(54) УСТРОЙСТВО ДЛЯ АДРЕСОВАНИЯ ПОДВИЖНОГО ОБЪЕКТА
1
Устройство относится к автоматизации торгового и подъемно-транспортного оборудования и, в частности, к устройствам управления стеллажными шта%елерами.
Известно устройство для адресования подвижных объектов (ПО), содержащее задающие контакты, контакты датчиков положения и реле совпадения обеспечивающее подачу команды на остановку l.
Недостаткомэтого устройства является отсутствие замедления ПО пег ред остановкой, что приводит к неточному адресованию.
Наиболее близко по технической сущности и достигаемому результату к предлагаемому устройство для адресования ПО, содержащее задающие ключи (ЗК), и датчики адреса (ДА), с замыкающими, размыкающими и переключающими контактами, датчик стробирования, подключенный к цепи пораз рядного сравнения (ЦПС) состояний контактов ЗК и ДА, соединенной .с шиной совпадения, и шины замедления (ШЗ) за один адрес до заданного. ДаН ное устройство позволяет получить, кроме команды остановки, по одной предварительной команде за один адрее до заданного при ПО в каждом из направлений, что достаточно при адресовании на относительно .низких скоростях порядка 40-80 м/мин C2J.
Однако при автоматическом адресовании стеллажных штабелеров с высокими скоростями, достигающими 150300 м/мин, необходимо обеспечить
0 произвольное число команд на остановку за один, два, три, четыре и т. д. адреса, что позволило бы получить многоступенчатое замедление ПО перед его остановкой. Таким современ5ным требованиям, связанным с резким повышением производительности штабелеров, данное устройство не удовлетворяет. В нем не предусмотрено также автоматическое определение на-
0 правления требуемого перемещения, что снижает степень автоматизации.
Цель изобретения - расширение функциональных возможностей путем обеспечения многоступенчатого замедле5 .ния ПО в функции пути.
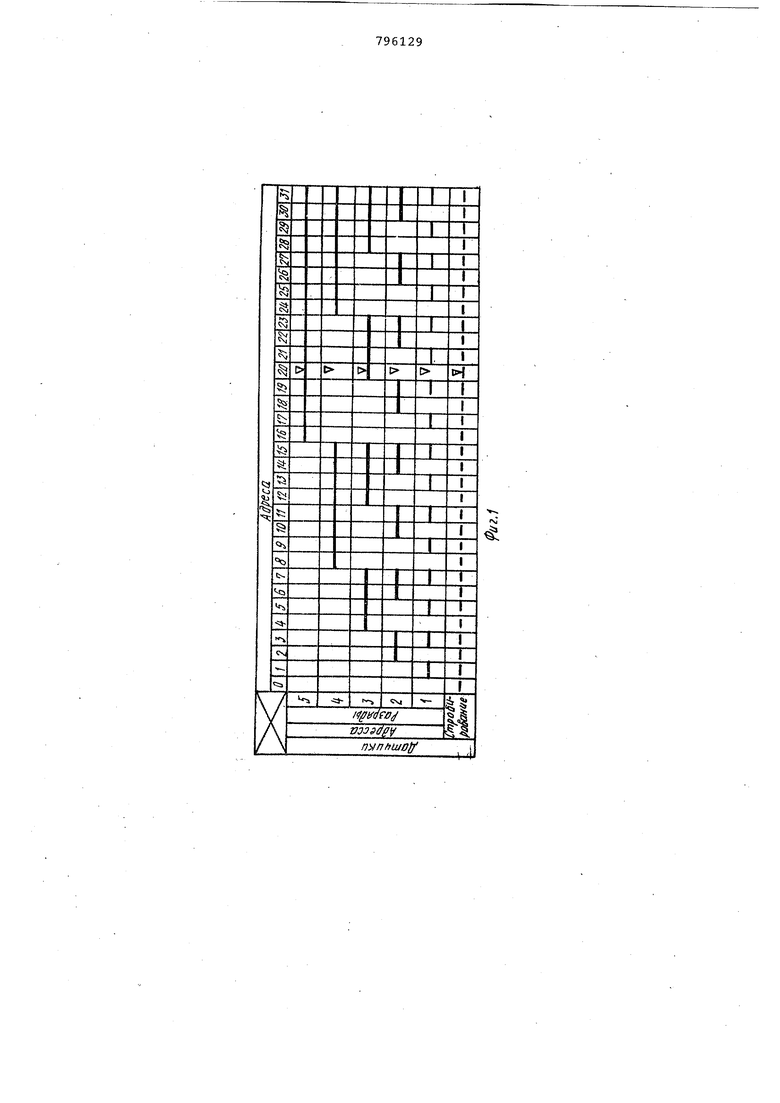
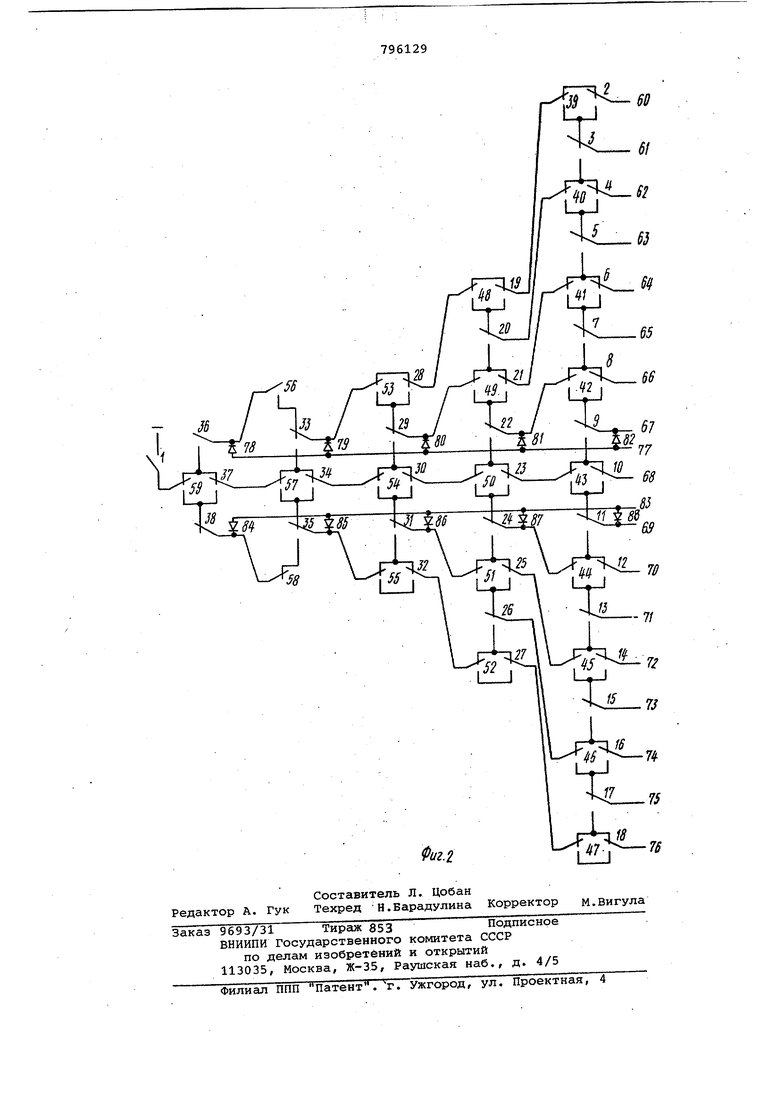
поставленная цель достигается тем, что в каждом разряде размыкающий контакт одного из ЗК подключен к замыкающим контактам одного из ДА и второго ЗК, замыкающий контакт пер0вого ЗК подключен к размыкающим кон тактам второго ДА и третьего ЗК, а переключающие контакты первого и по следующих по отношению к ЦПС ЗК одного и того же разряда соединены с переключающими контактами соответственно первого и последующий по отношению к указанной -цепи ДА, следующего младшего разряда, причем пе реключающие контакты задающих ключе низшего разряда соединены с ШЗ за один и более адресов до заданного. Кроме того, переключающие контак ты первых по отношению к ЦПС ЗК сое динены через диоды с-соответствующими движения объекта в направлении возрастания и убывания ад ресов . На фиг„ 1 показаны условно ДА и датчик стробирования, связанного с ПО, находящимся у двадцатого адреса и воздействующие на них элементы, расположенные в двоичном коде соответственно тридцати двум адресам н фиг, 2 принципиальная электрическая схема устройства. Устройство содержит замыкающий контакт 1 датчика стробирования, подключенный к отрицательному полюс источника электропитания ЗК 2, 3,.4 5,б, 7, 8, 9, 10, 11, 12, 13, 14, 15, 16, и 18 первого (низшего)разря да, 19, 20, 21, 22, 23, 24, 25, 26, и 27 второго разряда 28, 29, 30, 31 и 32 третьего разряда, 33, 34, и 35 четвертого разряда и 36., 37 и 38 пятого (высшего) разряда, контак ты ,ЦА 39, 40, 41, 42, 43, 44, 45, 46, и 47 первого (низшего) разряда, 48, 49, 50, 51 и 52 второго разряда, 53, 54 и 55 третьего разряда, 56, 57 и 56 четвертого разряда и 59 пятого (высшего) разряда. ЦПС состояний контактов ЗК и ДА образована контактами ДА и ЗК 59, 37, 57, 3.4, 54, 30, 50, 23, 43 и 10. Устройство выполнено в виде двухмерной однородной структуры, содержащей однотипную схемную ячейку, многократно повторяющуюся в разных раз рядах (по горизонтали) и в одном из тех же разрядах {по вертикали) . Размыкающие контакты ЗК 2, 4, 6,8, 10, 12, 14, 16, 18, 19, 21, 23, 25, 27, 28, 30, 32, 34 и 37 соединены с размыкающими контактами ДА 39-55, 57 и 59 того лее разряда соответственно, а их размыкающие части - с размыкающими частями указанных контактов-ДА. Размыкающие контакты ЗК 3, 5, 7, 9, 11, 13, 15, 17, 20, 22, 24, 26, 29 и 31 подключены к замыкающим контактам ДА 39-46, 48-51, 53 и 54 того же разря да и ЗК 2, 4, 6, 8, 10, 12,14, 16, 19, 21, 23, 25, 28 и 30 соответстве но, а их замыкакядие контакты -, к размыкающим контактам ДА 40-47, 4954 и 55- того же разряда и ЗК 4, б. 8, 10, 12, 14, 16, 18, 21, 23, 25, 27, 30 и 32 соответственно. ШЗ 60, 61, 62, 63, 64, 65, 66 и 67 ПО при движении последнего по воз- растающим адресам подключены к переключающим контактам ЗК 2-9 соответсвенно, шина совпадения 68 - к переключающему контакту ЗК 10, а ШЗ 69, 70, 71, 72, 73, 74, 75 и 76 ПО при движении последнего по убывающим адресам - к переключающим контактам ЗК 11-18 соответственно. ШЗ 67 и 69, 66и70, 65 и 71 f 64и72, 63и73, 62 и 74, 61 и 75, 60 и 76 предназначены для подачи команды на замедление за 1-8 адресов до заданного соответственно. Переключающие контакты первого, второго, третьего, четвертого и т. д. ЗК одного и того же разряда, считая от ЦПС в обе стороны, соединены с переключающими контактами соответственно первого, второго, третьего и четвертого и т. д, ДА следующего младшего разряда, считая от ЦПб в те же стороны соответственно. Например, переключающие контакты ЗК 19-27 второго разряда соединены указанным образом с переключающими контактами ДА 39-47, т. е. контакт ЗК 22 соединен с контактом ДА 42, 24 - с 44, 21 с 41, 25 - с 45 и т. д. Переключающие контакты первого, второго, треть его, четвертого и т, д. ЗК, считая от ЦПС в обе стороны, первого (низшего) разряда соединены с ШЗ соответственно за один, два, три, четыре и т. д. адреса до заданного при движении ПО по возрастающим и убывающим адресам, т. е. переключающий контакт ЗК 9 соединен с шиной 67, 8 с 66, 7 - с 65, 6 - с 64, 11 С 69, 12- с 70, 13 - с 71 и 14 с72 и т. д. ШЗ 6,7, 66, 65, 64 и т. д. за 1, 2, З, 4, и т, д. адреса до заданного при движении ПО повозрастающим адресам подключены симметрично ШЗ 69, 70, 71, 72 и т. д, за1, 2, 3, 4ит. д. адреса до заданного при движении ПО по убывающим адресам. Шина 77 движения ПО в направлении возрастания адресов подключена через диоды 78, 79, 80, 81 и 82 к переключающим контактам ЗК 36, 33, 29, 22 и 9 соответственно, являющимся первыми переключающими контактами ЗК всех разрядов, считая от ЦПС. Шина 83 движения ПО в направлении убывания адресов подключена симметрично через диоды 84, 85, 86, 87 и 88 к переключающим контактам, ЗК 38, 35, 31, 24 и 11 соответственно. Работа устройства описана для случая, если задан адрес 20, а ПО находится у адреса 2. Из фиг. 1 видно, что при этом контакты ЗК 2-18, 19-27, 33-35, первого, второго и четвертого разрядов будут выключены, а контакты ЗК 28-32, 36-38, третьего и пятого разрядов - включены. Контакты ДА 39-47, 53-59, первого, третьего, четвертого и пятого разрядов будут выключены, а контакты ДА 48-52 второго разряда - включены. Отрицательный полюс источника питания при замыкании контакта 1 датчика стробирования через контакты ДА 59, ЗК 36 и диод 78 подается на шину 77 движения ПО в направлении возрастани awpedoB, что используется для автоматического пуска привода в необходи мом направлении,- при этом ни на одну из ШЗ 60-76 напряжение не подается, так как ПО находится далее, чем за 8 адресов до заданного. При прохождении ПО у адресов 3-19 каждый раз при включении контакта 1 датчика стробирования будет включаться шина 77 движения в том же направлении. При прохождении ПО у адресов 3-11 ШЗ 60-76 будут выключены. Когда ПО передвинется к адресу 12, окажутся выключенными контакты ДА 39-47, 4852 |и 59 первого, второго и пятого разрядов и включенными - контакты ДА 53-55, 56-58 третьего и четвертого разряда. При замыкании контакта 1 датчика стробирования минус источника электропитания через контакты ДА и ЗК 59, 36, 56, 33, 53, 28, 48, 19, 39 и 2 подается на ШЗ 60 ПО за 8 адресов до заданного при движении по возрастающим адресам. Когда ПО передвинется к следующему адресу 1.3, по цепи контактов ДА и ЗК 59, 36, 56 33, 53, 28, 48, 19, 39 и 3 включится ШЗ 61 ПО за 7 адресов до заданног Далее при прохождении ПО у адресов 14-19 включается ШЗ 62-67 за 6, 5, 4 3, 2 и 1 адрес до заданного соответственно. У адреса 20 включается шина 68 зовпадения, а шина 77 уже не вклю .. При противоположном направлении движения устройство работает аналогично, но при этом вместо шин 77, 60-67 включаются шины 83, 69-7.6.. ШЗ 60-67, 69-76 служат для многоступенчатого изменения (в рассматриваемом примере - для уменьшения) скорости ПО в.функции пути, шина 68 для остановки ПО. Рассмотренный прим выполнения устройства соответствует 32 адресам с ШЗ за 1-8 адресов до за данного, однако число адресов и числ указанных ШЗ может быть произвольным Например, для увеличения числа адре сов до 128 при тех же восьми ШЗ рассмотренный пример следует дополнить еще двумя разрядами, содержащими всего по 6 контактов. Устройство обеспечивает возможнос задания произвольного числа предвари тельных команд замедления в функции пути при абсолютной системе отсчета, что позволяет значительно повысить основные скорости позиционирований и за счет этого повысить производительность автоматизированного подъемно-транспортного оборудования, в особенности на крупных вы-. сотных автоматизированных складах с протяженными трассами перемещения стеллажных штабелеров. Формула изобретения 1.Устройство для адресования подвижного объекта, преимущественно стеллажного штабелера, содержащее задающие ключи и датчики адреса с замЫ. кающими, размыкающими и переключающими контактами, датчик стробирования, подключенный к цепи поразрядного сравнения состояний контактов задающих ключей и датчиков гщреса, соединенной с шиной совпадения, и шины замедления за .один адрес до заданного, отличающееся тем, что, с целью расширения функциональных возможностей пуТем обеспечения многоступенчатого замедления объекта в функции пути, в каждом разряде размыкающий контакт одного из задающих ключей подключен к замыкающим контактам одного из датчиков адреса и второго задающего ключа, замыкающий контакт первого ключа подключен к размыкающим контактам второго датчика адреса и третьего задающего ключа, а переключающие контакты первого и последующих по отношению к цепи поразрядного сравнения задающих ключей одного и того же разряда соединены с переключающими контактами соответственно первого и последующих по отношению ft указанной цепи датчиков адреса следующего младшего разряда, причем переключающие контакты задающих ключей низшего разряда соединены -с шинами замедления за один и более адресов до заданного. 2.Устройство по п. 1, отличающееся тем, что переключающие контакты первых по отнсяиению к цепи поразрядного сравнения згщающих ключей соединены через диоды с соответствующими шинами движения объекта в направлении возрастания и убывания адресов. Источники информации, принятые во внимание при экспертизе 1. Срибнер Л А., Шраго Л. К. Кодовые датчики положения в системах программного управления металлорежущими станками. Киев, Техника, 1968, с.. 142-144, рис. 63. 2 . Авторское свидетельство СССР № 330083, кл. В 65 G 37/40, 27.02.70 (прототип).
