1
Изобретение относится к абразивной обработке и может быть использовано для шлифовки и полировки глазных контактных линз.
Известно устройство для обработки оптических деталей, содержащее станину со смонтированным на ней поворотным кронштейном, несущим шпиндель с опорным пальцем, установленный с возможностью осевого перемещения и связанный с подпружиненным штоком пневмоцилиндра . . .
Недостатком известной конструкции является то, что при сравнительно малых давлениях, обуславливаемых обработкой оптических деталей из органического материала, опорный палец шпинделя подвергается осевым колебаниям, приводящим к дефектам обработки.
Цель изобретения - повышение качества обработки.
Поставленная цель достигается тем что устройство снабжено размещенной на кронштейне и соединенной с корпусом пневмоцилиндра буферной емкостью и рычагом, один KOHeij которого связа со шпинделем, другой - шарнирно с кронштейном, а средняя часть - со штоком
пневмоцилиндра, при этом пружина штока расположена между введенными в устройство чашей и упором, закрепленньми соответственно на рычаге и штоке и несущими установленный на торце одного из них амортизирующий элемент .
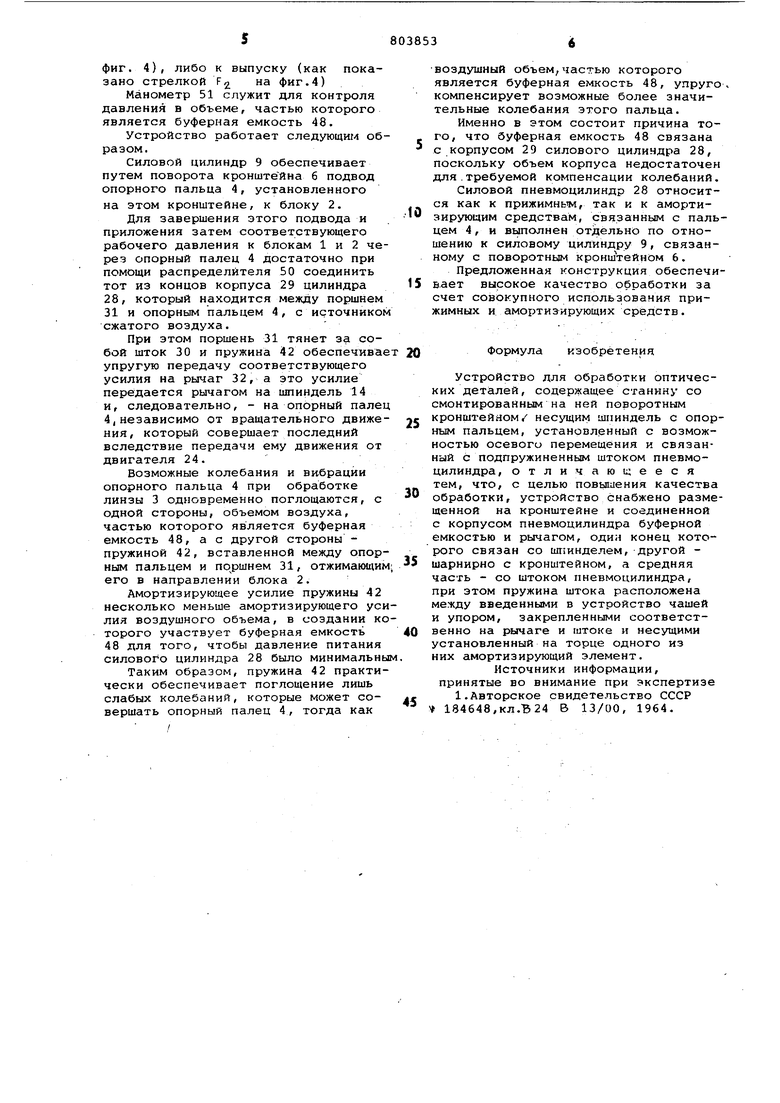
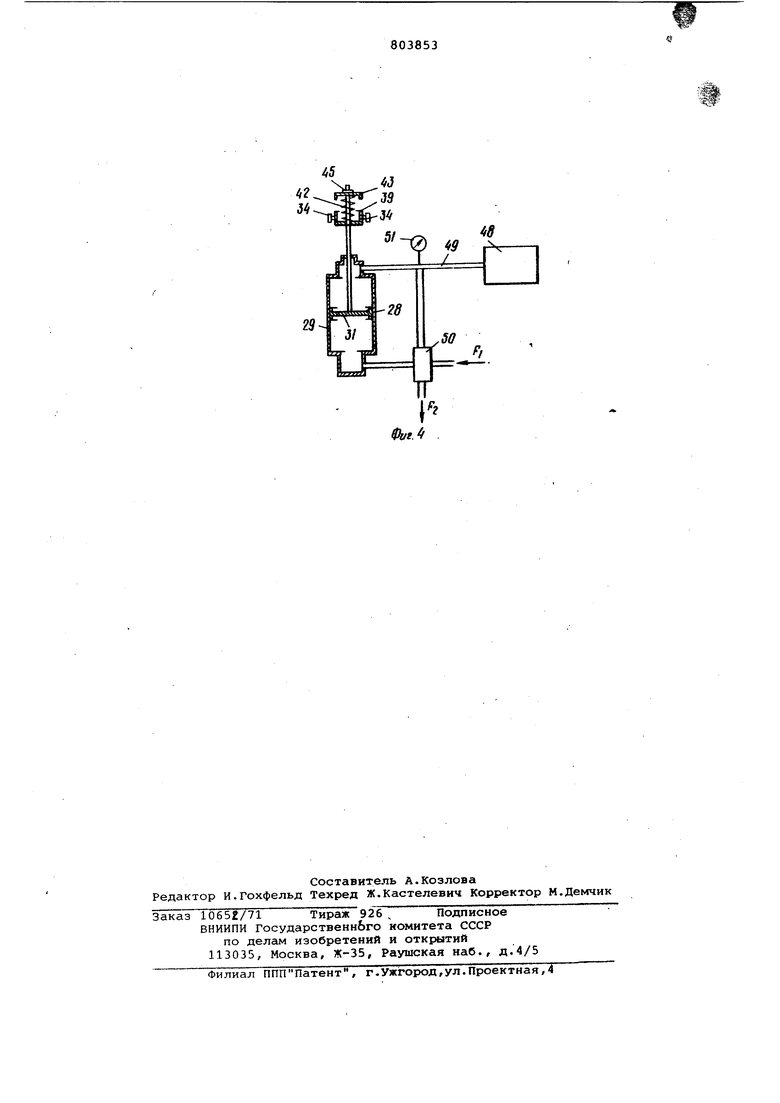
На фиг. 1 представлено устройство для обработки оптических деталей в разрезе; на фиг. 2 - разрез А-А фиг.1; на фиг. 3 - рахрез Б-Б фиг.1; на фиг. 4 - блок-схема, поясняющая работу прижимных и амортизирующих средств.
Устройство содержит два блока 1 и 2, между которыми устанавливают обрабатываемую линзу, при этом на блоке 1 может быть закреплена линза 3, тогда блок 2 является инструментом.
На блок 1 воздействует опорный палец 4 посредством оправки 5.
Опорный палец 4 установлен на кронштейне 6, поворачивающемся на валу 7, размещенном на станине 8.
С кронштейном 6 связаны средства для обеспечения его поворота на валу 7, содержащие силовой цилиндр 9, корпус которого установлен с возможностью поворота на кронштейне б, тогда как
го поршень шарнирно связан в точке 0 с консолью 11, являющейся частью танины 8.
Средства управления предназначены ля подводаопорного пальца 4 к правке 5.
Для фиксации кронштейна 6 в конце того движения подвода консоль 11 меет V -образный шип, с которым заимодействует паз 12 соответствуюей формы, выполненный на нижн(-й стооне консоли 13, связанной с кронтейном 6.
Опорный палец 4 установлен эксцентрично на шпинделе 14, установленном с вращением в гильзе 15, при этом на каждом конце гильзы между ней и шпинделем установлены подшипники 16.
Опорный палец может быть- запрессован во вставку 17, закрепленную на конце шпинделя 14, например, при помощи резьбы.
Подшипники 16, удерживающие в осевом направлении по отношению к шпинделю 14 упругими разрезными кольцами, вставленными в канавки последнего, обеспечивают неподвижность шпинделя в осевом направлении относительно гильзы 15, в которой он установлен с возможностью вращения за счет взаимодействия заплечиков на внутренней поверхности гильзы.
Гильза 15 установлена с возможностью осевого перемещения в трубчатом кожухе 18, связанном с кронштейном 6, в результате чего опорный палец 4 в свою очередь оказыва ется полностью подвижным в осевом направлении относительно этого кронштейна.
Кожух 18 вставлен в обойму 19, установленную на консоли 13, связанной со станиной 8, и фиксируется в этой обойме 19.
Кожух 18 имеет на внутренней поверхности палец 20, вставленный в продольную канавку. 21 гильзы 15, что препятствует вращению последней.
Шпиндель 14, несущий опорный палец 4, имеетна противоположном от пальца конце шлицевое продолжение 22, посредством которого он связан во вращении со шкивом 23, а на кронштейне б установлен двигатель 24 для приведения во вращение этого шкива. Практически двигатель 24 установлен на консоли 25, связанной с кронштейном 6, п бесконечный ремень 26 пропускается по шкиву 23 и по шкиву 27, сидящему на выходном валу двигателя 24.
С опорным пальцем 4 связаны прижимные средства для поджатия его в направлении блока 2, целиком установленные на кронштейне 6.
Эти средства содержат силовой пнеймоцилиндр 28, корпус 29 которого установлен на консоли 13, связанной
с кронштейном 6, и шток 30 поршня 31, воздействующего на опорный палец 4.
Шпиндель 14, несущий опорный палец 4, соединен с одним концом рычага 32, взаимодействующего своей средней частью с силовым пневмоцилиндром 28, а другим концом шарнирно связан со стойкой 33, соединенной с кронштейном 6.
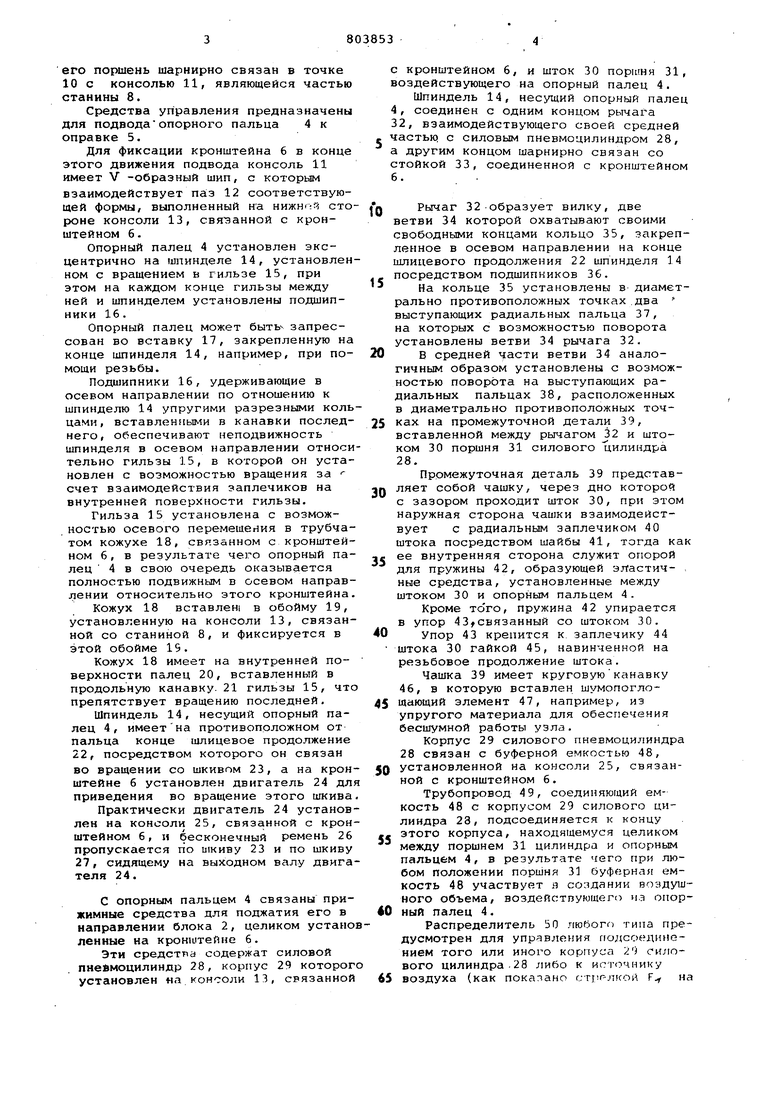
Рычаг 32-образует вилку, две ветви 34 которой охватывают своими свободными концами кольцо 35, закрепленное в осевом направлении на конце шлицевого продолжения 22 шпинделя 14 посредством подшипников 36.
На кольце 35 установлены в диаметрально противоположных точках два выступающих радиальных пальца 37, на которых с возможностью поворота установлены ветви 34 рычага 32.
в средней части ветви 34 аналогичным образом установлены с возможностью поворота на выступающих радиальных пальцах 38, расположенных в диаметрально противоположных точках на промежуточной детали 39,
вставленной между рычагом 32 и штоком 30 поршня 31 силового 1лилиндра 28.
Промежуточная деталь 39 представляет собой чашку, через дно которой с зазором проходит шток 30, при этом наружная сторона чашки взаимодействует с радиальным заплечиком 40 штока посредством шайбы 41, тогда как
ее внутренняя сторона служит опорой для пружины 42, образующей эластичные средства, установленные между штоком 30 и опорным пальцем 4.
Кроме того, пружина 42 упирается в упор 43fсвязанный со штоком 30.
Упор 43 крепится к заплечику 44 штока 30 гайкой 45, навинченной на резьбовое продолжение штока.
Чашка 39 имеет круговую канавку 46, в которую вставлен шумопоглощающий элемент 47, например, из упругого материала для обеспечения бесшумной работы .
Корпус 29 силового пневмоцилиндра 28 связан с буферной емкостью 48,
установленной на консоли 25, связанной с кронштейном 6.
Трубопровод 49, соединяющий емкость 48 с корпусом 29 силового цилиндра 28, подсоединяется к концу этого корпуса, находящемуся целиком
между поршнем 31 цилиндра и опорным пальцем 4, в результате чего при любом положении поршня 31 буферная емкость 48 участвует я создании воздушного объема, воздейстпующего на опорныя палец 4.
Распределитель 50 любогг/ типа предусмотрен для управления подсоединением того или иного корпуса 2J силового цилиндра.28 либо к источнику воздуха (как показано стрг-лкой F на
фиг. 4), либо к выпуску (как показано стрелкой F на фиг.4)
Манометр 51 служит для контроля давления в объеме, частью которого является буферная емкость 48.
Устройство работает следующим образом.
Силовой цилиндр 9 обеспечивает путем поворота кронштейна б подвод опорного пальца 4, установленного на этом кронштейне, к блоку 2.
Для завершения этого подвода и приложения затем соответствующего рабочего давления к блокам 1 и 2 через опорный палец 4 достаточно при помощи распределителя 50 соединить тот из концов корпуса 29 цилиндра 28, который находится между поршнем 31 и опорным пальцем 4, с источником сжатого воздуха.
При этом поршень 31 тянет за собой шток 30 и пружина 42 обеспечивае упругую передачу соответствующего усилия на рычаг 32, а это усилие передается рычагом на шпиндель 14 и, следовательно, - на опорный палец 4,независимо от вращательного движения, который совершает последний вследствие передачи ему движения от двигателя 24.
Возможные колебания и внбрацйи опорного пальца 4 при обработке линзы 3 одновременно поглощаются, с одной стороны, объемом воздуха, частью которого является буферная емкость 48, ас другой стороны пружиной 42, вставленной между опорным пальцем и поршнем 31, отжиманицим его в направлении блока 2.
Амортизирующее усилие пружины 42 несколько меньше амортизирующего усилия воздушного объема, в создании которого участвует буферная емкость 48 для того, чтобы давление питания силового цилиндра 28 было минимальны
Таким образом, пружина 42 практически обеспечивает поглощение лишь слабых колебаний, которые может совершать опорный палец 4, тогда как
воздушный объем,частью которого является буферная емкость 4В, упруго компенсирует возможные более значительные колебания этого пальца.
Именно в этом состоит причина того, что буферная емкость 48 связана с корпусом 29 силового цилиндра 28, поскольку объем корпуса недостаточен для.требуемой компенсации колебаний.
Силовой пневмоцилиндр 28 относится как к прижимньтм, так и к амортизирующим средствам, связанным с пальцем 4, и выполнен отдельно по отношению к силовому цилиндру 9, связанному с поворотным кронштейном 6.
Предложенная конструкция обеспечи5вает высокое качество обработки за счет совокупного использования прижимных и амортизирующих средств.
Формула изобретения
Устройство для обработки оптических деталей, содерзхащее станину со смонтированным на ней поворотным кронштейном/ несущим шпиндель с опорным пальцем, установленный с возможностью осевого перемещения и связанный 6 подпружиненным штоком пневмоцилиндра, отличаюидееся тем, что, с целью повышения качества обработки, устройство снабжено размещенной на кронштейне и соединенной с корпусом пневмоцилиндра буферной емкостью и рычагом, один конец которого связан со шгшнделем, другой шарнирно с кронштейном, а средняя часть - со штоком пневмоцилиндра, при этом пружина штока расположена между введенными в устройство чашей и упором, закрепленными соответственно на рычаге и штоке и несущими установленный на торце одного из них амортизирующий элемент.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР t 184648,КЛ.В24 В 13/00, 1964.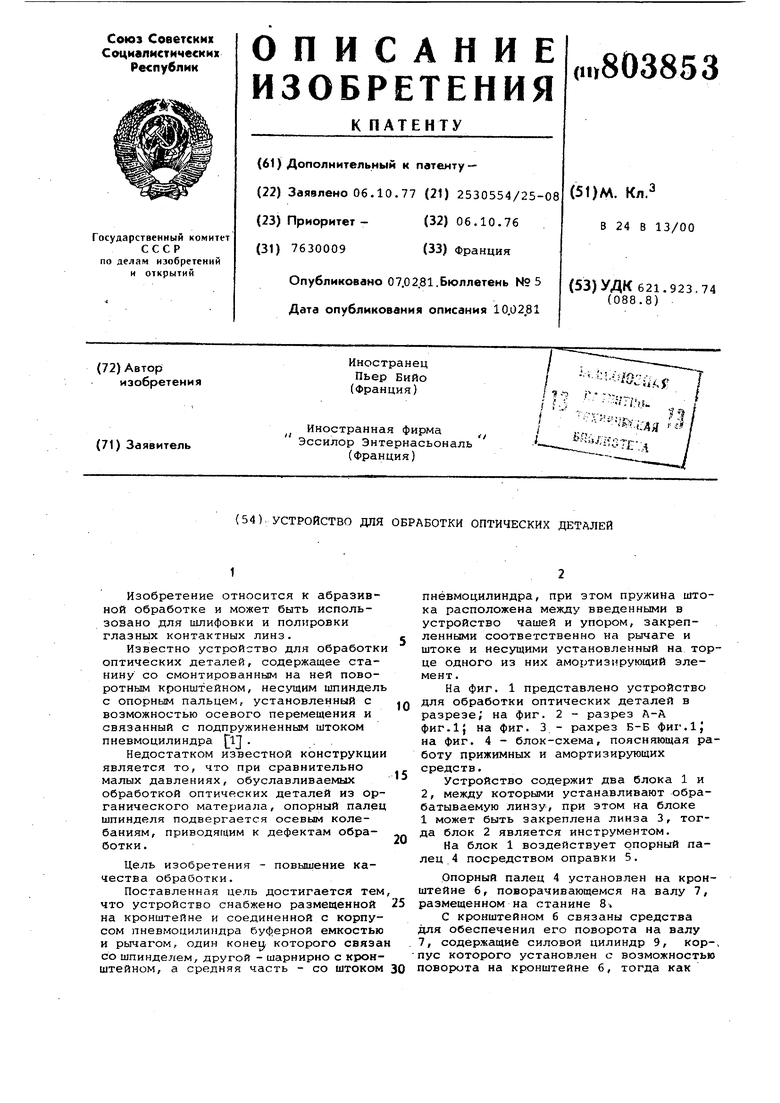
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для ротационной обработки давлением полых изделий | 1989 |
|
SU1639833A1 |
| Стенд для сборки траков гусеничной цепи | 1988 |
|
SU1549667A1 |
| Автомат для изготовления седлообразных катушек | 1977 |
|
SU736190A1 |
| ПРИВОД УПРАВЛЕНИЯ СЦЕПЛЕНИЕМ | 2007 |
|
RU2347695C1 |
| Станок для сгибания фигурных изделий | 1981 |
|
SU1028406A1 |
| Направляющее устройство для пруткового материала к токарным станкам | 1983 |
|
SU1114489A1 |
| Устройство для закатки обрезиненного корда | 1983 |
|
SU1100126A1 |
| Устройство для сборки корпусных деталей с комплектующими | 1988 |
|
SU1511042A1 |
| Многооперационное устройство сАВТОМАТичЕСКОй СМЕНОй иНСТРуМЕНТА | 1978 |
|
SU831487A1 |
| Устройство для намотки рулонного материала | 1985 |
|
SU1294736A1 |
4J
36
38
30фуг.2
6-6
II
Фиг.3
23
.
