(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДИСТАНЦИОННЫМ КОПИРУЮЩИМ МАНИПУЛЯТОРОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления дистан-циОННыМ КОпиРующиМ МАНипуляТОРОМ | 1979 |
|
SU809048A1 |
| Устройство для управления копирующим манипулятором | 1981 |
|
SU987573A1 |
| Устройство для управления дистанционным манипулятором | 1981 |
|
SU974332A1 |
| Интерактивная система управленияРОбОТОМ | 1979 |
|
SU798713A1 |
| Устройство для управления манипулятором | 1984 |
|
SU1229728A1 |
| Устройство для управления очувствленным дистанционным копирующим манипулятором | 1978 |
|
SU783750A1 |
| Система управления суставом очувствленного манипулятора | 1978 |
|
SU748341A1 |
| Система управления копирующим манипулятором | 1977 |
|
SU614939A1 |
| Устройство для управления звеном очувствленного манипулятора | 1974 |
|
SU517483A1 |
| Устройство для управления очувствленнымМАНипуляТОРОМ | 1979 |
|
SU824130A1 |
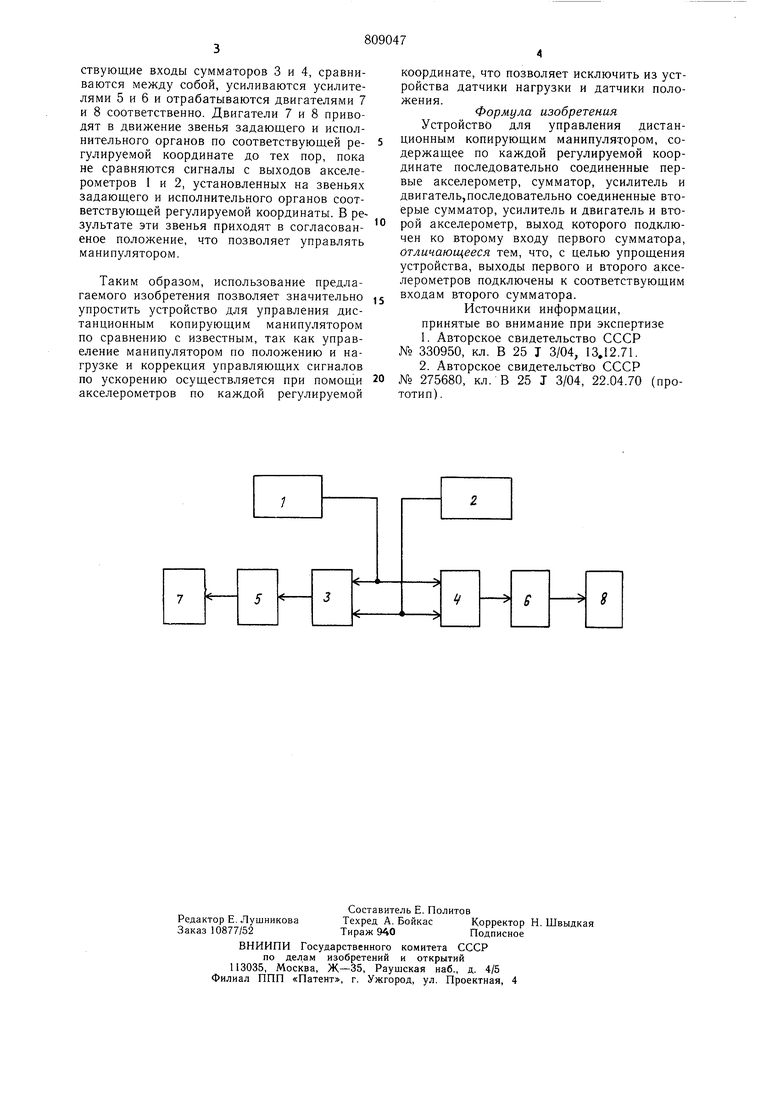
Изобретение относится к автоматике и манипуляторостроению и предназначено для использования в системах управления дистанционными копирующими манипуляторами. Известно устройство для управления дистанционным копирующим манипулятором, содержащее установленные на звене задающего органа акселерометры, выходы которых соединены с соответствующими входами вычислительного блока 1. Недостатком этого устройства является его сложность из-за наличия вычислительного блока с.перемножающей частью. Наиболее близким техническим решением к предлагаемому является устройство для управления дистанционным копирующим манипулятором, содержащее по каждой регулируемой координате последовательно соединенные первые акселерометр, сумматор усилитель и двигатель, последовательно соединенные вторые сумматор, усилитель и двигатель, последовательно соединенные вторые сумматор, усилитель и двигатель и второй акселерометр, выход которого подключен ко второму входу первого сумматора. Кроме того, устройство содержит датчики нагрузки, подключенные к первым сумматорам, и датчики положения, подключенные ко вторым сумматорам 2. Недостатком этого устройства является его сложность, вытекающая из наличия в нем датчиков нагрузки и датчиков положения. Цель изобретения - упрощение устройства. Эта цель достигается тем, что выходы первого и второго акселерометров подключены к соответствующим входам второго сумматора. На чертеже представлена функциональная схема устройства для управления дистанционным копирующим манипулятором. Устройство содержит акселерометры 1 и 2, сумматоры 3 и 4, усилители 5 и 6 и двигатели 7 и 8. Устройство работает следующим образом. При отклонении звеньев задающего или исполнительного органа дистанционного копирующего манипулятора, по любой из его регулируемых координат, сигналы с выходов акселерометров 1 и 2 этой регулируемой координаты поступают на соответствующие входы сумматоров 3 и 4, сравниваются между собой, усиливаются усилителями 5 и 6 и отрабатываются двигателями 7 и 8 соответственно. Двигатели 7 и 8 приводят в движение звенья задающего и исполнительного органов по соответствующей регулируемой координате до тех пор, пока не сравняются сигналы с выходов акселерометров 1 и 2, установленных на звеньях задающего и исполнительного органов соответствующей регулируемой координаты. В результате эти звенья приходят в согласованеное положение, что позволяет управлять манипулятором. Таким образом, использование предлагаемого изобретения позволяет значительно упростить устройство для управления дистанционным копирующим манипулятором по сравнению с известным, так как управеление манипулятором по положению и нагрузке и коррекция управляющих сигналов по ускорению осуществляется при помощи акселерометров по каждой регулируемой координате, что позволяет исключить из устройства датчики нагрузки и датчики положения. Формула изобретения Устройство для управления дистанционным копирующим манипулятором, содержащее по каждой регулируемой координате последовательно соединенные первые акселерометр, сумматор, усилитель и двигатель,последовательно соединенные втоерые сумматор, усилитель и двигатель и второй акселерометр, выход которого подключен ко второму входу первого сумматора, Отличающееся тем, что, с целью упрощения устройства, выходы первого и второго акселерометров подключены к соответствующим входам второго сумматора. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 330950, кл. В 25 J 3/04, 13,12.71. 2.Авторское свидетельство СССР № 275680, кл. В 25 J 3/04, 22.04.70 (прототип) .
