(54) УСТРОЙСТВО ШАГОВОГО ПЕРЕМЕЩЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство шагового перемещения | 1983 |
|
SU1193340A1 |
| Механизм шаговой подачи | 1979 |
|
SU986687A1 |
| Устройство для ориентированной укладки штучных изделий | 1983 |
|
SU1135691A1 |
| Механизм шаговой подачи | 1978 |
|
SU759181A1 |
| Устройство для шаговой подачи | 1984 |
|
SU1224057A1 |
| Устройство для заточки свеклорежущих ножей | 1976 |
|
SU648386A1 |
| Устройство для поштучной выдачи изделий | 1986 |
|
SU1425042A1 |
| Устройство для подачи полосового материала в рабочую зону пресса | 1986 |
|
SU1371746A1 |
| Автоматическая линия для изготовления тканых коммутационных плат | 1979 |
|
SU912031A1 |
| Станок для гибки змеевиков | 1986 |
|
SU1400714A1 |
1
Изобретение относится к машиностроению и может найти применение в устройствах для работы в автоматическом режиме с прёрывистЕлм движением ведомого звена и регулируемой величиной шага и количества их.
Известно устройство шагового перемещения, содержшчее корпус, смонтированную на направляющих корпуса с возможностью возвратно-поступательного движения рейку и приводной ползун с шарнирно закрепленной на нем толкающей собачкой, взаимодействующей с зубьями рейки. Известное устройство обеспечивает шаговое перемещение рейки с объектом и их фиксацию И
Однако оно не обеспечивает регулирования изменения количества шагов в нем, а также возможности изменения величины шага вследствие конструктивных особенностей.
Цель изобретения - регулирование шага перемещения рейки и количества
шагов.
Поставленная цель достигается тем, что на поверхности рейки, противоположной поверхности с зубьями, .нарезаны дополнительные зубья и
она имеет профилированный упор} устройство снабжено изменяющим шаг рейки элементом, смонтированным на корпусе с возможностью перемещения и фиксации и охватывающим ползун d толкакяцей собачкой, установленной на.рейке пластиной с кулачковым профилем и взаимодействующей с профилирующим упором,
0 шарнирно связанной с корпусом и фиксирующей рейку с собачкой.
Пластина с кулачковым профилем состоит из двух частей, одна из которых жестко связана с рейкой,
5 а другая - с.возможностью перемещения вдоль нее и последующей фиксации, и шарнирно связанной с первой частью заслонки, взаимодействующей с профилирующим упором.
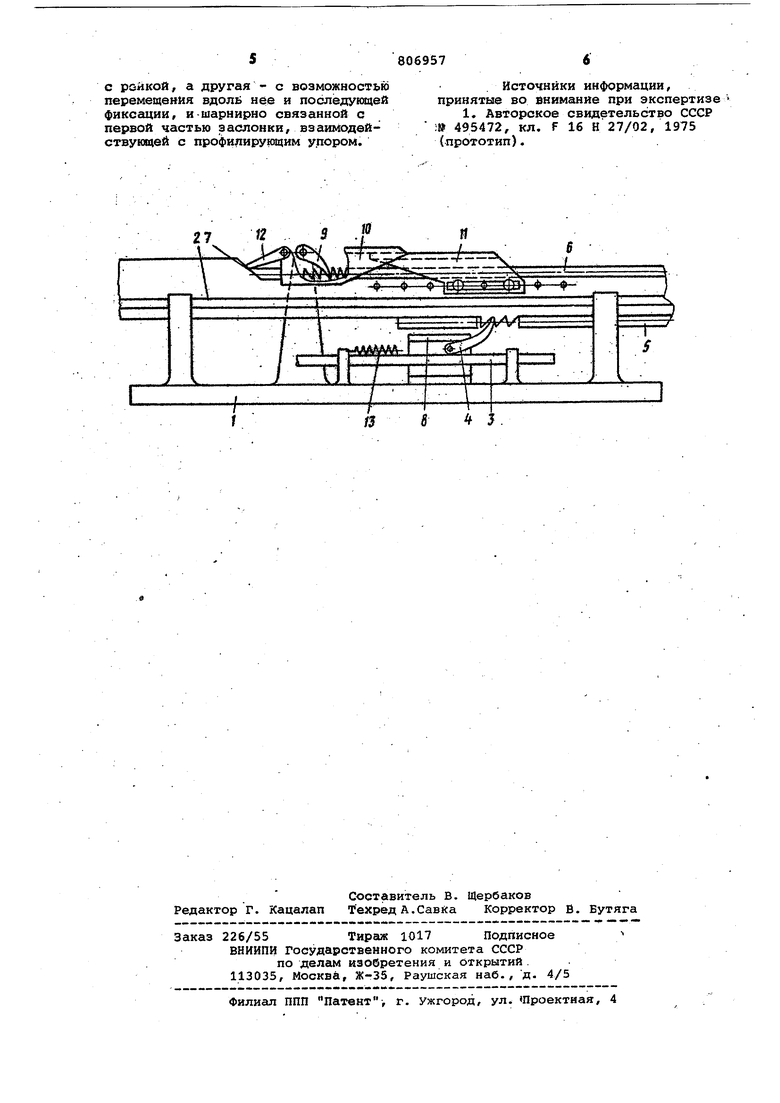
На чертеже изображено предлага0емое устройство шагового перемещения.
Устройство содержит корпус 1, смонтированную на направляющих
5 корпуса с возможностью возвратно- поступательного движения рейку 2 и приводной ползун 3 с шарнирно закрепленной на нем толкающей собачкой 4, взаимодействующей с зубьями 5 рейки 2. На поверхности рейки 2, противоположнрй поверхности с зубьями 5, на реэаныдополнительные зубья 6 и она имеет профилированный упор 7. На: корпусе 1 смонтирован изменяющий шаг рейки элемент 8, установленный с возможностью перемещения и. фкк сации и охватывающий ползун 3 с толкающей собачкой 4... . На рейке установлена пластина с кулачковым профилем, взаимодействующая с профилированным упором 7, а также шарнирно связанная с корпусом и фиксирующая рейку 2 собачка 9. Пластина с кулачковым профилем состоит из двух частей, одна из которых (10) жестко связана с рейкой, а другая (11) - с возможностью пере мещения вдоль нее и последующей фиксации, и шарнирно свяаанной с первой частью 10 заслонки 12, взаимодейству щей с профилирующим упором 7. Корпус 1 связан с ползуном 3 возвратной пружиной 13. Возвратное движенде рейки 2 обеспечивается пружиной .{не показана) , соединяющей рейку 2 и корпус 1. Собачки..4 и 9 снабжены также пружинами { не показаны) для силового замыкания их с зубьями 5 рейки 2. Устройство работает следующим образом. Под действием внешнего привода (электромагнита, пневмопривода., рабочего органа какой-либо установки и т.п.) ползун 3 перемещается вправо в направляющих корпуса 1. При этом шарнирно закрепленная на ползуне 3 толкающая собачка 4 свободным концом сначала скользит по рабочей по верхностй элемента 8/ а затем входит в зацепление с нижним рядом зубьев рейки 2 и смещает ее на определенный шаг вправо. же время шарнирно закрепленная на стойке корпуса 1 стопорная собачка 9 проскальзывает по верхнему ряду зубьев б рейки 2. Ползун 3 после окончания воздействия на него внешнего привода под действием упругой силы возвратной пружины 13 возвращается в исходное положение до упора-ограничителя обратного хода (не показан).Положение рейки 2 фиксируется за счет действия, соединянвдей ее с корпусом 1 воз вратной пружины (не показана) и сто порной собачки 9. При каждом следующем постоянном ходе ползуна 3 рейка 2 перемещается вправо на один шаг,, величина которо го зависит от положения элеметнта 8 Шаговое.перемещение рейки 2 вправо продолжается до момента выхода стоп ной собачки 9 на упор 7 рейки 2. При совершении рейкой 2 последнего niara вправо собачка 9 скользит по рабочей поверхности упора 7 и выходит .из зацепления с верхним рядом зубье 6. При этом.заслонка 12, отклоняясь пропускает собачку 9 на вершину упора 7, а затем, замыкаясь под действием прижимной пружины с рабочей поверхностью .упора7, не допускает собачку 9 обратно под рабочую поверхность пластины с кулачковым профилем, обеспечивая тем самым размыкание стопорной собачки 9 с верхним рядом зубьев 6 рейки 2. Под действием упругой силы пружины (не показана) рейка 2 автоматически движется-влево, а собачка 9 при этом скользит по рабочим поверхностям заслонки 12, части 10 и части 11 пластины с кулач-. ковым профилем. Собачка 9 после схода с рабочей поверхности пластины с кулачковым , профилем под действием прижимной пружины (не показана) замыкается с верхним рядом.зубьев б, фиксируя тем самым рейку 2 в исходном положении. Далее цикл повторяется. Количество шагов в цикле зависит от положения части 11 пластины с кулачковым профилем относительно рейки 2, т.е. от общей длины рабочей поверхности.пластины. Таким образом, обеспечивается автоматический режим работы устройства и возможность регулирования величины шага и количества шагов. Использование устройства позво-, ляет механизировать и автоматизировать процессы сортировкиj пакетирования и др., что повысит культуру производства и производительность труда.. 0 Формула изобретения 1.Устройство шагового перемещения, содержащее корпус, смонтированную на направляющих корпуса с возможностью возвратно-поступательного движения рейку и приводной ползун с шарнирно закрепленной на нем толкающей собачкой , взаимодействующей с зубьями рейки, отличаю щ е е с я тем, что, с целью регулирования шага перемещения рейки и количества шагов,на поверхности рейки, противоположной поверхности с зубьями, нарезаны дополнительные з.убья и она имеет профилированный упор; устройство снабжено изменяющим шаг рейки элементом, смонтированным на корпусе с возможностью перемещения и фиксаций и охватывающим ползун с толкающей собачкой, установленной на рейке пластиной с кулачковым профилем и взаимодействующей с профилирующим упором, шарйирно связ анной с корпусом и фиксирующей рейку собачкой. 2.Устройство ПОП.1, отличающееся тем, что пластина с кулачковым профилем состоит из двух частей, одна из которых жестко связана
с ройкой, а другая - с возможностью перемещения вдол1 нее и последующей фиксации, и-шарнирно связанной с первой частью заслонки, взаимодей ствукхцей с профилирующим упором.
Источники информации, принятые во внимание при экспертизе
1, Авторское свидетельство СССР ; 495472, кл. F 16 Н 27/02, 1975 {прототип)..
