Изобретение представляет собой управляемый тормоз для лебедок (подъемных механизмов), выполненный в виде колодки или ленты, прижимаемых к тормозному шкиву. В производственной практике известны тормозы, в которых тормозящий элемент, колодка или лента прижимаются к тормозному шкиву под воздейс-пвием груза или пружины и отводятся вследствие физических усилий рабочего, что требует значительной затраты физического груда для растормаживания механизма. Помимо этого в таких тормозах отсутствует пропорциональность между моментом-, создаваемым тормозом, и крутящим моментом, подлежащим торможению, что имеет место в так называемых грузо. упорных тормозах.
В предлагаемом управляемом тормозе этот недостаток устранен тем, что тормозная колодка или лента укреплена неподвижно, а тормозной шкив смонтирован «а водиле, которое шарнирно связано с одним из валов лебедки. Тормозной шкив приводится во вращение при помощи жестко с ним связан|НОЙ соосной шестерни, взаимодействующей с зуб. чатым колесом, соосным с осью вращения водила, в виду чего усилие,
с которым тормозной шкив прижимается к тормозящему элементу, пропорционально рабочему крутящему моменту.
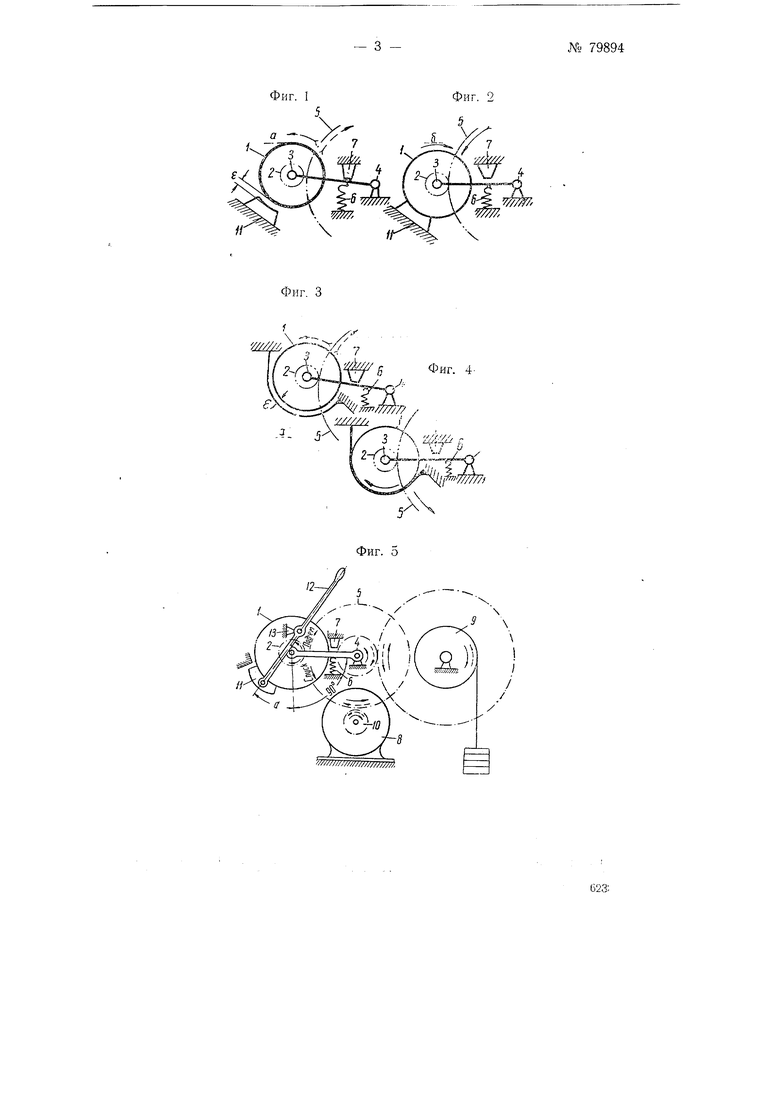
На фиг. 1 изображена принципиальная схема управляемого тормоза с колодкой при работе ла подъем груза; на фиг. 2-то же самое при работе на спуск груза; на фиг. 3 и 4-аналогичные схемы для тормоза с лентой; на фиг. 5 и 6 - фасад и план лебедки с применением тормоза с колодкой.
Тормозной шкив 1 со скрепленной с НИМ зубчатой шестерней 2 свободно вращается на оси 3. Ось 3 может в свою очередь несколько перемещаться 1ПО дуге окружности радиусом 3-4 относительно вала 4, на который насажено з бчатое колесо 5. Зубпы шест,е1р|Нн 2 всегда находятся в зацеплении с зубцамн колеса 5. Если вращается зубчатое колесо 5, то всегда от я,его вращается и шестерня 2, а с ней и тормозной шкив 1. Зубчатое колесо 5 является ведущим для шестерни 2.
Бели колесо 5 будет вращаться по часовой стрелке, то шестерня 2, находящаяся налево от колеса: 5, i6yдет, стремиться своей осью .В1ра щения перемещаться вверх, пока упор 7 не преградит эта перем;ещение.
621
В то же время д естврия 2 будет вращаться относительно своей оси вместе с тормозиьгм щкивом 1 так, что тормозной шиив при этом направлении вращения будет находиться на вevlичинy зазора. Е (фиг. 3) от сво,ей 1колодви (или ленты).
При Вращении зубчатото колеса против часовой стрелки щестерия 2 по1Д влияйиом иагоравлениого вниз усилия от давлении я зубьев колеса 5 будет перемещаться вниз и лрижиiMaiTb тарМозной шкив к тормозной колодке, причем, чем с больщей силой он будет прИЖИматьоя тем больше будет создаваться ypasHOiB-e:Щивающая 1сил:а трения на тор1мозном щкиве, т. е. будет иметь са1мотор.МОжвН ие. Опорная пружина 6, работающая на сжатие, уравяовещивает своим з силием только от собственного веса торМоэпого щкива 1 и щестерни 2.
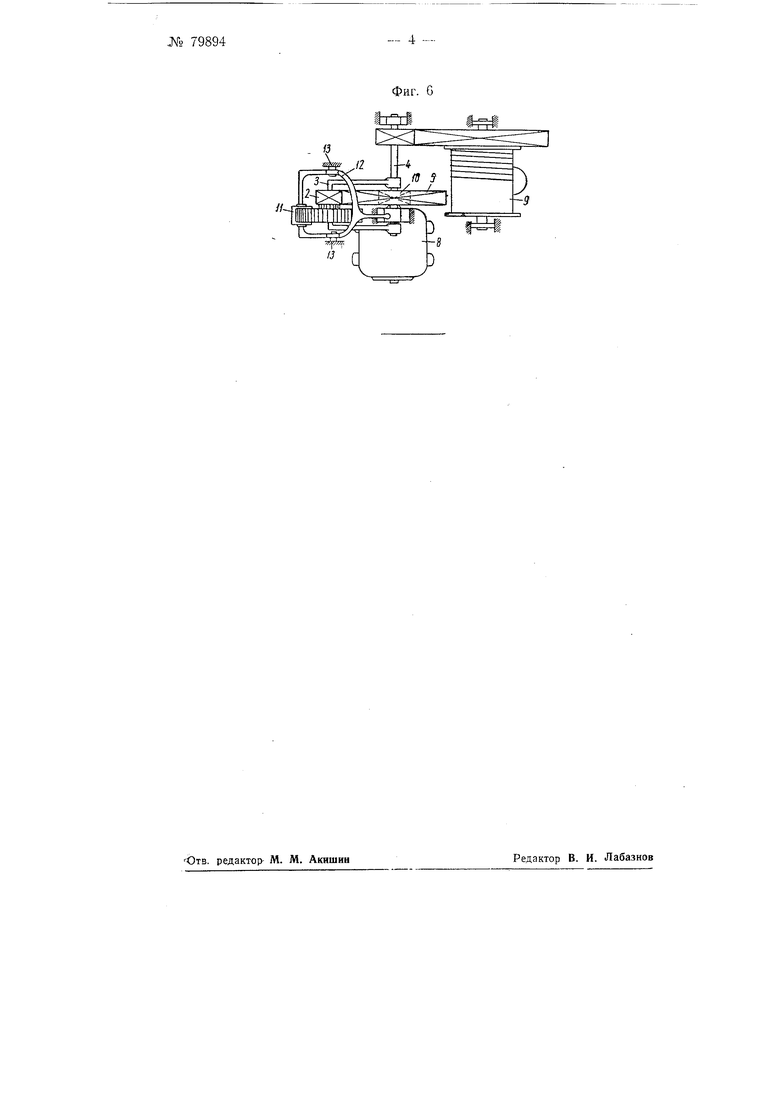
Представленная «а фиг. 5 и 6 конструкция лебедки выполнена следующим образом.
Подъем груза совершается мотором 8, который через передачи кинематически связан с грузовым канатным барабаном 9. Тормозной щкив / при помощи щестерни 2 связан с зубчатым колесом 5, с которым сцеплена также и щестерня 10, укрепленная на валу мотора 5.
В период подъема щестерня 2 и тормозной щкив / окружным усилием зубчатого колеса 5, вращающегося по часовой стрелке, приподним1аются до упора 7 так, что образуется достаточный зазор между трущимися поверхностями тормозного щкива / и колодки 11.
Как только закончится подъем, зубчатое колесо 5 начнет поворачиваться против часовой стрелки (что будет соответствовать началу спуска), и тормозной ЩКИБ окружным усилием колеса 5 на щестерню 2 будет прижиматься к тормозной колодке 77 и через определенный промежуток времени остановится.
Тормозная колодка // по отношению к линии, соединяющей центры 3 и 4 колес под углом 90°, может при помощи рычага 12, имеющего неподвижную ось вращения 13, перемещаться, меняя угол заклинивания а. Уменьшая угол к, можно достичь такого положения, что груз не остановится, а будет опускаться плавно с равномерной желаемой скоростью. Для остановки груза при спуске тормозную колодку ставят в исходное положение, увеличивая угол а до прежнего своего значения.
Управление рычагом 12 может производиться либо непосредственно от руки, либо при помощи тяг, либо при помощи электромагнита.
Предмет изобретения
1.Управляемый тормоз грузовой лебедки, заключающий в себе тормозной шкив и колодку, отличающийся тем, что, с целью использования его как грузоупорного тормоза, тормозная колодка неподвижно укреплена, а тормозной щкив смонтирован на водиле, щарнирно связанном с одним из валов лебедки, и приводится во вращение при помощи жестко с ним связанной соосной щестерни, взаимодей ствующей с зубчагым колесом, соосным с осью вращения водила.
2.Тормоз по (П. I, отличающ и- и с я тем, что, с целью возможности расторможения лебедки при спуске груза, осуществляемом путем отвода колодки от тормозного шкива, тормозная колодка укреплена на поворотном управляемом рычаге.
Фиг. I
| название | год | авторы | номер документа |
|---|---|---|---|
| Фрикционная лебедка с планетарным редуктором | 1975 |
|
SU537942A1 |
| Грузоупорный тормоз для лебедки | 1974 |
|
SU502838A2 |
| ГРУЗОУПОРНЫЙ ТОРМОЗ для ЛЕБЕДКИ | 1973 |
|
SU386833A1 |
| Путевое тормозное устройство для сортировочных горок | 1939 |
|
SU57457A1 |
| Грузоупорный тормоз | 1978 |
|
SU779293A1 |
| ЛОВ Скреперная двухбарабанная лебедка | 1961 |
|
SU142006A1 |
| Управляемый тормоз грузовой лебедки | 1986 |
|
SU1404449A1 |
| ЛЕБЕДКА | 1973 |
|
SU366147A1 |
| Канатный подъемно-транспортный агрегат | 1981 |
|
SU1164117A1 |
| Устройство для испытания прочности каната или проволоки по всей длине | 1937 |
|
SU54129A1 |
Фиг. 3
13
Фиг. б
