё Ifpёд 7 ШWaчёHa дйя пОЯвхзда воздуха и уде живания детали 7 на захватеТ В бурте 2 выполнен кольцевой ка. нал 8 и сообщенные с ним каналы 9, р аёпЬложённыё под углом и Тангенциально к оси захвата (фиг. 2 и 3). Каналы 8 и 9 служат Для подвода воз духа к детали 7 и обеспечения ее вр - щения. суммарная площадь поперечного се чения каналов б значительно больше суг/1марной площади поперечйого сечения каналов 9, на магистралях подвода воздуха установлены дроссели 10 и 11 для по вода воздуха cooffeef cfBeHHoTK кайал 5 и 9. Дроссели служатдля регулиро --- ган яйГОличествавоздуха, пЗдавЪёМого в эти каналы.. К бурту 2 прикреплены жесткий уп 1.2 (фиг. 5), преднаТначённыЙ для фй саЦии неосесимметричной детали 13, а также управляемый упор 14, для пе ремещения которого служит привод 15 Пневматический захват работает с дующим образом. На деталь 7, уЬТановленную на ст жне 1, действуют струи воздуха из каналов 5 и б и поджимают ее к бурт воздуха, истёкакядие из ка налов , несколько отжимаютдёталь от бурта 2 (за счет того, - 1ГЖЙальГраЪ поло хен13-йод оси захвата) и создают крутящий момент(за счет тангенциального расположения аналов к оси захвата). При полностью открытых дросселях 0и 11 сброс детали 7 с захвата не роисходит вследствие того, что сумарная площадь поперечного сечения аналов 6 значительно больше сумарной площади поперечного сечения . аналов 9. При необходимости изменения скорости вращения детали или некоторого измёнёйй ee ntsMO ceHHf5E вдоль стержня 1, посредством дросселя 10 или 11изменяется количество воздуха, подаваемого под деталь 7. При значительном же уменьшении дросселем 10 кблйчёства подаваемого через каналы б воздуха или полном его перекрытии происходит сброс детали с захвата за счет тангенциальных струй. Для; снятия детсши 7 с захвата приводом 3 бурт 2 перемещается вдоль оси захвата. .Благодаря йращению детали 7 и попаданию воздуха, истекающего из каналов 6, в зазрр между деталью 7 и стержнем 1, происходит центровка детали относительно оси стержня 1. Центровка обеспёчйвается в достаточно большом диапазоне зазора между деталью 7 и стержнем 1 и сохраняется до снятия дета-, ли со стержня. I При работе с неоресимметричными деталями вращение детали происходит гаКжё, ка:к йзлОЖёно выше.- . Bi случае наличия на захвате упора 12деталь 13 зафиксируется на этом упоре. Если же деталь 13 в начале была зафиксирована на управляемом упоре 14, а установить ее в технологическую машину следует в другом угловбм положении, например зафиксированной на упоре 12, х° в процессе транспортирования детали приводом 15 убирается упор 14, и под Действием тангенцис1льйых струй воздуха деталь 13 переместится и зафиксируется на упоре 12. Обеспечение центровки деталей с раз ЛИЧНЫМИ 3 аз о эамимежду деталью и стержнёЙ7 во31ЯожнЬсть изменения скорости вращения детали и ее осевого пбложёнйй йа захвате, возможность изменения углоеого положения неосесимметричной детали и фиксирование в нуЖйем ypjroBoM положении значительно расширяют технологические возможности пневматического захвата. Формула изобретения 1. Пнев.матический- захват с каналом подвода Шатого воздуха для удерживания детали и опорным буртом, расположен HKIM над выходным участком этого канала , отличающийся тем, что, С Целью расширения технологических возможностей, бурт выполнен
с возможностью перемещения вдоль оси захвата и снабжен каналами для подвода сжатого воздуха, направленными наклонно и тангенциально к оси захвата.2. Пневматический захват rto п. 1, отличающийся тем, что, с целью фиксации углового положения неосесимметричной детали, он снабжен жестким упором.
Источники информации, принятые во внимание при экспертизе
Фиг.1
А-А
Фиг. 2
