(54) 3;iL-BATOP
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм управления приводом сбрасывателя штучных изделий с подающего органа | 1985 |
|
SU1414734A1 |
| Устройство для непрерывной намотки на катушки нитеобразных материалов | 1972 |
|
SU448903A1 |
| Полочный элеватор | 1980 |
|
SU874514A1 |
| Устройство для загрузки контейнеров изделиями | 1989 |
|
SU1705190A1 |
| Установка для ассортиментного комплектования контейнеров лотками с хлебобулочными изделиями | 1974 |
|
SU552945A1 |
| Устройство для нарезания зубьев у гребней и расчесок | 1958 |
|
SU116542A1 |
| Устройство для перегрузки изделий | 1983 |
|
SU1181968A1 |
| Устройство для нанесения строительных растворов | 1974 |
|
SU711255A1 |
| ПОДЪЕМНИК ДЛЯ ПРЯМОЛИНЕЙНЫХ ЛЕСТНИЧНЫХ МАРШЕЙ | 2012 |
|
RU2509711C2 |
| Устройство для укладки и упаковки листового стекла в тару | 1980 |
|
SU933549A1 |
1
Изобретение относится к транспортировке и хранению грузов, в частности к элеваторам.
Известны элеваторы для транспортирования контейнеров, содержанлие раму, концевые звездочки, огибающие их бесконечно замкнутые цепи, и прикрепленные к ним шарнирно контейнеры 1.
В этих элеваторах недостаточно эффективно используется его полезный объем, поскольку для соблюдения условия прохождения контейнеров через концевые звездочки расстояние между контейнерами увеличено.
Известны также элеваторы, включаюпдие раму, верхние и нижние концевые звездочки, огибающие их две бесконечно замкнутые тяговые цепи, соединенные между собой поперечными штангами, направляющие смонтированные параллельно вертикальному участку цепей, контейнеры для грузов, и устройство для их перевода с одной ветви элеватора на другую 2.
Цель изобретения - увеличение полезного объема элеватора.
Это достигается тем, что устройство для перевода контейнеров снабжено подпружиненными рычагами и выполнено в виде верхних и нижних роликовых спусков, yctaHOBленных перед концевыми звездочками, и наклонных направляющих, причем часть роликов, образующих верхний роликовый спуск и расположенных в зоне грузоподъемной ветви элеватора, закреплена на подпружиненных рычагах, при этом щтанги снабжены роликами, а на поверхностях контейнеров, обращенных к направляющим, смонтированы расположенные по вертикали консольно закрепленные ролики для поддержания контейнеров в ориентированном относительно направляющих положений.
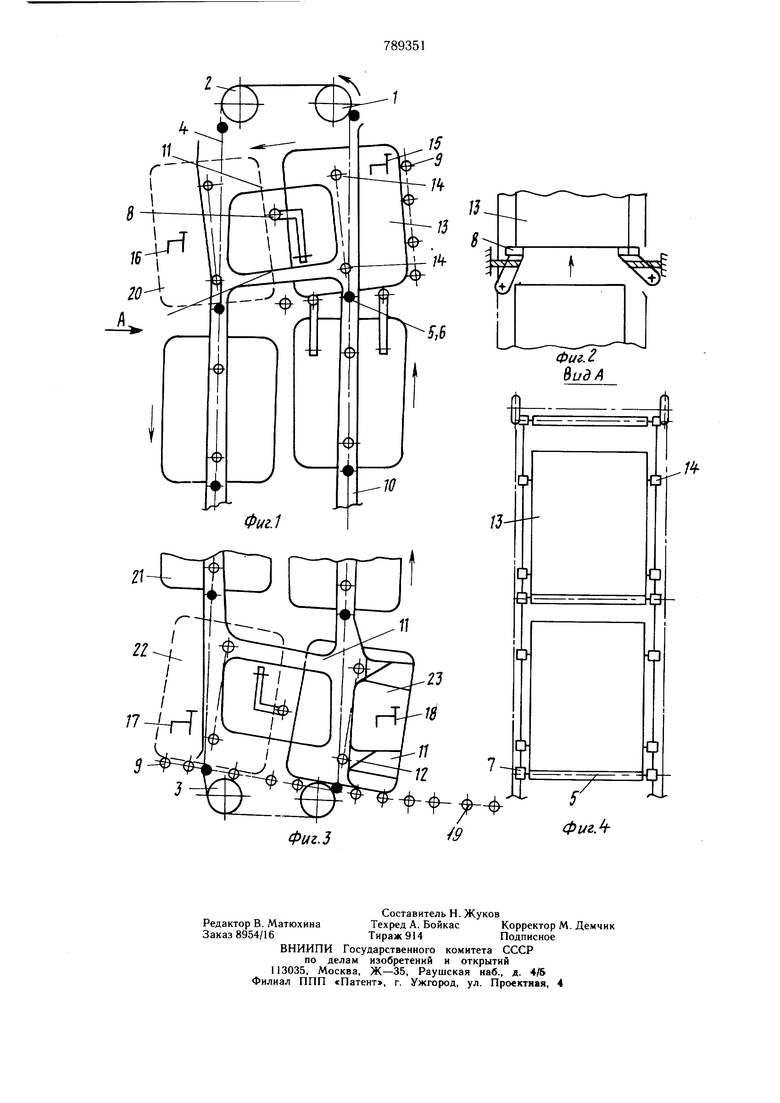
На фиг. 1 изображен верхний роликовый спуск, общий вид; на фиг. 2 - подпружиненные консольно закрепленные ролики в верхнем спуске; на фиг. 3 - нижний роликовый
15 спуск у нижних концевых звездочек и загрузочная площ.адка; на фиг. 4 - вид по стрелке А на фиг. 1.
Элеватор содержит приводные звездочки 1, отклоняющие 2, натяжные 3, две замкнутые цепи 4 с запасованными между ними щтангами 5, на которые посажены ролики 6, а также короткие ролики 7, подпружиненные консольные ролики 8 и прямые 9, вертикальные направляющие 10 и наклонные 11, заслонки 12 в наклонных направляющих, контейнеры 13 с установленными на их торцах один Над другим по два ролика 14, выключатели 15-18 и загрузочную площадку 19, а также контейнеры 20-23. Элеватор работает следующим образом, В исходном положении в нижнем роликовом спуске отсутствует контейнер 22 и находится контейнер 23, на верхнем роликовом спуске отсутствует контейнер 20 и до него частично не дощел контейнер 13. При остановленном приводе цепей контейнер 23 замыкает выключатель 18, который включает привод цепей. Звездочки 1 перемещают цепи 4 с запасованными щтангами 5, на ролики 6 которых свободно опираются контейнеры. Контейнер в элеваторе ориентируется с помощью роликов 14, а штанги - с помощью роликов 7, взаимодействуя с направляющими. Контейнер 13 проходит подпружиненные консольные ролики 8, опирается на ролик 6 штанги 5, подпружиненные консольные ролики 8 и замыкает выключатель 15. Последний отключает привод цепей. Контейнер 13 перемещается по верхнему роликовому спуску и ориентируется с помощью роликов 14 в наклонных направляющих 11, занимает свободное место контейнера 20. Контейнер 20 опирается на ролик 6 штанги 5, ориентируется в элеваторе роликами 14 и подпружиненными роликами 8 и замыкает выключатель 16. Последний включает привод цепей. Освободившаяся щтанга из-под контейнера 13 за три цикла обходит звездочки 1 и 2 и становится в верхний роликовый спуск для приема контейнера 20. Контейнер 21 занимает свободное место контейнера 22, освободившаяся ранее штанга которого за цикл обходит звездочки 3 и становится в нижний роликовый спуск у нижних концевых звездочек для приема контейнера 23. Контейнер 22 замыкает выключатель 17, который отключает привод цепей. Контейнер 22 перемещается по нижнему роликовому спуску, занимает освободившееся место контейнера 23 и замыкает выключатель 18. Далее цикл повторяется. При подъеме контейнер 23 опирается на ролик 6 щтанги 5 и ориентируется в элеваторе роликами 14 и подпружиненными роликами 8. В зависимости от его конструкции и хранимого груза в нем при отключенном приводе цепей контейнер 23 загружается, находясь на месте и удерживаясь заслонками 12 или на загрузочной площадке 19. В предлагаемом элеваторе полезное использование объема в два раза больше, чем в известных, и составляет более 60%. Это достигается за счет уменьшения размеров между контейнерами как по горизонтали, так и по вертикали. Формула изобретения Элеватор, включающий раму, верхние и нижние концевые звездочки, огибающие их две бесконечно замкнутые тяговые цепи, соединенные между собой поперечными щтангами, направляющие, смонтированные параллельно вертикальным участкам цепей, контейнеры для грузов, и устройство для их перевода с одной ветви элеватора на другую, отличающийся тем, что,.с целью увеличения полезного объема элеватора устройство для перевода контейнеров снабжено подпружиненными рычагами и выполнено в виде верхних и нижних роликовых спусков, установленных перед концевыми звездочками, и наклонных направляющих, причем часть роликов, образующих верхний роликовый спуск и расположенных в зоне грузоподъемной ветви элеватора, закреплена на подпружиненных рычагах, при этом штанги снабжены роликами, а на поверхностях контейнеров, обращенных к направляющим, смонтированы расположенные по вертикали консольно закрепленные ролики для поддержания контейнеров в ориентированном относительно направляющих положении. Источники информации, принятые во внимание при экспертизе 1.Патент США № 3972412, кл. 198-138, опублик. 1976. 2.Пертен Ю. А. Механизация и автоматизация складов щтучных грузов. Л., 1972, с. 61, рис. 23 б (прототип).
