1C
сл
а
него кривошипа 17 наезжает на ролик 29 рычага 18, освобождая верхний кривошип 16 от зацепления его с рычагом 18. Фрикционная муфта 32 начинает вести верхний кривошип 16. За один оборот верхнего кривошипа 16 зубчатая рейка реечной передачи 20 через шатун 19 совершает возвратно-поступательное движение. При этом зубчатое колесо, находящееся в зацеплении с рейкой, передает крутящий
Изобретение относится к транспортно- загрузЬчным устройствам, может быть использовано для автоматизации укладки изделий в тару.
Цель изобретения - расширение тех- j- нологических возможностей.
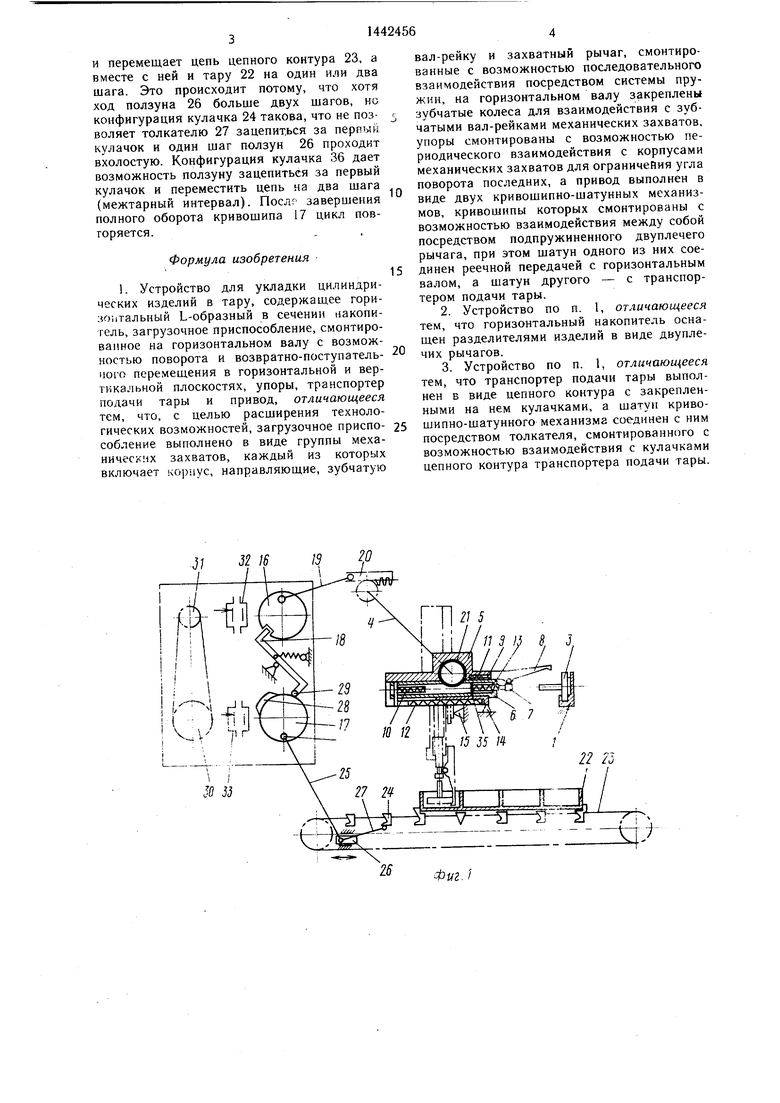
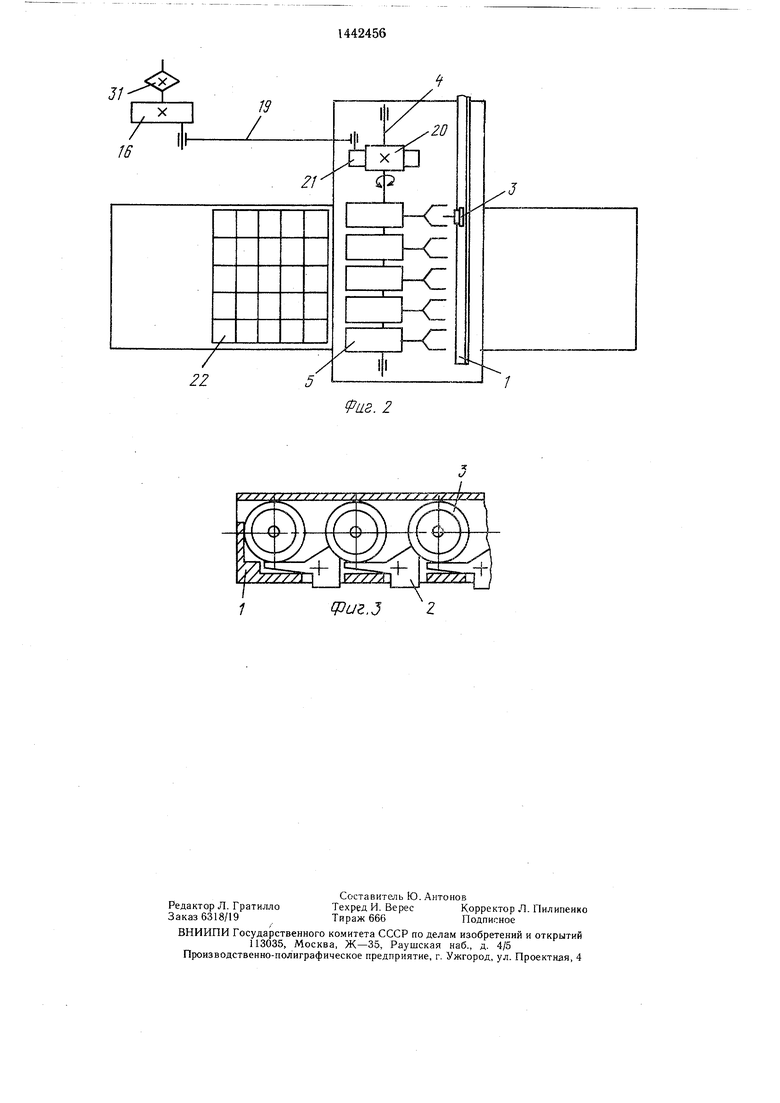
На фиг. 1 изображены кинематическая схема привода и механический захват, разрез; на фиг. 2 - устройство, вид сверху; на фиг. 3 - лоток.
Устройство для укладки цилиндрических 10 момент горизонтальному валу 4 с закреп- изделий в тару содержит горизонтальный,ленными на нем механическими захватами, L-образный в сечении накопитель 1, осна-набранными на валу 4 по количеству ячеек щенный разделителями 2 изделий 3, выпол-в ряду тары 22.
ненными в виде двуплечих рычагов, загру-При вращении зубчатого колеса 21 захзочное приспособление, смонтированное на вата пружины 11, имеющие наибольшее горизонтальном валу 4 с возможностью по-рабочее усилие, разжимаются и через толворота на 270° и возвратно-поступательно-катели 9 перемещают в направлении к наго перемещения в горизонтальной и верти-копителю 1 направляющую 6 вместе с валкальной плоскостях и выполненное в видерейкой 7. Происходит подвод saxBaVa к
группы механических захватов, каждый изизделиям 3 до упора направляющей 6 щтифкоторых включает ко рпус 5, направляющие 6, 20 том в пружину 12. Усилие пружин 11 за- зубчатую вал-рейку 7, захватный рычаг 8,мыкается на корпус 5. Направляющая 6 останавливается.
Дальнейшее вращение зубчатого колеса 21 освобождает пружину 10, которая пересмонтированные с возможностью периоди-мещает вал-рейку 7 до упора торцом ее в ческого взаимодействия с корпусами 5 ме-шайбу 35, поддерживаемую более сильчой
толкатели 9, смонтированные с возможностью последовательного взаимодействия посредством пружин 10-13, упоры 14 и 15,
пружиной 13. При этом захватные рычаги 8 захвата освобождаются и, оттягиваемые пружинами II, охватывают изделия 3, Усилия всех пружин замыкаются на корпус 5,
ханических захватов для ограничения угла поворота последних, привод, выполненный в виде двух кривошипно-шатунных механизмов, кривошипы 16 и 17 которых смоннего кривошипа 17 наезжает на ролик 29 рычага 18, освобождая верхний кривошип 16 от зацепления его с рычагом 18. Фрикционная муфта 32 начинает вести верхний кривошип 16. За один оборот верхнего кривошипа 16 зубчатая рейка реечной передачи 20 через шатун 19 совершает возвратно-поступательное движение. При этом зубчатое колесо, находящееся в зацеплении с рейкой, передает крутящий
Дальнейшее вращение зубчатого колеса 21 освобождает пружину 10, которая перемещает вал-рейку 7 до упора торцом ее в шайбу 35, поддерживаемую более сильчой
пружиной 13. При этом захватные рычаги 8 захвата освобождаются и, оттягиваемые пружинами II, охватывают изделия 3, Усилия всех пружин замыкаются на корпус 5,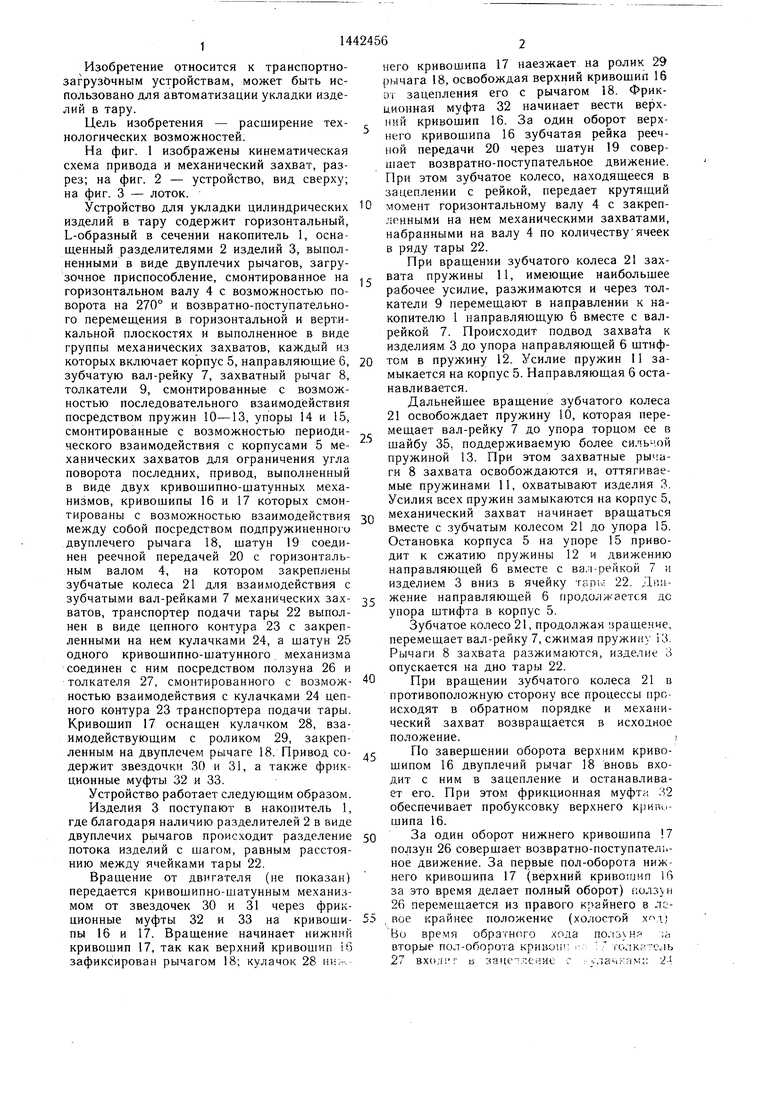
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Транспортно-технологический ротор | 1987 |
|
SU1498565A1 |
| УСТРОЙСТВО ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ПРЕДМЕТОВ В ТАРУ | 1996 |
|
RU2130410C1 |
| Садчик кирпича на печные вагонетки | 1988 |
|
SU1622132A1 |
| Цепевязальный автомат | 1990 |
|
SU1776198A3 |
| Установка для укладки керамических камней на сушильные вагонетки | 1983 |
|
SU1133104A1 |
| Машина для укладки штучных изделий в коробки | 1972 |
|
SU445597A1 |
| Робот к листоштамповочному прессу | 1986 |
|
SU1465158A1 |
| Машина для сборки изоляторов | 1986 |
|
SU1403107A1 |
| УСТРОЙСТВО ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ИЗДЕЛИЙ В ТАРУ | 1996 |
|
RU2146212C1 |
Изобретение относится к транспортно- загрузочным устройствам и может быть использовано для автоматизации укладки изделий в тару. Цель изобретения - расширение технологических возможностей. Устройство для укладки цилиндрических изделий в тару содержит горизонтальный накопитель, оснащенный разделителями изделий, загрузочное приспособление, смонтированное на горизонтальном валу и выполненное в виде группы механических захватов, каждый из которых включает корпус, направляющие зубчатую вал-рейку, захватный рычаг и систему из четырех пружин. Изделия подаются в горизонтальный накопитель. При вращении зубчатых, колес посредством реечной передачи вал-рейка перемещается и изделия захватываются захватными рычагами механических захватов, после чего они начинают вращаться до контакта их корпусов с упорами, затем вал-рейка каждого захвата перемещается и освобождает изделия, которые укладываются в тару, подаваемую транспортером подачи тары. 2 3. п. ф-лы, 3 ил.
тированы с возможностью взаимодействия зо механический захват начинает вращаться между собой посредством подпружиненноговместе с зубчатым колесом 21 до упора 15.
Остановка корпуса 5 на упоре 15 приводит к сжатию пружины 12 и движению направляющей 6 вместе с вал-рейкой 7 и изделием 3 вниз в ячейку тапы 22. Дв:1зубчатыми вал-рейками 7 механических зах- 35 жение направляющей 6 продолжается до ватов, транспортер подачи тары 22 выпол-упора щтифта в корпус 5.
Зубчатое колесо 21, продолжая цращение,
двуплечего рычага 18, щатун 19 соединен реечной передачей 20 с горизонтальным валом 4, на котором закреплены зубчатые колеса 21 для взаимодействия с
нен в виде цепного контура 23 с закрепленными на нем кулачками 24, а шатун 25 одного кривошипно-щатунного механизма соединен с ним посредством ползуна 26 и толкателя 27, смонтированного с возмож- 40 ностью взаимодействия с кулачками 24 цепного контура 23 транспортера подачи тары. Кривошип 17 оснащен кулачком 28, взаимодействующим с роликом 29, закрепленным на двуплечем рычаге 18. Привод со- д держит звездочки 30 и 31, а также фрикционные муфты 32 и 33.
Устройство работает следующим образом.
Изделия 3 поступают в накопитель 1, где благодаря наличию разделителей 2 в виде двуплечих рычагов происходит разделение 50 потока изделий с шагом, равным расстоянию между ячейками тары 22.
Вращение от двигателя (не показан) передается кривошипно-шатунным механизмом от звездочек 30 и 31 через фрикперемещает вал-рейку 7, сжимая пружину 13. Рычаги 8 захвата разжимаются, изделие 3 опускается на дно тары 22.
При вращении зубчатого колеса 21 в противоположную сторону все процессы происходят в обратном порядке и меха}ж- ческий захват возвращается в исходное положение.i
По заверщении оборота верхним кривошипом 16 двуплечий рычаг 18 вновь входит с ним в зацепление и останавливает его. При этом фрикционная муфта 32 обеспечивает пробуксовку верхнего крипи- шипа 16.
За один оборот нижнего кривошипа 7 ползун 26 совершает возвратно-поступательное движение. За первые пол-оборота нижнего кривошипа 17 (верхний криво иип 16 за это время делает полный оборот) Г1олз и 26 перемещается из правого крайнего в леционные муфты 32 и 33 на кривоши-55 , вое крайнее положение (холостой х м;
пы 16 и 17. Вращение начинает нижнийВо время обратного хода по.-1зуня ;а
кривошип 17, так как верхний кривошип i6вторые пол-оборота кривопп - ; голка-ель
зафиксирован рычагом 18; кулачок 28 ни;-..27 вх(. а заце-лечие с ; v., 24
перемещает вал-рейку 7, сжимая пружину 13. Рычаги 8 захвата разжимаются, изделие 3 опускается на дно тары 22.
При вращении зубчатого колеса 21 в противоположную сторону все процессы происходят в обратном порядке и меха}ж- ческий захват возвращается в исходное положение.i
По заверщении оборота верхним кривошипом 16 двуплечий рычаг 18 вновь входит с ним в зацепление и останавливает его. При этом фрикционная муфта 32 обеспечивает пробуксовку верхнего крипи- шипа 16.
За один оборот нижнего кривошипа 7 ползун 26 совершает возвратно-поступательное движение. За первые пол-оборота нижнего кривошипа 17 (верхний криво иип 16 за это время делает полный оборот) Г1олз и 26 перемещается из правого крайнего в ле
и перемещает цепь цепного контура 23, а вместе с ней и тару 22 на один или два шага. Это происходит потому, что хотя ход ползуна 26 больше двух шагов, но конфигурация кулачка 24 такова, что не позволяет толкателю 27 зацепиться за перпый кулачок и один шаг ползун 26 проходит вхолостую. Конфигурация кулачка 36 дает возможность ползуну зацепиться за первый кулачок и переместить цепь на два шага (межтарный интервал). Поел завершения полного оборота кривошипа 17 цикл повторяется.
Формула изобретения
J/ / Щ W
0
5
5
0
вал-рейку и захватный рычаг, смонтированные с возможностью последовательного взаимодействия посредством системы пружин, на горизонтальном валу закреплены зубчатые колеса для взаимодействия с зубчатыми вал-рейками механических захватов, упоры смонтированы с возможностью периодического взаимодействия с корпусами механических захватов для ограничения угла поворота последних, а привод выполнен в виде двух кривошипно-шатунных механизмов, кривошипы которых смонтированы с возможностью взаимодействия между собой посредством подпружиненного двуплечего рычага, при этом шатун одного из них соединен реечной передачей с горизонтальным валом, а шатун другого - с транспортером подачи тары.
Фаг. 1
filB. 2
fpuz.j 2
| УСТРОЙСТВО для УКЛАДКИ ЦИЛИНДРИЧЕСКИХ ПРЕДМЕТОВ В ТАРУ | 0 |
|
SU338451A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
