(54) МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1978 |
|
SU727423A2 |
| Манипулятор | 1986 |
|
SU1380927A1 |
| Манипулятор | 1982 |
|
SU1060465A1 |
| Манипулятор | 1984 |
|
SU1194673A1 |
| Манипулятор | 1979 |
|
SU844263A2 |
| Манипулятор | 1991 |
|
SU1774914A3 |
| Манипулятор | 1986 |
|
SU1435363A1 |
| Манипулятор | 1981 |
|
SU1013257A2 |
| Манипулятор | 1982 |
|
SU1013258A2 |
| Манипулятор | 1984 |
|
SU1252161A1 |
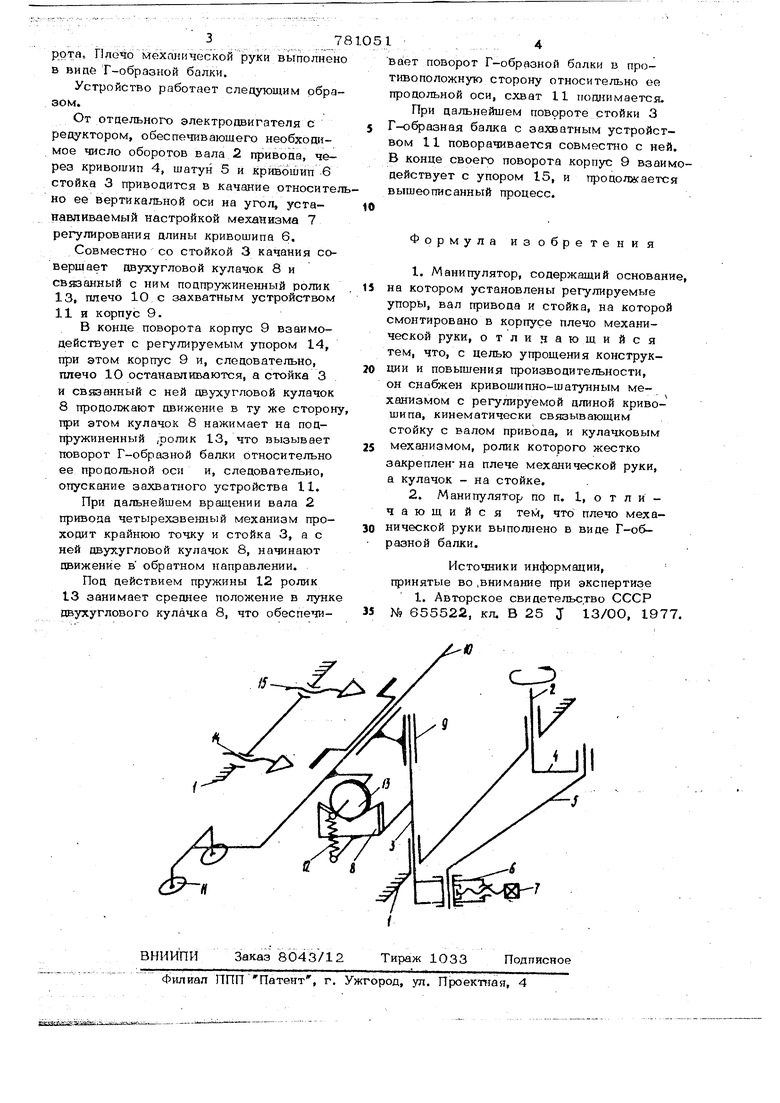
Манипулятор относится к технологическому оборудованию для перемещения изделий из оцной точки в другую и може быть использован в машиностроёййи и фугих областях техники. Известен манипулятор, содержащий основание, на котором установлены регулируемые упоры, вал привода и стойка, на которой смонтировано в корпусе плечо механической руки . Недостатком известного Манипулятора являются слоясность конструкции и малая производительность из-за наличия больших генерирующих масс. Цель изобретения - упрощение констр ци и повышение гроизводительности. Цель достигается тем, что предлбжен ный манипулятор снабжен кривошипношатунным механизмом с регулируемой длиной кривошипа, кинематически связывающим стойку с валом привода, и кулачковым механизмом, ролик последнего жестко закреплен .на плече механической руки, а кулачок - на стойке, кроме того плечо механической руки выполнено в вице Г-образной балки. Сущность изобретения поясняется чертежом, где приведена кинематическая схема устройства. Манипуляторсостоит из основания .1, на котором смонтирован вал 2 привода и стойка 3, кинематически связанные между собой кривошипно-шатунным механизмом, состоящим из кривощипа 4 шатуна 5 и кривошипа 6 с механизмом 7 регулирования длийы кривошипа 6, на стойке 3 закреплен двухугловой кулачок 8 и с возможностью поворота посажен корпус 9, в котором в свою очередь с возможностью поворота относительно его продольной горизонтальной оси установлено плечо 10 механической руки с захватным устройством 11 и с подпружиненным пружиной 12, относнтель но двухуглового кулачка 8, роликом 13, На основании 1 укреплены регулируемые упоры 14 и 15, взаимодействующие с корпусом 9 в кра-йних точках его пово
