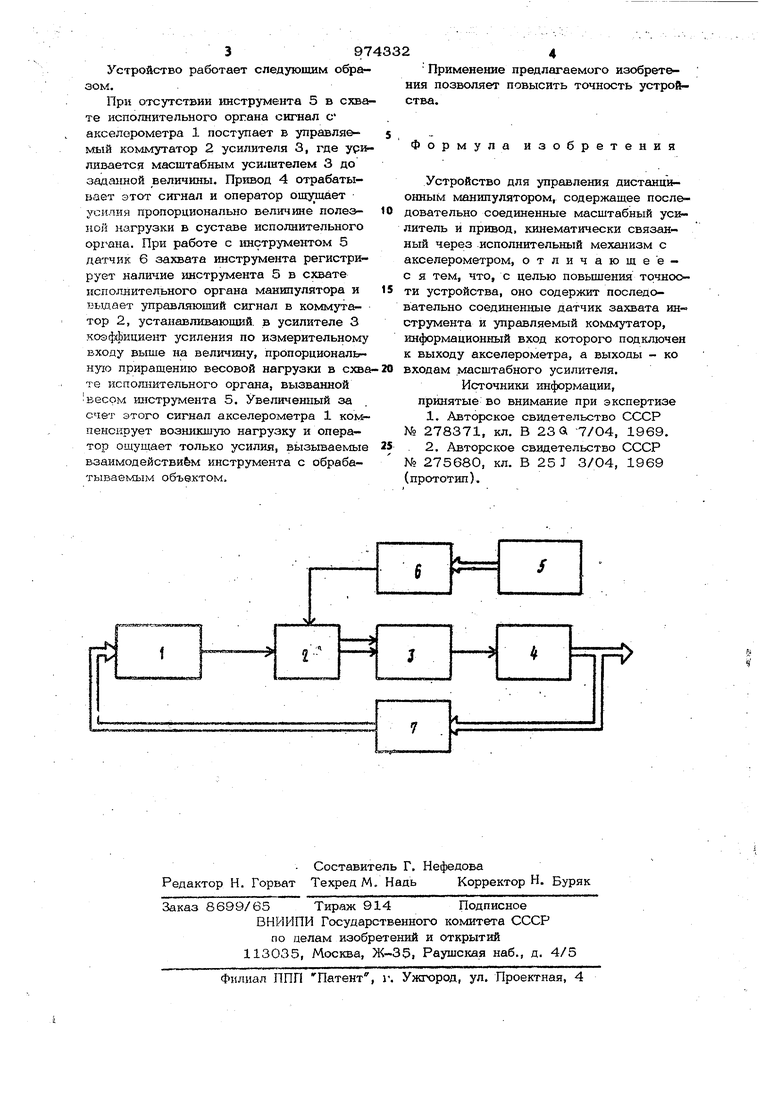
Изобретение относится к радиотехнике и может быть использовано при создании манипуляторов с активным отрая ение нагрузки, предназначенных для работы со сменным инструментом. Известно устройство для управления дистанционным манипулятором, содержащее привод, необратимый редуктор, дат чики момента, датчик нагрузки и сумматор 13 . Однако известное устройство имеет низкую точность при работе с инструмен том. Наиболее близким к предлагаемому является устройство, содержащее последо ва-гвльно соединенные масштабный усилитель и привод, кинематически связанный через исполнительный механизм с акселерометром 2 . Недостатком этого устройства является то, что при работе со сменным и струментом, например дрелью, оператору приходится одолевать сопротивление от- раженного усилия нагрузки, вызываемого действием веса инструмента, который в некоторых случаях может достилать 2/3 от максимальной расчетной величины полезной нагрузки. Цель изобретения - повышение точности устройства. Поставленная цель достигается тем, что устройство дополнительно содержит последовательно соединенные датчик захвата инструмента и управляемый коммутатор, информационный вход которого подключен к выходу акселерометра, а выходы - ко входам масштабного усилителя. На чертеже представлена функциональная схема устройства. Устройство содержит акселерометр 1, управляемый коммутатор 2, масштабный усилитель 3, привод 4, инструмент 5, датчик 6 захвата инструмента, исполнительный механизм 7.
зом.
При отсутствии инструмеита 5 в с хвате исполнительного органа сигнал с alicenepoMeTpa 1 поступает в управляемый коммутатор 2 усилителя 3, где уриливается масштабным уси.штелем 3 до заданной величины. Привод 4 отрабатывает этот сигнал и оператор ощутцает усилия пропорционально величине полезной нагрузки в суставе исполнительного орлеана. При работе с инструментом 5 датчик 6 захвата инструмента регистрирует наличие инструмента 5 в схвате исполнительного органа манипулятора и кьщает управляющий сигнал в коммута тор 2, устанавливающий, в усилителе 3 коэффициент усиления по измерительному входу выше на величину, пропорциональную приращению весовой нагрузки в схва-20
те исполнительного органа, вызванной весом инструмента 5. Увеличенный за счет этого сигнал акселерометра 1 компенсирует возникшую нагрузку и оператор ощущает только усилия, вызываемые взаимодействием инструмента с обрабатываемым объектом.
ния позволяет повысить точность устройства.
Формула изобретения
Устройство для управления дистанционным манипулятором, содержащее последовательно соединенные масштабный усилитель и привод, кинематически связанный через исполнительный механизм с акселерометром, отличающеес я тем, что, с целью повышения точности устройства, оно содержит последовательно соединенные датчик захвата инструмента и управляемый коммутатор, информационный вход которого подключен к выходу акселерометра, а выходы - ко
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 278371, кл. В 23 а -7/О4, 1969.
2.Авторское свидетельство СССР № 275680, кл. В 25J 3/04, 1969 (прототип). входам масштабного усилителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления дистан-циОННыМ КОпиРующиМ МАНипуляТОРОМ | 1979 |
|
SU809048A1 |
| ДИСТАНЦИОННЫЙ КОПИРУЮЩИЙ МАНИПУЛЯТОР | 1970 |
|
SU275680A1 |
| Устройство для управления дистан-циОННыМ КОпиРующиМ МАНипуляТОРОМ | 1979 |
|
SU809047A1 |
| Устройство для управления дистанционным манипулятором | 1986 |
|
SU1386445A1 |
| Система управления суставом очувствленного манипулятора | 1978 |
|
SU748341A1 |
| Устройство для управления манипулятором | 1973 |
|
SU552184A1 |
| Устройство для управления манипулятором | 1979 |
|
SU930256A1 |
| Устройство для управления манипу-ляТОРОМ | 1979 |
|
SU830292A1 |
| Устройство для управления очувствленным дистанционным копирующим манипулятором | 1978 |
|
SU783750A1 |
| Очувствленный дистанционный копирующий манипулятор | 1973 |
|
SU448950A1 |
