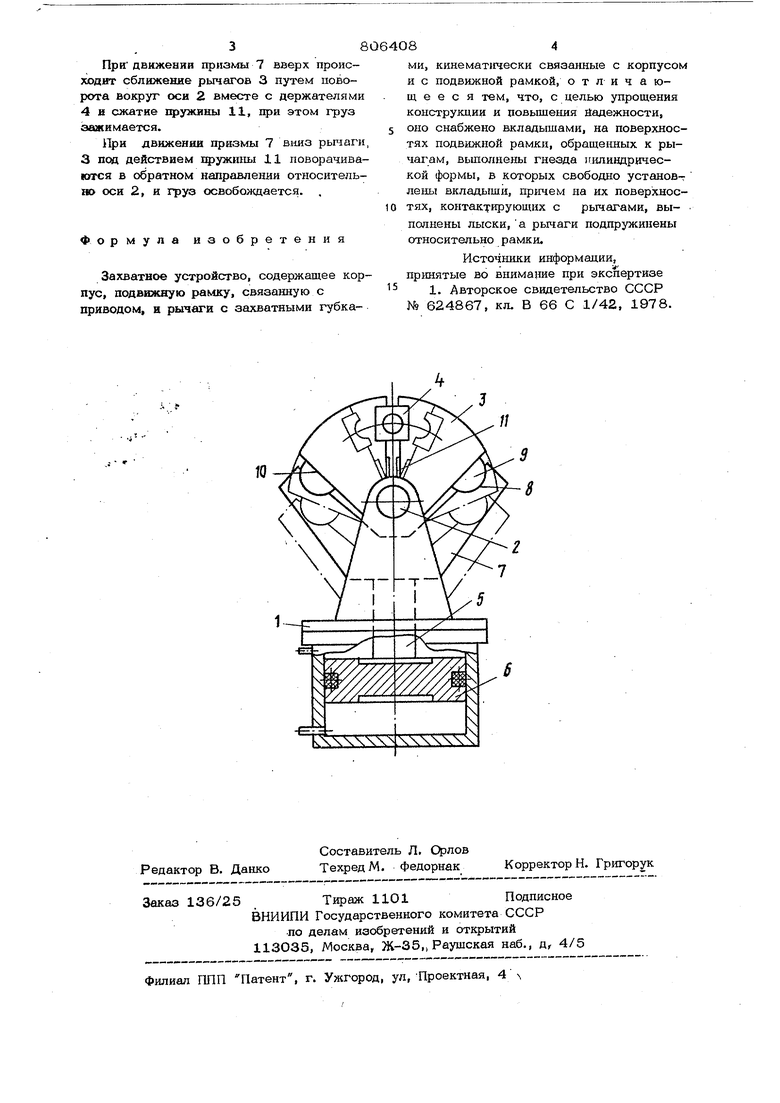
Изобретение относится к машинострое нию, в частности к aaxBaTah манипуляторов, грузоподъемных устройств при сборке или механообработке. Известно захватное устройство, содержащее корпус, подвижную рамку, связш-шую с приводом, и рычаги с захва ными губками, кинематически связанные с корпусом и с подвижной рамкой iT. Такая конструкция сложна, громоздка и не обладает достаточной жесткостью и долговечностью из-за повышенного износа пальцев в криволинейных пазах рычап К Целью изобретения является упрощение конструкции и повышение надежност Для 1 осуществления поставленной цели устройство снабжено вкладышами, на поверхностях подвижной рамки, обращенных к рычагам, выполнены гнезда цилиндрической формы, в которых свободно установлены вкладыши, причем на их поверхностях, контактирующих с рыча гами, выполнены лыски, а рычаги подпружинены относительно рамки. На чертеже изображено захватное устройство в рабочем и исходном положе:- ниях. .Захватное устройство содержит корпус 1, в котором на оси 2 с возможностью поворота закреплены рычаги 3с захватными губками 4. Между губками помещается груз (на черт, не показан). На штоке 5 привода 6 закреплена подвижная рамка 7, выполне1шая в виде призмы, внутренние грани которой снабжены криволинейными, например цилиндри-. ческими, канавками 8. В них свободно установлены вкладыши 9, имеющие лыски 10. Рычаги постоянно контактируют с вкладышами 9 под действием пружины 11, Устройство работает следующим образом. Шток привода б поступательно перемещает призму 7 вместе с вкладышами 9, воздействуя на рьгааги 3.
Продвижении призмы 7 вверх происходит сближение рычагов 3 путем поворота вокруг сх:и 2 вместе с держателями 4 и сжатие хфужвны 11, при этом груз зажимается.
При движения призмы 7 вниз рьпаги, 3 под действием 1фужш1ы 11 поворачиваются в обратном направлении относительно оси 2, и груз освобождается.
Формула изобретения
Захватное устройство, содержащее корпус, подвижную рамку, связанную с приводом, и рычаги с захватными губкаМИ, кинематически связанные с корпусом и с подвижной рамкой, отличающ е е с я тем, что, с целью упрощения конструкции и повышения йадежности, оно снабжено вкладышами, на поверхностях подвижной рамки, обращенных к рычагам, вьшолнены гнезда шшиндрической формы, в которых свободно установлены вкладыши, причем на их поверхностях, контактирующих с рычагами, выполнены лыски,а рычаги подпружинены относительно рамки.
Источники информации, пр1шятые во внимание при экспертизе 1. Авторское свидетельство СССР № 624867, кл. В 66 С 1/42, 1978.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват для испытания на усталостную прочность круглого стержневого образца | 2024 |
|
RU2837991C1 |
| Устройство для перегрузки цилиндрических грузов | 1984 |
|
SU1175821A1 |
| Клещевая подача для универсально-гибочных автоматов с приводом от центральной шестерни | 1987 |
|
SU1547916A1 |
| Захватное устройство | 1985 |
|
SU1255430A1 |
| Устройство для сборки резьбовых соединений | 1985 |
|
SU1328138A1 |
| Устройство для обработки заготовок типа полуцилиндров | 1990 |
|
SU1729731A1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Захватное устройство для деталей типа шатунов | 1983 |
|
SU1159758A1 |
| Схват | 1977 |
|
SU659377A1 |
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |
//
