У///Ж ///
Фи2.1
1
Изобретение относится к машиностроению, а более конкретно к устройствам д-чя сборки или укладки с применением промышленных роботов.
Целью изобретения является повыше- ние надежности центрирования посредством выполнения центрирующего механизма в виде пары двуплечих рычагов.
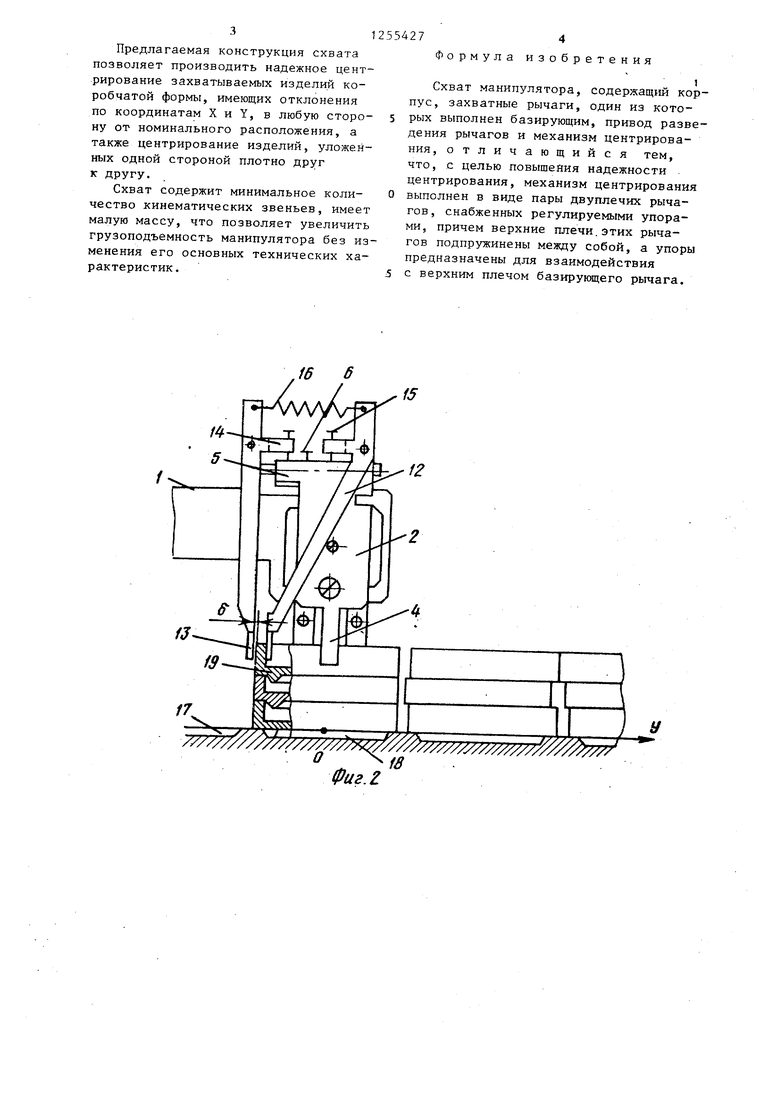
На фиг. 1 показан схват манипулятора, общий вид; на фиг. 2 - то же, вид сбоку (рычаги сведены); на фиг.З то же, рычаги разведены.
Схват содержит корпус 1, на котором укреплены захватные рычаги 2 и 3 с зажимными губками 4 и верхними пле чами 5 с регулируемыми упорами 6. Рычаги 2 и 3 стянуты между собой пружиной 7, обеспечивающей надежный зажим захватываемого изделия по координате X. Регулируемые упоры 6 ограничивают величину разведения губок 4 захвата. Один из рычагов 2, являющийся базовым, связан с корпусом 1 пружиной 8 растяжения и снабжен регулируемым упором 9, который обеспечивает настройку точного базирования захватываемого изделий по оси X.
Привод разведения рычагов пред-- ставляет собой пневмокамеру (не показана), образованную полостью корпуса 1 и ограниченную двумя мембранами .10, с которыми взаимодействуют два штока 11, укрепленные на захватных рычагах 2 и 3,
Механизм центрирования представляет собой пару двуплечих рычагов 12 с губками 13.I
Верхние плечи 14 рычагов 12 снабжены регулируемыми упорами 15,, стянуты между собой пружиной 16 и расположены над верхним плечом 5 базового рычага 2. При этом регулируемые упоры 15 под действием пружины 16 постоянно опир аются на верхнюю плоскость плеча 5 базового рычага 2. Максимальный мо1.,ент сил, создаваемый пружиной 16 в точке крепления пружины 8 на рычаге 2, должен быть меньше минимального момента сил, создаваемого пружиной 8 в той же точке (без.учета силы пружины 7), Это условие обеспечивает надежную работу схвата.
Схват манипулятора работает следущим образом.
Схват перемещают в зону кассе- ты 17, в ячейках 18 которой наход.ят- ся стопы изделий 19, имеющие произвольные отклонения от центров яче
s 0 5
5
0
5
0
5
0
272
ек в направлении осей X, Y. .Схват устанавливают над центром ячейки. В пневмокамеру подают сжатый воздух, который давит на мембраны 10, а они в свою очередь - на BITOKH., связанные с рычагами 2 и 3. Рычаги 2 и 3 разводятся до тех пор, пока их упоры 6 не опустятся до соприкосновения с корпусом 1. Причем первоначально отводится рычаг 3 как менее нагруженный. После остановки рычага 3 отводится базовый рычаг 2, при этом его плечо 5 опускается вместе с упорами 15 рычагов 12, которые под действием пружины 16 разводятся в стороны. Схват .опускают на изделие 19, при этом губки 4 охватывают габарит изделия 19 по оси X, а губки 13 охватывают стенку изделия 19 по оси Y, после чего сжатый воздух отключают, и пневмокамера сообщается с атмосферой. Рычаги 2 и 3 под действием пружин 7 и 8 начинают сводиться. Первоначально сводится базовый рычаг 2 как наиболее нагруженный, смещая изделие 19 к центру по оси X. При этом его плечо 5 поднимается и, воздействуя на упоры 15, сводит губки 13 рычагов 12, которые смещают изделие 19, центрируя его по оси Y. Базовый рычаг 2 сводится до ограничения упора 9 стенкой корпуса 1, после чего рычаг 2, а вместе с ним и рычаги 12 останавливаются. При этом губки 13 рычагов 12 охватывают стенку изделия 19 с некоторым гарантированным зазором Б, например 0,02 мм (в зависимости от поля допуска на стенку изделия и требуемой точности центрирования) . Регулировка центрирования изделия 19 по оси Y и величины зазора 8 производится с помощью регулируемых упоров 15. Далее заканчивается сведение рычага 3, который своей губкой 4 смещает изделие 19 к губке базового рычага 2 и зажимает его с усилием пружины 7. При этом гарантиро- BafjHbm зазор S не препятствует смещению, изделия по оси X.
Зажатое центрированное изделие 19 схват поднимает и переносит на рабочую позицию, например, автоматической линии (не показана). Схват останавливают над гнездом и опускают, захватные рычаги и рычаги механизма центрирования разводят выше описанным образом, и деталь остается в гнезде автоматической линии. Далее цикл повторяется.
31
Предлагаемая конструкция схвата позволяет производить надежное центрирование захватываемых изделий коробчатой формы, имеющих отклонения по координатам X и Y, в любую сторону от номинального расположения, а также центрирование изделий, уложенных одной стороной плотно друг к другу.
Схват содержит минимальное количество кинематических звеньев, имеет малую массу, что позволяет увеличить грузоподъемность манипулятора без из менения его основных технических характеристик.
554274
Формула изобретения
1
Схват манипулятора, содержащий корпус, захватные рычаги, один из кото5 рых выполнен базирующим, привод разведения рычагов и механизм центрирования, отличающийся тем, что, с целью повышения надежности центрирования, механизм центрирования
О выполнен в виде пары двуплечих рычагов, снабженных регулируемыми упорами, причем верхние плечи.этих рычагов подпружинены между собой, а упоры предназначены для взаимодействия
5 с верхним плечом базирующего рычага.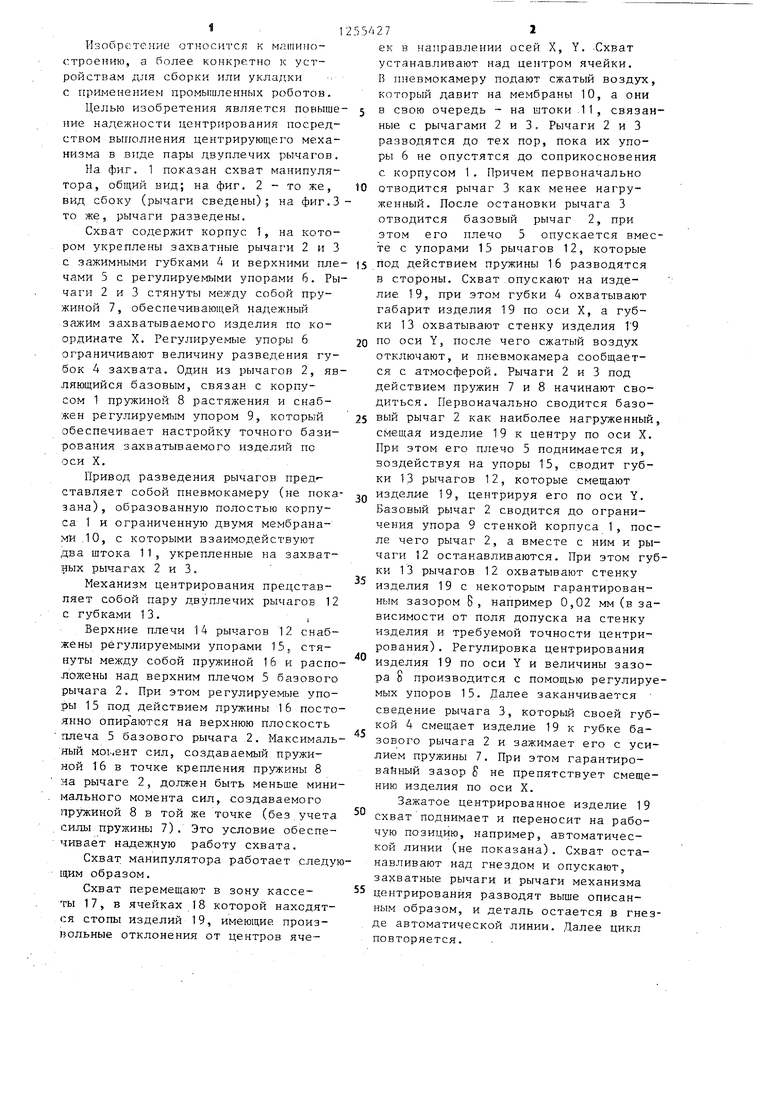
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват робота | 1990 |
|
SU1761463A1 |
| Захватное устройство | 1984 |
|
SU1220794A1 |
| Групповой схват | 1986 |
|
SU1333576A1 |
| Схват | 1983 |
|
SU1119842A1 |
| Манипулятор для извлечения отливок | 1985 |
|
SU1308426A1 |
| Схват | 1981 |
|
SU975391A1 |
| Схват манипулятора | 1990 |
|
SU1756145A1 |
| Схват | 1985 |
|
SU1289679A1 |
| Грузозахватное устройство | 1990 |
|
SU1736899A1 |
| Устройство для ориентации манипулятора | 1979 |
|
SU831616A1 |
Изобретение относится к устройствам для сборки или укладки с применением промышленных роботов. Целью изобретения является повышение надежности центрирования детали. На корпусе 1 установлены захватные рычаги 2 и 3, из которых рычаг 2 является базовым. Механизм центрирования пред ставляет собой пару двуплечих рыча- ; гов 12, которые стянуты между собой пружиной 16 и снабжены упорами 15, причем эти упоры контактируют с верхним плечом базового рычага 2. Таким образом, при работе схвата сначала происходит базирование по оси X рыча гом 2, а затем центрирование по осиУ рычагами 12, что повышает надежность центрирования. 3 ил. 8 -A/wwyy - (Л J 7 15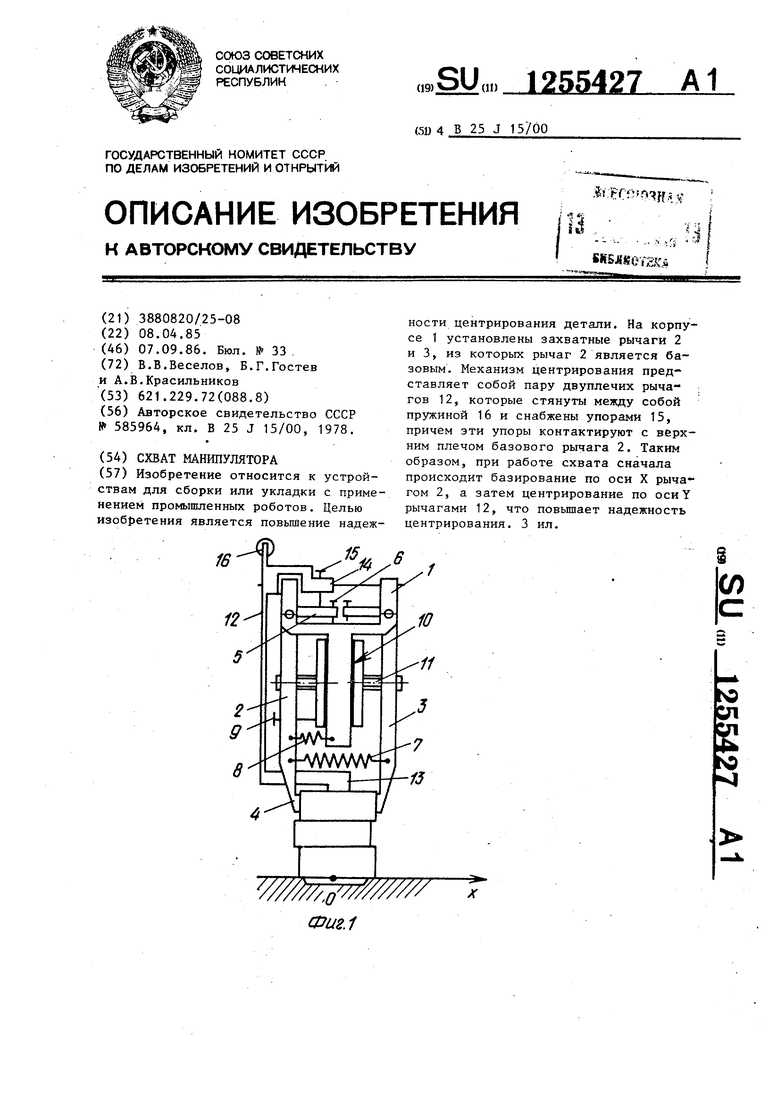
Л Фиг. г
15
у//////у/у9////////////// fff Фиг. J
Редактор О.Юрковецкая
Составитель А.Гаврюшик
Техред В.Кадар . Корректор В.Бутяга
4764/18
Тираж 1031Подписное
ВНИИЩ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35,, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул,Проектная, 4
| Схват манипулятора | 1975 |
|
SU585964A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
