Изобретение относится к технологическому оборудованию для различных отраслей промышленности и может быть использовано в исполнительных устройствах манипуляторов, работающих совместно с листогибочными машинами.
Известно устройство для контроля прикладываемой нагрузки к промышленному роботу (см. пат. Японии N 4-13118, МПК В 25 J 19/06, 1992 г.). В этом устройстве производится контроль неподвижного состояния силового передаточного вала. Известно предохранительное устройство для машин с программным управлением, которое отключает привод при перегрузке (см. пат. Германии N 297891, МПК В 25 J 19/06, 1992 г.).
Наиболее близким к заявляемому устройству является очувствленный кистевой сустав робота (SU 1569233 A1, В 25 J 19/00 07.06.90), используемый при силомоментном очувствлении роботов, на различных технологических операциях механообработки. Известное устройство содержит центральный вал и корпус исполнительного механизма, связанные между собой упругим элементом, имеющим горизонтальный и вертикальный участки, захват, а также датчики смещения упругого элемента. Датчики смещения установлены на горизонтальном и вертикальном участках упругого элемента. Данное устройство формирует электрические сигналы, характеризующие нагрузку на захват (силу или момент), ее величину и направление действия. При этом упругие элементы воспринимают всю внешнюю нагрузку.
Размещение аналоговых датчиков, например тензометрических, как в данном устройстве, непосредственно на упругом элементе снижает надежность и долговечность устройства. Это связано с деформацией датчиков при воздействии нагрузок на манипулятор.
В современных листогибочных машинах, применяемых в судостроении, нагрузки на манипуляторы, поддерживающие края листа, составляют от 1000 H до 200 кН. Столь широкий диапазон усилий затрудняет применение измерительных устройств подобного типа для слежения за деформацией краев листа в процессе гибки.
Задача настоящего изобретения заключается в повышении надежности, долговечности и нагрузочной способности кисти манипулятора.
Указанный результат достигается тем, что в известной кисти манипулятора, содержащей захват, центральный вал и корпус исполнительного механизма, связанные между собой упругим элементом, имеющим горизонтальный и вертикальный участки, а также датчики смещения упругого элемента, упомянутые датчики выполнены в виде индукционных датчиков, расположенных в корпусе с зазором между рабочей поверхностью датчика и упругим элементом, имеющим L-образную форму, а захват имеет возможность поворота в ортогональной системе координат и связан с центральным валом, на котором установлен кулачок, жестко связанный с упругим элементом и размещенный в корпусе с зазором, составляющим от 0,2 до 0,8 зазора между упругим элементом и рабочей поверхностью датчика.
Известны тяжелонагруженные соединения зацеплением, например, шпоночные или плоская пята, однако зазоры в них назначаются из условия обеспечения сборки или препятствия заклиниванию при относительном перемещении деталей.
В изобретении зазор в передаче зацеплением назначается из условия обеспечения взаимодействия упругого элемента с индукционными датчиками.
Предлагаемое устройство способно не только воспринимать большие величины внешних нагрузок, но и может определять направления, по которым они прилагаются.
Совокупность указанных существенных признаков изобретения обеспечивает достижение технического результата, который выражается в повышении нагрузочной способности кисти манипулятора.
В самом деле, нагрузочная способность повышается за счет того, что внешняя нагрузка в основном воспринимается соединением кулачок - корпус, то есть осуществляется передача зацеплением. Надежность устройства повышается за счет определенной заранее величины зазора между кулачком и корпусом, такой, что при взаимодействии упругого элемента с индукционными датчиками отсутствует механический контакт.
Величины зазоров между упругим элементом и рабочей поверхностью датчика (h) и между кулачком и корпусом (S) выбирают из соотношения S = 0,2-0,8 h. При этом, если величина зазора S будет менее 0,2 h, устройство теряет чувствительность из-за того, что перемещения концов упругого элемента будут недостаточны для переключения датчиков. Если величина зазора S будет больше 0,8 h, то станет возможным механический контакт упругого элемента с рабочими поверхностями датчиков.
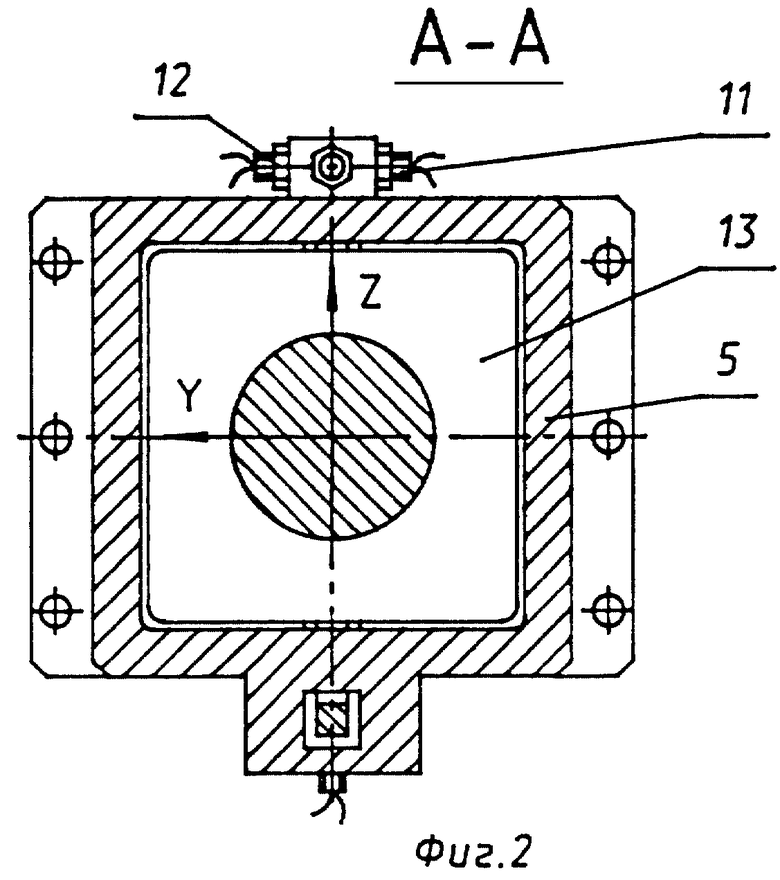
Сущность изобретения поясняется чертежами, где на фиг. 1 изображен общий вид кисти манипулятора в разрезе, а на фиг. 2 - сечение А-А.
Кисть манипулятора с силовым очувствлением состоит из захвата 1, установленного на оси 2, подшипникового узла 3 с центральным валом 4, корпуса 5, упругого элемента 6, связанного с центральным валом 4 и корпусом 5, и индукционных датчиков 7-12. На центральном валу 4 установлен кулачок 13, жестко связанный с упругим элементом 6, имеющим L-образную форму. Датчики 7-12 установлены в корпусе 5 так, чтобы расстояние от упругого элемента 6 до рабочей поверхности В датчиков было равно величине h. Кулачок 13 установлен в корпусе 5 с зазором S, выбранным из условия S = 0,2- 0,8 h.
Кисть манипулятора с силовым очувствлением работает следующим образом. В исходном положении датчики 7-12 включены.
Ролик листогибочной машины (см. "Гибочно-правильные станки и машины - прорыв в ресурсосбережении и экологичности процессов формообразования листов и профилей", научно-технический сборник "Эврика", М., Информтехника, 1996 г. ) деформирует лист, поддерживаемый за края по крайней мере тремя манипуляторами, каждый из которых снабжен кистью с силовым очувствлением. При простом поддержании листа, под действием весовой нагрузки, кулачок 13 смещается в корпусе 5, зазоры S и h выбираются и происходит выключение датчиков 7 и 10. В процессе деформации листа в плоскости ZX край листа загибается, и происходит перекладка зазоров S и h, включаются датчики 7 и 10, а датчики 8, 9 выключаются и формируют управляющий сигнал на соответствующие привода манипулятора, смещающие кисть вдоль осей соответственно Z и X до тех пор, пока снова не выключатся датчики 7 и 10, отключающие привода манипулятора. Аналогично осуществляется гибка листа в плоскости ZY, при этом задействованы датчики 9-12.
После снятия нагрузки упругий элемент 6 возвращает кулачок 13 в исходное положение.
Таким образом обеспечивается работа манипуляторов в следящем режиме и, кроме того, с них снимаются дополнительные технологические нагрузки, возникающие при деформации листа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОНТАЖА СУДОВОГО ВАЛОПРОВОДА | 1991 |
|
RU2031055C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ГИБОЧНО-ПРАВИЛЬНАЯ МАШИНА | 1997 |
|
RU2129929C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ СЛОЖНЫХ ПОВЕРХНОСТЕЙ ДЕТАЛЕЙ | 1992 |
|
RU2038926C1 |
| СПОСОБ ФОРМООБРАЗОВАНИЯ ГНУТЫХ ЛИСТОВЫХ ДЕТАЛЕЙ И ГИБОЧНО-ПРАВИЛЬНАЯ МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2191082C2 |
| ГИБОЧНО-ПРАВИЛЬНЫЙ СТАНОК | 1993 |
|
RU2102170C1 |
| УСТРОЙСТВО ДЛЯ ЭКРАНИРОВАНИЯ РЕЖУЩЕЙ ДУГИ И ЗАЩИТЫ ПЛАЗМОТРОНА | 1996 |
|
RU2106945C1 |
| СПОСОБ МОНТАЖА СУДОВОГО ВАЛОПРОВОДА | 1994 |
|
RU2092380C1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ПЛАЗМЕННОЙ ГОЛОВКИ | 1991 |
|
RU2083337C1 |
| ПРИЖИМНАЯ ОСНАСТКА ДЛЯ ПРИКЛЕИВАНИЯ ПОКРЫТИЯ ИЗ ЭЛАСТИЧНЫХ ПЛАСТИН НА ТЕЛА ВРАЩЕНИЯ (ВАРИАНТЫ) | 1995 |
|
RU2107000C1 |
| ВИНТОВАЯ СТЯЖКА-РАСПОРКА | 1990 |
|
RU2011633C1 |
Изобретение относится к технологическому оборудованию и может быть использовано в исполнительных устройствах манипуляторов, работающих совместно с листогибочными машинами. Кисть манипулятора состоит из захвата, центрального вала, корпуса, упругого элемента L-образной формы и индукционных датчиков смещения упругого элемента. Вал снабжен кулачком, жестко связанным с упругим элементом. Датчики установлены так, чтобы расстояние от упругого элемента до рабочей поверхности датчика было равно величине h. Кулачок установлен в корпусе с зазором S, выбранным из условия: S = 0,2-0,8 h. Под действием внешней нагрузки кулачок смещается в корпусе, зазоры S и h выбираются и происходит переключение датчиков, которые формируют управляющий сигнал на соответствующие приводы манипулятора, смещающие кисть вдоль осей X, Y и Z. В результате обеспечивается повышение надежности, долговечности и нагрузочной способности кисти манипулятора. 2 ил.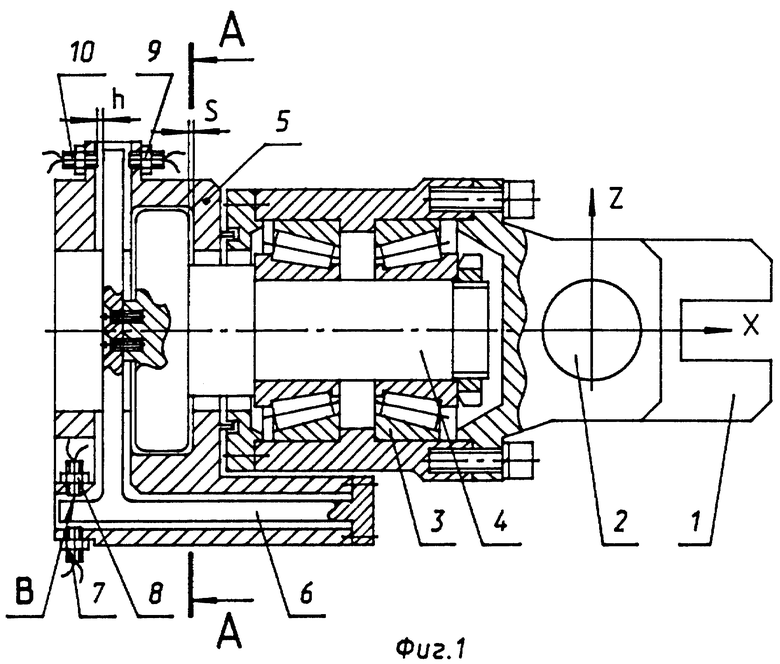
Кисть манипулятора с силовым очувствлением, содержащая захват, центральный вал и корпус исполнительного механизма, связанные между собой упругим элементом, имеющим горизонтальный и вертикальный участки, а также датчики смещения упругого элемента, отличающаяся тем, что датчики смещения упругого элемента выполнены в виде индукционных датчиков, расположенных в корпусе с зазором между рабочей поверхностью датчика и упругим элементом, имеющим L-образную форму, а захват имеет возможность поворота в ортогональной системе координат и связан с центральным валом, на котором установлен кулачок, жестко связанный с упругим элементом и размещенный в корпусе с зазором, составляющим от 0,2 до 0,8 от величины зазора между упругим элементом и рабочей поверхностью датчика.
| Очувствленный кистевой сустав робота | 1985 |
|
SU1569233A1 |
| Очувствленное запястье руки робота | 1985 |
|
SU1355486A1 |
| Очувствленное запястье манипулятора | 1984 |
|
SU1308466A1 |
| DE 3813708 A1, 17.11.1988 | |||
| DE 3623391 A, 14.01.1988 | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |

