.(54) СЛЕДЯЩИЙ ПРИВОД
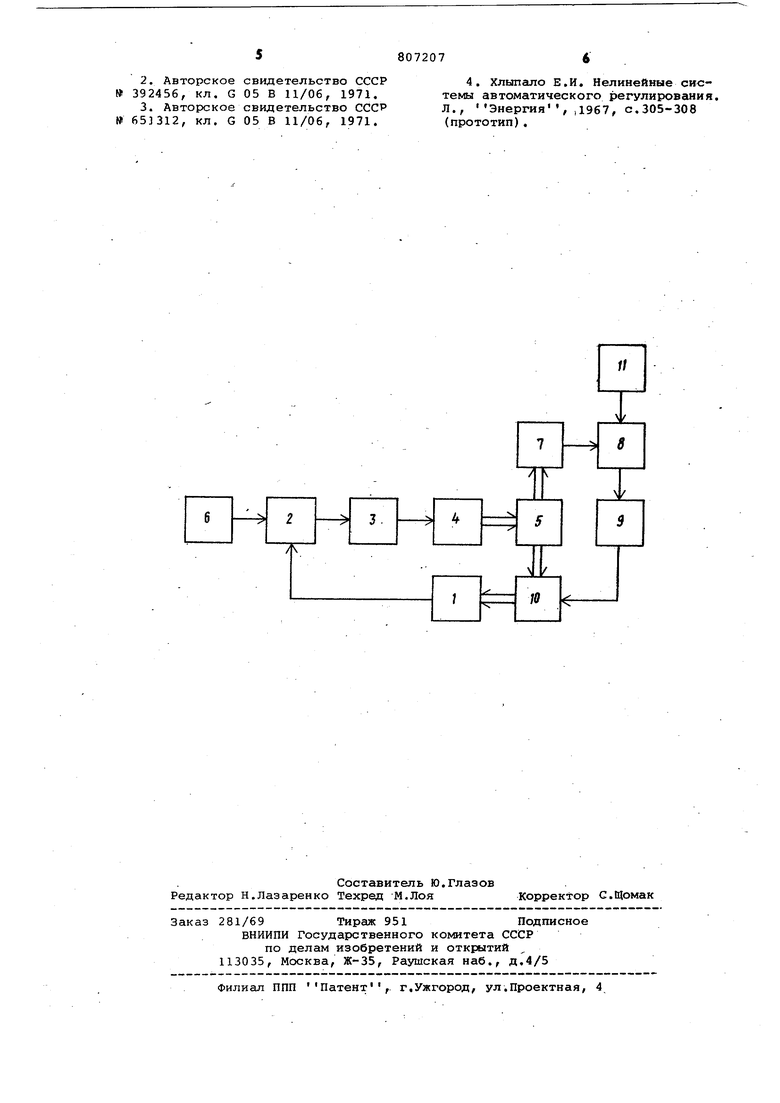
8 сравнения, корректирующее устройство , 9 , функциональный преобразователь 10, источник 11 опорного напряжения.
Следящий привод работает следующим образом.
Сигнал задания с выхода задатчика 6 поступает на один из входов измерителя 2 рассогласования. Вид конкретной технической реализации задатчика 6 и измерителя 2 рассогласования зависит от вида задачи,цля решения, которой предназначен конкретный следящий привод. Так,например, в следящих приводах с частотным или импульсным принципом формирователи сигнала управления в качестве задатчика 6 в частном случае может применяться задающий генератор, а в качесве измерителя 2 рассогласования фазовый дискриминатор. На другой вход измерителя 2 рассогласования поступает сигнал с выхода блока 1 обратной связи. В следящих системах с частотным принципом управления в качестве блоков обратной связи могут применятся, например,, лазерные интерферометры. Сигнал рассогласования по положению поступает на вход регулятора 3 который вырабатывает сигнал управления исполнительным механизмом 4. Последний приводит в движение объект 5 управления вместе с связанными с ним устройствами и механизмами.
Таким образом, замкнутый следящий привод отрабатывает сигнал задания, снимаемый с задатчика 6.
С объектом 5 управления связан датчик 7 положения, сигнал с которого сравнивается по фазе с выходным сигналом источника опорного напряжения 11 в блоке сравнения 8. В качестве источника 11 опорного напряжения и блока 8 сравнения могут быть применены, например, генератор гармонического сигнала и фазовый дискриминатор. Сигнал с выхода блока 8 сравнения поступает на вход корректирующего устройства 9, характеристики которого выбираются в зависимости от требовахий, предъявляемых к характеристикам следящего привода, и могут быть как линейные, так и нелинейные (экстремальные). Сигнал с корректирующего устройства 9 поступает на вход функционального преобразователя 10, коэффициент передачи которого изменяется в зависимости от величины выходного сигнала устройства 9. Изменение коэффициента передачи функционального преобразователя 10 влечет за собой изменение коэффициента передачи всей цепи обратной связи следящего привода.
В качестве функционального преобразователя 10 может быть применен, например, один из видов пьезокера ческих преобразователей, характеристики которых зависят от величины по-
даваемого на них напряжения . Источник 11 опорного напряжения настраивается одновременно с задатчиком .6 таким образом, чтобы в номинальном режиме сигнал на выходе корректирующего устройства 9 отсутствовал. При наличии дрейфа параметров блока 1 обратной связи на выходе блока 8 сравнения появляется сигнал рассогласования, который, в свою очередь, приводит к появлению сигнала на выходе корректирующего устройства 9 и к изменению коэффициента передачи функционального преобразователя 10.
Это изменение коэффициента передачи компенсирует дрейф параметров блока 1 обратной связи, чем достигается повышение точности следящего привода в целом.
В предлагаемом устройстве может быть использован датчик 7 положения любого типа с чувствительностью значительно меньшей чувствительности лазерного интерферометра, но с высокой долговременной стабильностью параметров.
Так, например,в случае применения в качестве блока 1 обратной связи квантового трехзеркального интерферометра, построенного на основе отечественных линейных лазеров типа ЛГ-52-3, ОКГ-13 или ЛГ-56, величина дрейфа может составить 1-5 мкм при темпе дрейфа 0,5-5 мкм/ч. Этот дрейф приводит к соответствующей погрешности следящего привода по положению и по скорости.
Использование предлагаемого изобретения позволяе.т достаточно простыми средствами снизить эту погрешност в 10 раз и довести ее до значений 0,1-0,5 мкм.
формула изобретения Следящий привод, содержащий последовательно соединенные задатчик, измеритель рассогласования, регулятор и исполнительный механизм, выход которого соединен со входом объекта управления, первый выход которого соединен со входом датчика положения а второй выход - с первым входом функционального преобразователя, второй вход которого соединен с выходом корректир1«гацего устройства, а выход через блок обратной связи соединен со вторым входом измерителя рассогласования, отличающийся тем, что, с целью повышения точности привода, в нем установлены последовательно соединенные источник опорного напряжения и блок сравнения, второй вход которого соединен с выходом датчика положения, а выход - со входом корректирующего устройства.
Источники информации, принятые во внимание при экспертизе
Авторское свидетельство СССР 524163, кл. G 05 В 6/02, 1975.
2.Авторское свидетельство СССР № 392456, кл. G 05 В И/Об, 1971.
3.Авторское свидетельство СССР 653312, кл. G 05 В 11/06, 1971.
4. Хлыпало Е.И. Нелинейные системы автоматического регулирования. Л., Энергия, ,1967, с.305-308 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1978 |
|
SU752224A1 |
| Следящая система | 1982 |
|
SU1109711A1 |
| Электрогидравлическая следящая система | 1986 |
|
SU1363133A1 |
| Система управления приводом летучих ножниц | 1977 |
|
SU746418A1 |
| Следящая система | 1989 |
|
SU1732329A1 |
| Следящая система | 1981 |
|
SU962844A1 |
| Система с переменной структурой | 1978 |
|
SU807205A1 |
| Устройство для регулирования скоростидВигАТЕля | 1979 |
|
SU798748A1 |
| Следящая система | 1981 |
|
SU962847A1 |
| Нелинейная следящая система | 1988 |
|
SU1559328A2 |
