1
Изобретение относится к машиностроению, а именно к прикладной механике, и может быть использовано в конструкциях манипуляторов, загруночных устройствах.
Наиболее близко к изобретению по технической сущности и достигаемому результату устройство для перемещения объекта по заданному закону, содержащее привод, вал, установленный на нем пазовый кулачок, корпус, размещенные в нем толкатели с роликами взаимодействукшими с пазом кулачка
1.
Однако функциональные возможности устройства из-за невозможности обеспечения смены позиций толкателей и их перемещений по заданному для i каждой позиции закону ограничены.20
Цель изобретения - расширение функциональных возможностей устройства.
Поставленная цель достигается тем, что устройство снабжено обгонной муфтой, один элемент которой жестко свя-/5 зан с валом, а другой - с пазовым кулачком, дисковой муфтой, связывающей кулачок с корпусом, и механизмом прерывистого вращения, соединяющим привод с корпусом.30
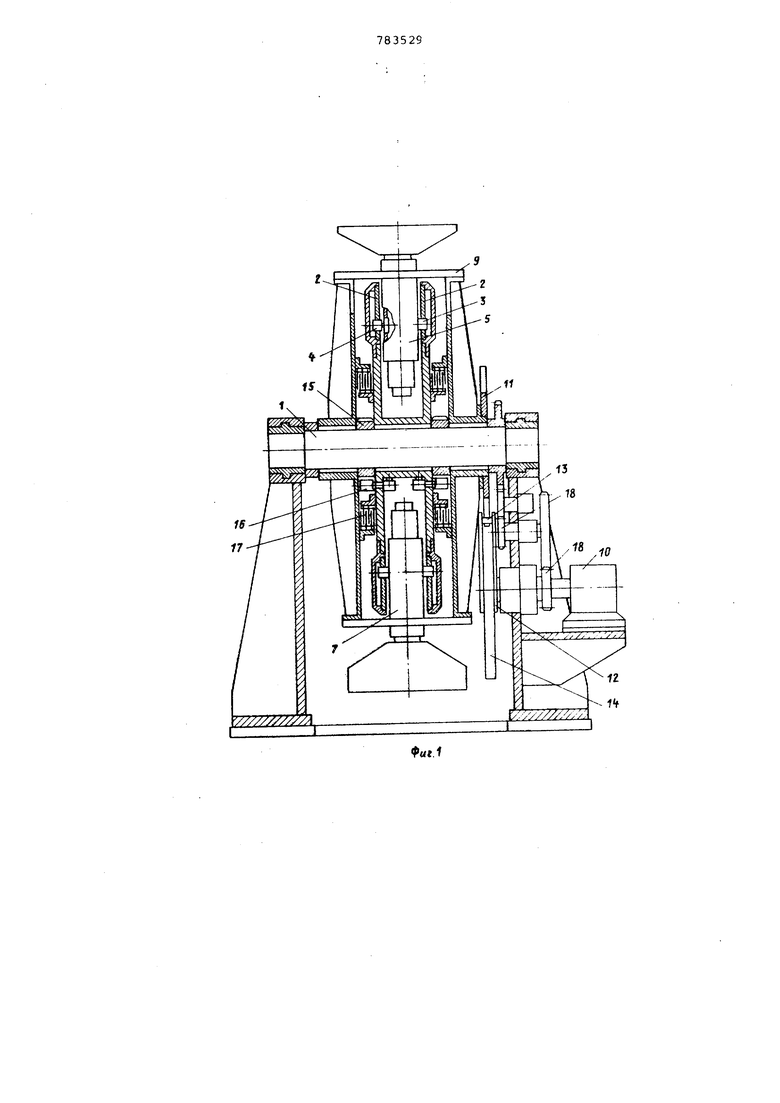
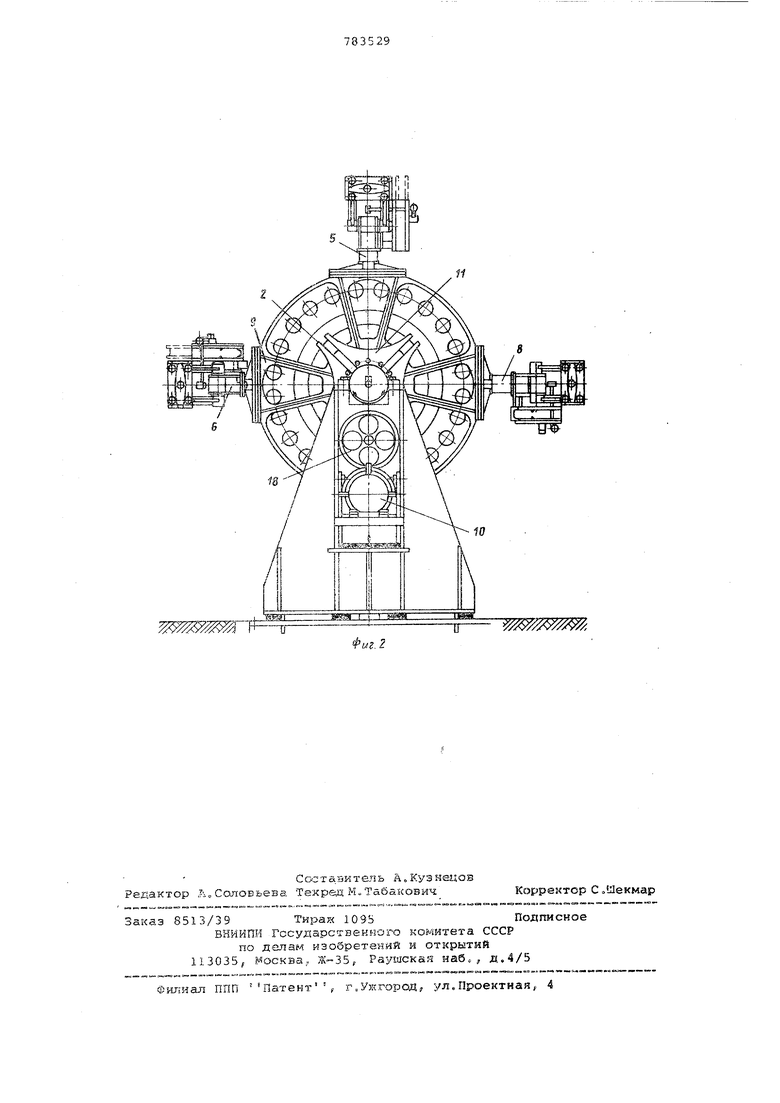
На фиг.1 изображено устройство, общий вид; на фиг.2 - то же, вид
сбоку.
Устройство содержит смонтированный на валу 1 пазовый кулачок 2, в пазу которого установлены взаимодействующие с КИМ ролики 3 и 4 каждого из толкателей 5, 6, 7, 8, расположенных в корпусе 9, кинематически соединенном с приводом 10 при помощи механизма прерывистого вращения, например мальтийского механизма, содержащего мальтийский крест 11 и водило 12 с роликом 13, связанное с запорной шайбой 14.
Между кулачксм 2 и приводом 10 установлена обгонная муфта, выполненная в виде храпового механизма, включающего закрепленное на валу 1 храповое колесо 15 и собачку 16, ось которой закреплена на кулачке 2.
Корпус 9 связан с кулачком 2 посредством дисковой муфты трения, имеющей диски 17. Привод 10 кинематически связан с валом 1 зубчатой передачи 18.
Устройство работает следующим образом.
При включении привода 10 одновре.менно получают вращение водило 12
маильтийского креста 11 и через эубча тую передачу 18 вал 1 с закрепленным на нем храповым колесом 15,
Кулачок 2 получает вращение через храповое колесо 15 и собачку 16,, связанную с кулачком 2, при этом корпус 9 и мальтийский крест 3.1 зафккси 3о ваны запорной шайбой 14, Происходит перемещение толкателей 5, б, 7, 0 по эгздакным законам (соответствующие;, например, разгрузке оборудования).
При дальнейшем вращении приводка 3.0 ролик 13 водила 12 входит а паз мальтийского креста 11, поворачивая мальтийский крест 11 и скрепленный с ним корпус 9 с толкателями на заданный угол.
При этом происходит смена позиций толкателей 5, 6, 7, 8, Так как в начальный момент поворота мальтийского креста 11, а, следовательно и соединенного с ним корпуса 9 с толкатвпями угловая скорость их вращения меньше постоянной угловой скорости вращения вала 1 с храповым колесом 15f то в этот период кулачок 2 получает вращение от храпового колеса 15 через собачку 16,при этом происходит проскальзывание дисков 17 дисковой г-гуфть трения ,
Причем кулачок 2 с собачкой 16 поворачивается на больший угол, чем корпус с тoлкaтeля ш 5, 6, 7, 8. Разница меящу углами их поворота в этот образует часть угла перебега собачки 16 .
Затем угловая скорость вращения мальтийского креста 11 становится выше угловой скорости вращения кулачка 2, при этом корпус 9 с помощью . дисков трения 17 увлекает за собой кулачок 2, проскальзывания дисков 17 не происходит, а собачка 16 проскакивает по зубьям храпового колеса 15.
В конце поворота ролик 13 водила 12 выходит из паза мальтийского креста 11, мальтийский крест останавливается и фиксируется запорной шайбой 14, вращающейся совместно с
ВО.ДИЛОм 12,
После остановки корпуса 9 с толкате.пями 5, 6, 7, 8 (произошла смена позиций) храповое колесо 15, продолжая вращаться с постоянной угловой
скоростью, входит в зацепление с собачкой 16 и приводит во врашение кулачок 2, при этом происходит проскальзывание дисков 17 дисковой муфты трения, и толкатели перемещаются по заg данным законам (соответствующим, например, загрузке оборудования),
Обеспечение перемещения любого из толкателей на каждой из позиций по определенному закону происходит за
0 счет того, что при смене позиций, т.е. при повороте корпуса 9 с толкателями кулачок 2 поворачивается вместе с ними без относительного перемещения, а по возвращении каждого из толкателей на исходную позицию ролики 3 и 4 буэ дух находиться на исходных участках профиля кулачка 2,
Предлагаемое устройство может быть х спользовано в конструкциях многопозиционных манипуляторов, для обслужи6 вания нескольких позиций технологического оборудования с одновременной передачей обрабатываеьых изделий с одной позиции на другую.
Применяя предлагаемое устройство
J можно одновременно производить выгрузку и загрузку деталей на нескольких станках и передавать их от одного станка к другому.
Формула изобретения
Устройство для перемещения объекта по заданному закону, содержащее привод, вал, установленный на нем пазовый кулачок, корпус, размешенные в нем толкатели с роликами, взаимодействующими с пазом кулачка, о т личающеес я тем, что, с целью расширения функциональных воз0 можностей, оно снабжено обгонной муфтой, один элемент которой жестко связан с валом, а другой - с пазовым кулачком, дисковой г(уфтой, связывающей кулачок с корпусом, и механизмом
прерывистого вращения, соединяющим привод с корпусом.
Источники информации, принятые во внимание при экспертизе 1. Артоболевский И,И, Механизмы
Q в современной технике, т,4, 1975, c,61f (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ДРОССЕЛЬНЫЙ КЛАПАН С АВТОМАТИЧЕСКИМ ОТКЛЮЧЕНИЕМ | 1993 |
|
RU2079027C1 |
| ПЕЧАТНО-ОТМЕТОЧНАЯ МАШИНА | 1968 |
|
SU210186A1 |
| Механизм для прерывистого вращения рабочего объекта | 1978 |
|
SU1010360A1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ИЗДЕЛИЙ ПРЕИМУЩЕСТВЕННО В МНОГОРЯДОВНЫЕ КАССЕТЫ | 1989 |
|
RU2013899C1 |
| Манипулятор | 1989 |
|
SU1673430A1 |
| АВТОМАТ ДЛЯ ДВУСТОРОННЕЙ ВЫСАДКИ ДЕТАЛЕЙ СТЕРЖНЕВОГО ТИПА | 1971 |
|
SU307841A1 |
| МНОГОШПИНДЕЛЬНЫЙ ТОКАРНЫЙ СТАНОК | 1973 |
|
SU363588A1 |
| Швейный полуавтомат для изготовления прямых петель | 1968 |
|
SU649765A1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПРЕРЫВИСТОЕ ВРАЩАТЕЛЬНОЕ И ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ | 1999 |
|
RU2180946C2 |
| Устройство для подачи длинномерного материала в зону обработки | 1983 |
|
SU1199376A1 |