(54) СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ
ПРИ ПОДАЧЕ И ТОЧНОМ ОСТАНОВЕ ХЛЫСТОВ НА РАСКРЯЖЕВОЧНЫХ УСТАНОВКАХ С ПРОДОЛЬНОЙ ПОДАЧЕЙл
схема совместного управления приводом механизма подачи и приводом упора, второй вариант; на фиг. 9 - третий вариант привода упора; на фиг.10схема совместного управления приводом механизма подачи и приводом упора, третий вариант.
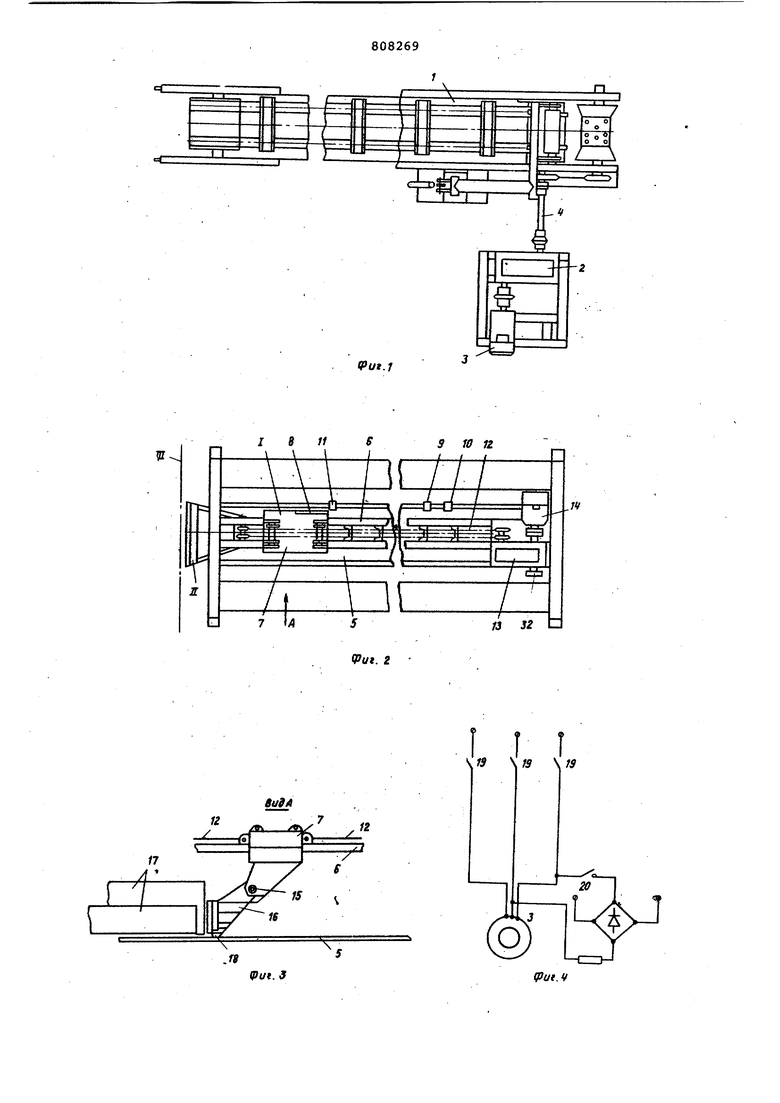
Устройство для реализации способа управления электроприводами при подаче и точном останове: хлыстов (фиг. 1) состоит из механизма 1 подачи с приводом, содержащим редуктор 2, двигатель 3, кинематическую цепь 4, приемный стол 5, над которым в направляющих 6 подвижно закреплена каретка 7 с шунтом 8, взаимодействующим с бесконтактными датчиками, например, предварительным 9, основным 10 и исходного положения 11. Каретка 7 перемещается цепной передачей 12, соединенной с редуктором 13 и двигателем 14. На карет ке 7 при помощи шарнира 15 закреплен упор 16, выставленный навстречу движению хлыстов 17 (показаны два хлыста) и взаимодействующий через роликовые опоры 18 с приемным столом 5. Двигатель 3 привода механизма подачи (фиг. 4) подсоединен к трехфазной сети пускателем 19 и к сети постоянного тока - пускателем 20. Привод упора 16 по первому варианту (фиг. 5) содержит односкоростной асинхронный короткозамкнутый двигатель 14, который подсоединен к трехфазной сети пускателями 21 (вперед) и 22 (назад), а также через сопротивления 23, часть которых шунтируется пускателями 24. К цепи постоянного тока двигатель 14 подсоединен пускателем 25 через ограничительное сопротивление 26, часть которого шунтируется тиристором 27, управляемым блоком 28, который содержит поляризованное реле 29, промежуточные реле 30, 31, тахогенератор 32 и элемент 33схемы коммутации тиристора 27.
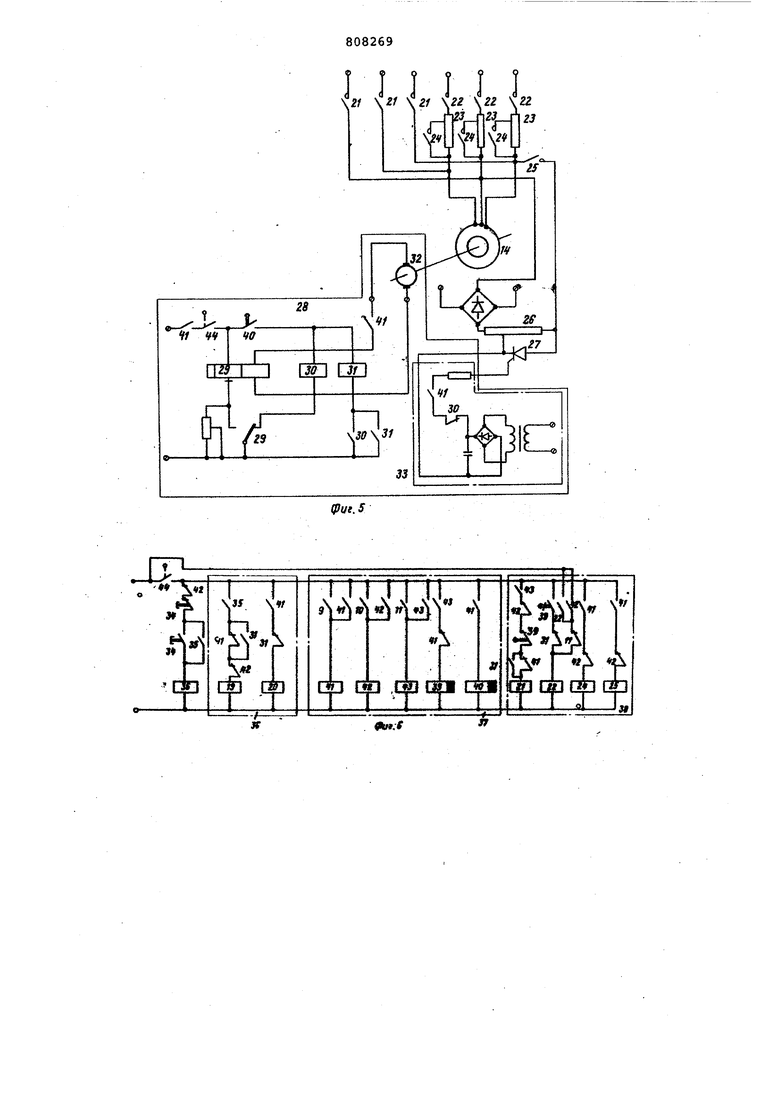
Схема совместного управления приводом механизма подачи и приводом (первый вариант) упора (фиг. б) содержит кнопочную станцию 34 заказа и реле 35 заказа, блок 36 управления приводом механизма подачи, блок 37 контроля перемещения упора, бл(к 38 управления приводом упора.
При этом блок 36 содержит катушк пускателей 19 и 20.
Блок 37 содержит реле времени 39 40 и реле-повторители 41, 42, 43 выходных реле предварительного датчика 9, основного 10 и датчика 11 исходного положения упора 16, а блок 38 - катушки пускателей 21, 22, 24 25.
Кроме того, схема содержит конеч ный выключатель 44 верхнего положения пилы.
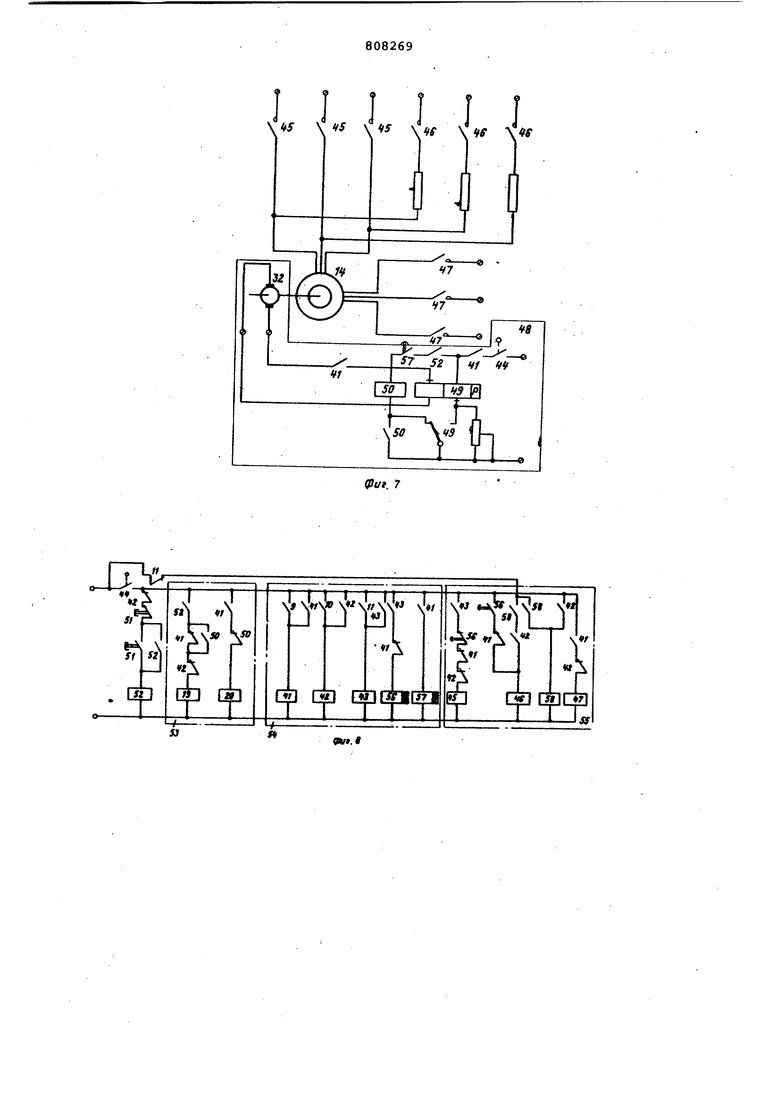
Привод упора по второму вариант (фиг. 7) содержит двухскоростной асинхронный двигатель 14 (наприме Т2-52/16-2 с глубиной регулировани 8:1).,который подключен к сети пускатлями 45(вперед),46(назад)большой скрости и 47 (вперед)малой скорости.Он же содержит блок 48 контроля скорости упора, включающий поляризованное реле 49, промежуточное реле 50 и тахогенератор 32.
Схема одновременного управления приводом механизма подачи приводом (второй вариант) подвижного упора (фиг. 8) содержит кнопочную станцию заказа с кнопками 51, реле 52 заказа, блок 53 управления приводом механизма подачи, блок 54 контроля перемещения упора, блок 55 управления приводом упора.
При этом блок 53 содержит катушки пускателей 19, 20, блок 54 катушки реле времени 56, 57, катушки реле-повторителей 41, 42, 43 выходных реле датчиков 9, 10, 11. Блок 55 содержит промежуточное реле 58, .а также катушки пускателей 45, 46, 47.
Привод упора по третьему вари.анту (фиг. 9) содержит также двухскоростной двигатель 14 (например, Т2-52/16-2), но к сети он подкгаочен пускателями 59 (вперед) и 60 (назад): большой скорости и 61 малой скорости.
Пускатели 62 и 63 соединяют все статорные обмотки большой и малой скоростей параллельно и подсоединяют к одной из фаз сети, а нули звезд этих Обмоток 64, 65 чэрез ограничительные сопротивления 66, 67 подсоединяют к другим фазам. Здесь же блок 68 контроля скорости упора и хлыста содержит тахогенератор 32, поляризованные реле 69, 70 и 71 и их реле-повторители 72, 73, 74.
Схема совместного управления приводом механизма подачи и приводом (третий вариант) подвижного измерительного упора {фиг. 10) содержит кнопочную станцию заказа с кнопками 75, реле 76 заказа, блок 77 управления приводом механизма подачи, блок 78 контроля перемещения упора, блок 79 управления приводом упора. При этом бло 77 содержит катушки пускателей 19, 20, блок 78 - катушки реле времени 80, 81, катушки реле-повторителей 41, 42, 43 выходных реле датчиков 9, 10, 11. Блок 79 содержит катушк пускателей 59, 60, 61, 62, 63 и :промежуточное реле 82.
Способ управления электроприводами при подача и точном останове хлыстов осуществляется следуквдим Образом. Перед началом работы каретка 7 занимает положение 1, а выставленны навстречу движению хлыста упор 16 находится на расстоянии 3-5 см от о пилы в положении 5 , При использовании привода механи ма подачи и первого варианта привод подвижного измерительного упора опе ратор в схеме их совместного управления (фиг. 6) нажимает кнопку стан ции 34 и включает реле 35. Последне в блоке 36 включает- пускатель 19 и механизм 1 подачи начинает перемещать хлысты 17 совместно с упором 1 В кинематической цепи последнего вы бираются все зазоры, а также осуществляется натяжка гибкого тягового органа цепной передачи 12. При этом шунт 8 воздействует на датчик 11 исходного положения упора, выходное реле которого включает реле-повтори тель 43 в блоке 37. Начинается без дарный совместный разгон привода механизма подачи и привода упора. С вьвдержкой времени срабатывает рел 39, которое отключает пускатель 22 (большая скорость, назгщ) через сопротивления 23. На установившейся большой скорости двигатель 14 начинает работать в режиме противовключения с ограниченным моментом и с незначительной силой (30-50 кгс) поджимает упор к торцу одного из нескольких хлыстов, перемещаяЛ вместе с ними. При этом хлысты, поджимаясь к упору, осуществляют через роликовую опору 18 силовое замыкание упора с приемным столом 5, что позволяет разгрузить в дальнейшем каретку 7 и ее направляющие б. Иунт 8 каретки 7 воздействует на большой скорости на предваритель ный датчик 9, выходное реле которого в блоке 37 включает реле-повторитель 41 и реле 40 времени. Релеповторитель 41 подключает в блоке 28 поляризованное реле 29 к тахогенератору 32, и его контакт перебрасывается в крайнее левое положение, разрывая цепь реле 30. Одновременно реле-повторитель 41 включает пускатели 20, 24, 25, времени и отключает пускатель 19, а в элементе 33 соединяет цепь управ ления тиристора 27 с цепью постоянно го тока пониженного напряжения, и о шунти15ует часть сопротивления 26. В двигателе 3 осуществляется режим динамического торможения, а в двигателе 14- двухтокового (динa ичecкого и противовключения). С выдержкой времени включаетёя ре ле 40, но, так как контакт реле 29 находится в крайнем левом положении реле 30 не включается. После снижения скорости упора и хлыста с одновремённым выравниванием их торцов напряжение, вырабатываемое тахогенератором 32, уменьшается и реле 29 отключается. Включаются реле 30 и 31. Реле 31 включает пускатель 19 и отключает пускатель 20. Двигатель 3 включается на разгон. При этом реле 30 в элементе 33 отключает тиристор 27, и ток динамического торможения уменьшается. С другой стороны, разгону двигателя 3 препятствуют хлысты, упирающиеся в упор, который, связан с ротором двигателя 14 через ускоряющую передачу редуктора 13. Поэтому со стороны упора 16 ротор двигателя 14 является для двигателя очень большим маховиком. В результате происходит плавный разгон привода механизма подачи с хлыстами, которые при этом интенсивно выравниваются об упор 16. При незначительном увеличении скорости вновь срабатывает поляризованное реле 29, отключающее реле 30, которое вновь включает тиристор 27. Ток динамического торможения в двигателе 14 увеличивается, а двигатель 3 и хлысты уменьшают свою скорость. При снижении скорости приводов реле 29 отключается и включается реле 30, отключакнцее тиристор 27. Вновь осуществляется кратковременный разгон хлыстов, что приводит к перемещению хлыстов с выравненными торцами на некоторой средней скорости дотягивания. При этом хлысты все время интенсивно поджимаются к упору и наряду с выравниванием торцов осуатествляют выбор люфтов и производят натяжку гибких тяговых органов упора. После дотягивания хлыстов до основного датчика 10, включается реле-повторитель 42. Последнее отключает все пускатели, кроме пускателя 22 (назад). При этом момент двигателя 14 снижается, и он только поджимается (в обратном направлении) к торцу хлыстов, не сдвигая их от заданной позиции. Опускается пила и контакт ее конечного выклю чателя 44 снимает блокировки, а после сброски сортимента с приемного стола упор автоматически возвращается к пиле, где датчик 11 отключает пускатель 22. Цикл заказа может быть повторен. 1Й)И совместном использовании привода механизма подачи и второго варианта подвижного измерительного упора оператор в схеме их совместгного управления (фиг. 8) нажимает кнопку 51. Включается реле 52 и пускатель 19, Механизм подачи сдвигает упор, выставленный к пиле, и вначале осуществляется совместный разгон двигателей 3 и 14, а затем последний переходит в режим ограниченного противовключения.
При подходе к предварительному датчику 9 включается реле-повторитель 41. Оно отключает пускатель 46 и включает пускатель 47, а также отключает пускатель 19 и включает пускатель 20, Осуществляется совместное торможение хлыста двигателем 3 механизма подачи и двигателем 14 подвижного упора.
При снижении скорости упора до заданной включается реле 50. Оно отключает пускатель 20 и включает пускатель 19. При этом хлысты упираются в упор, но его двигатель 14 не позволяет разогнаться двигателю 3 сверх малой скорости двигателя 14. После дотягивания хлыстов до основного датчика 10 включается реле-повторитель 42, котоз е отключает все пускатели кроме 46 и после сброски сортимента с приемного стола упор возвращается в исходное положение.
Это сочетание приводов позволяет получить глубину регулирования скорости до 8:1.
При использовании привода механизма подачи и третьего варианта подвижного измерительного упора оператор в схеме их совместного управления (фиг. 10) нажимает кнопку 75 и включает реле 76, которое включает вначале пускатель 19, а затем после включения датчика 11 и релеповторителя 43 - пускатель 5. Осуществляется совместный разгон двигателей 3 и 14 до срабатывания реJie 80, которое включает пускатель 60 и переводит двигатель 14 в режим противовключения с ограниченным момеН.ТОМ. -При подходе упора к предва рительному датчику 9 включается реле-повторитель 41, которое отклю. чает пускатели 19 и 60 и включает пускатель 62. Осуществляется динамическое торможение двигателя 3 и рекуперативное - двигателя 14. Последний снижает свою скорость до 1/3 от рабочей, при этом отключается реле 71 и включается беле-повторитель 74. Оно отйлючает пускатель 62 и включает пускатель 61. Двигатель 14 снижает свою скорость, например до 1/8 от рабочей. При этом отключается реле 70 и включается реле-повторитель.73. Оно отключает пу;скатель 61 и включает пускатель 61. Двигатель 14 вновь снижает свою скЬрость до 1/3 от малой скорости или до 1/24 от рабочей. При этом двигатель 3 не может разогнать хлысты свыше скорости дотягивания, заданной двигателем 14, и вновь интенсивно выравнивает торцы хлыстов как при торможений, так и при дотягивании., При дотягивании хлыстов до датчика 10 включается реле-повторитель 42, осуществляющее останов хлыстов и возврат упора в исходное положение.
Формула изобретения
1.Способ управления электропривдами при подаче и точном останове хлыстов на раскряжевочных у становка с продольной подачей, включакжшй регулирование пониженных скоростей
в электроприводах механизма подачи и подвижного упора, кинематически соединенных через хлыст Леред их отключением, отличающи йс я тем, что, с целью повышения производительности при одновременной подаче нескольких хлыстов, регулирование пониженных скоростей осуществляют путем перевода привода механизма подачи на большую, а привода подвижйого упора - на малую скорость в направлении подачи.
2.Способ по п. 1, отличающийся тем, что перевод привода подвижного упора на малую скорость осуществляют путем дискретного изменения величины тока динамического торможения привода подвиного упора в зависимости от скорости хлыстов.
3.Способ по п. 1, отличающийся тем, что получение малой скорости осуществляется изменением числа пар полюсов в двигателе электропривода перемещения упора.
4.Способ по пп. 1, 3, отличающийся тем, что получение малой скорости электропривода перемещения упора осуществляется изменением числа пар полюсов в двигателе привода перемещейия упора с последующим переключением на питани двигателя однофазным переменным напряжением.
Источники информации, принятые во внимание при экспертизе
1,Авторское свидетельство СССР № 398387, кл. В 27 В 27/10, 1971.
2.Авторское свидетельство СССР
по. заявке № 2602070, кл. В 27 В 27/ 1978 (прототип).
(Риг.1



| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подачи и точного останова хлыстов раскряжовочной установки | 1980 |
|
SU919867A1 |
| Устройство для подачи и точного останова хлыстов раскряжевочной установки | 1980 |
|
SU906690A1 |
| Способ управления электроприводамипРи пОдАчЕ, ТОчНОМ OCTAHOBE ХлыСТОВи иХ РАСКРяжЕВКЕ | 1979 |
|
SU818863A1 |
| Устройство для подачи и точногоОСТАНОВА ХлыСТОВ | 1979 |
|
SU823122A1 |
| Привод механизма подачи и точного остановалЕСОМАТЕРиАлОВ | 1979 |
|
SU850375A2 |
| Устройство для отмера длин сортиментов | 1979 |
|
SU1046088A1 |
| Устройство для отмера длин сортиментов | 1979 |
|
SU893520A1 |
| Устройство для отмера длин сортиментов | 1979 |
|
SU907743A1 |
| Устройство для отмера длин сортиментов | 1979 |
|
SU783004A1 |
| Электропривод механизма управления подачей и точной остановкой лесоматериалов | 1979 |
|
SU863337A1 |

I В 11
9 Ю И
I .1 .1
rVj«
IT
A
Щ
«w;f
J I I 1 I I
«J ff 5 f %f
5э 59 ео fo so
62
JJ -Ts; f3 0
