(54) АВТООПЕРАТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Автооператор | 1983 |
|
SU1144839A1 |
| Автомат для подготовки электрических проводов к монтажу | 1986 |
|
SU1464232A1 |
| Автооператор | 1974 |
|
SU554129A1 |
| Двухместное захватное устройство | 1988 |
|
SU1516346A2 |
| Станок для шлифования плоских поверхностей деталей | 1988 |
|
SU1602710A1 |
| Схват | 1981 |
|
SU921852A1 |
| Швейный полуавтомат для изготовления прямых петель | 1968 |
|
SU649765A1 |
| Устройство для автоматической смены инструмента | 1977 |
|
SU657954A1 |
| Автомат для контроля деталей цилиндрической формы | 1986 |
|
SU1466815A1 |
| Захват для автоматической смены инструментальных оправок | 1978 |
|
SU703300A1 |
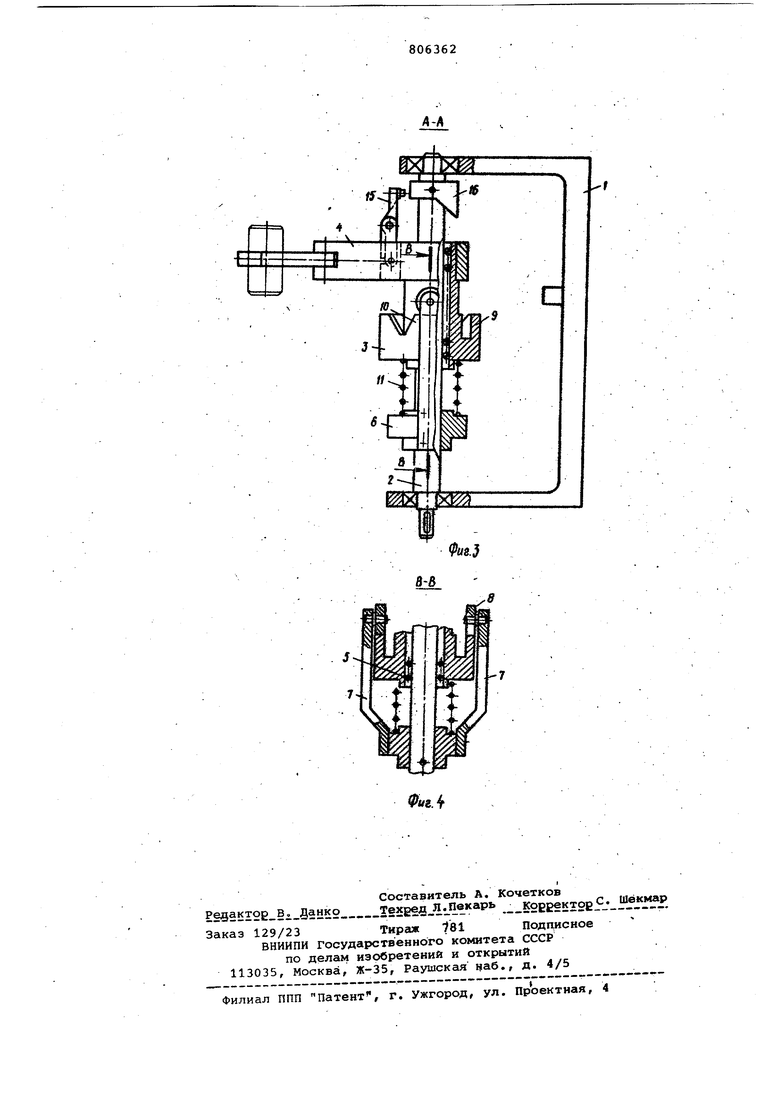
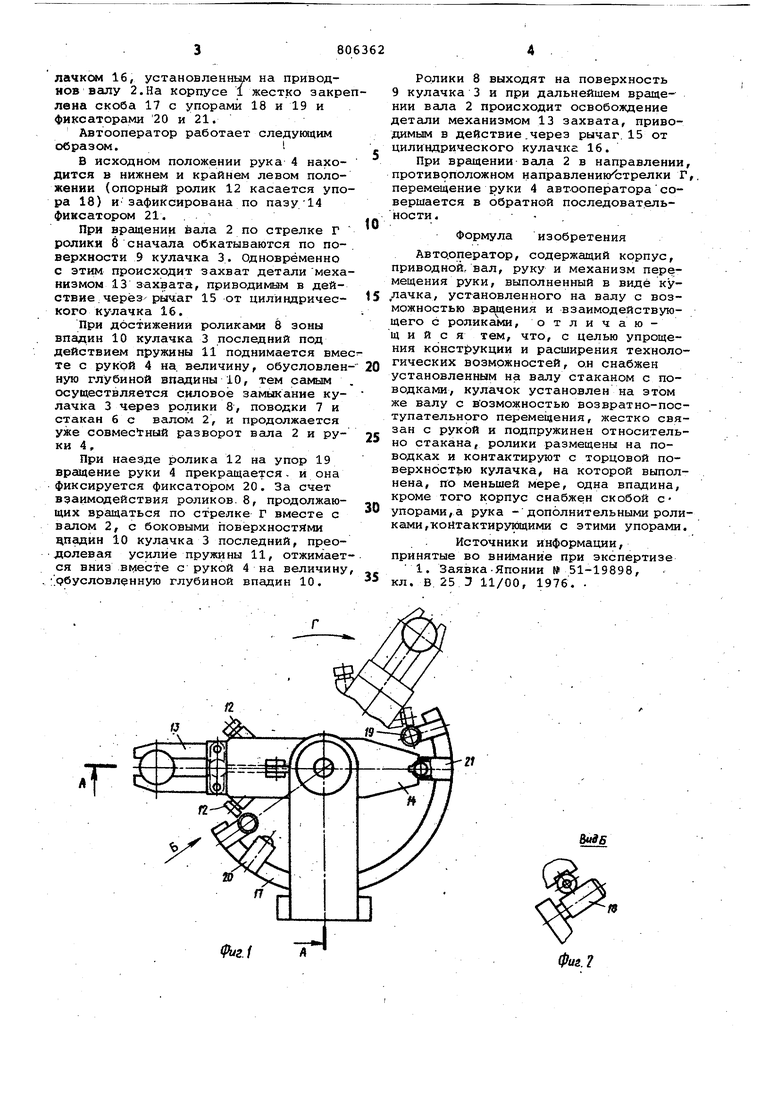
. Изобретение относится к машиностроению и предназначено для работы в автоматическом цикле, в частности в автоматических линиях. Известен автооператор, содержащий корпус, приводной вал, руку и м ханизм перемещения руки, выполненны в виде кулачка, установленного на валу с возможностью вращения и взаимодействующего с роликами ij. Недостатком известного автооператора является сложность его конструк ции, обусловленная наличием бол-ьшого количества кинематически связанных деталей, а также то, что кинематическая схема автооператора исключает возможность регулирования.величины угла разворота ведомого вала вместе с рукой относительно вертикальной ос Цель изобретения - упрсяцение конс рукции и расширение технологических возможностей автооператора. Указанная цель достигается тем, что автооператор снабжен установленным на валу стаканом с поводками, кулачок установлен на этом же валу с возможностью возвратно-поступатель ного перемещения, жестко связан с ру кой и подпружинен относительно стакана, ролики размещены на поводках и контактируют с торцовой поверхностью кулачка, на которой выполнена, по меньшей мере, одна впадина, кроме того корпус снабжен скобой с упорами, а рука - дополнительными роликами, контактирующими с этими упорами. На фиг. 1 изображен автооператор в плане, общий вид на фиг. 2 - вид Б на фиг. 1; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - разрез В-В на фиг. 3. Автооператор содержит корпус 1, в подшипниках которого установлен приводной вал 2. Торцовый кулачок 3, жестко связанный с рукой 4, установлен на валу 2 с возможностью возвратно-поступательного перемещения вдоль вала в шариковых направляющих 5. На валу 2 жестко установлен стакан 6, снабженный поводками 7 с роликами 8. Ролики 8 контактируют с поверхностью 9 кулачка 3, на которой выполнены две симметричные впадинц 10. Кулачок 3 поджимается к роликам8 пружиной 11. На руке 4 расположены опорные ролики 12, механизм 13 захвата, а на пе-, риферийной части руки выполнен паз 14 для фикcaци. Механизм 13 захвата связан рычагсм 15 с цилиндрическим к,улачком 16, установленным на приводнов валу 2.На корпусе 1 жестко закре лена скоба 17 с упорами 18 и 19 и фнксаторами 20 и 21. Автооператор работает следующим образом. В исходном положении рука 4 находится в нижнем и крайнем левом положении (опорный ролик 12 касается упо ра 18) и зафиксирована по пазу 14 фиксатором 21. . При вращении вала 2 по стрелке Г ролики 8 сначала обкатываются по поверхности 9 кулачка 3. Одновременно с этим происходит захват детали меха низмом 13 захвата, приводимым в действие . через- рычаг 15 от цилиндрического кулачка 16. При достижении роликами 8 зоны впадин 10 кулачка 3 последний под действием пружины 11 поднимается вме те с рукой 4 на. величину, обусловлен ную глубиной впадины 10, тем самым осуществляется силовое замыкание кулачка 3 через ролики 8, поводки 7 и стакан 6 с валом 2, и продолжается уже совмес гный разворот вала 2 и руки 4, При наезде ролика 12 на упор 19 вреоцение руки 4 прекращается- и она фиксируется фиксатором 20. За счет взаимодействия роликов. 8, продолжающих вращаться по стрелке Г вместе с валом 2f с боковыми поверхностями дпадин 10 кулачка 3 последний, преодолевая усилие пружины 11, отжимает ся вниз вместе с рукой 4 на величину :рбусловленную глубиной впадин 10. Ролики 8 выходят на поверхность 9 кулачка 3 и при дальнейшем вращении вала 2 происходит освобождение детали механизмом 13 захвата, приводимым в действие.через рычаг. 15 от цилиндрического кулачке 16. При вращении вала 2 в направлении, противоположном направлению трелки Г,, перемещение руки 4 автооператорасовершается в обратной последовательности. , Формула изобретения Автооператор, содержащий корпус, приводной/вал, руку и механизм перемещения руки, выполненный в виде кулачка, установленного на валу с возможностью вращения и взаимодействующего с роликами, отличающ и и с я тем, что, с целью упрощения к6нст укции и расширения технологических возможностей, о.н снабжен установленным на валу стаканом с поводками/ кулачок установлен на этом же валу с возможностью возвратно-поступательного перемещения, жестко связан с рукой и подпружинен относительно стакана, ролики размещены на поводках и контактируют с торцовой поверхностью кулачка, на которой выполнена, по меньшей мере, одна впадина, кроме того корпус снабжен скобой супорами,а рука -дополнительными роликами,контактирующими с этими упорами. Источники информации, принятые во внимание при экспертизе 1. Заявка-Японии 51-19898, кл. В 25 :7 11/00, 1976. .
Г
Фиг.1
ЪидБ
Фи&.
