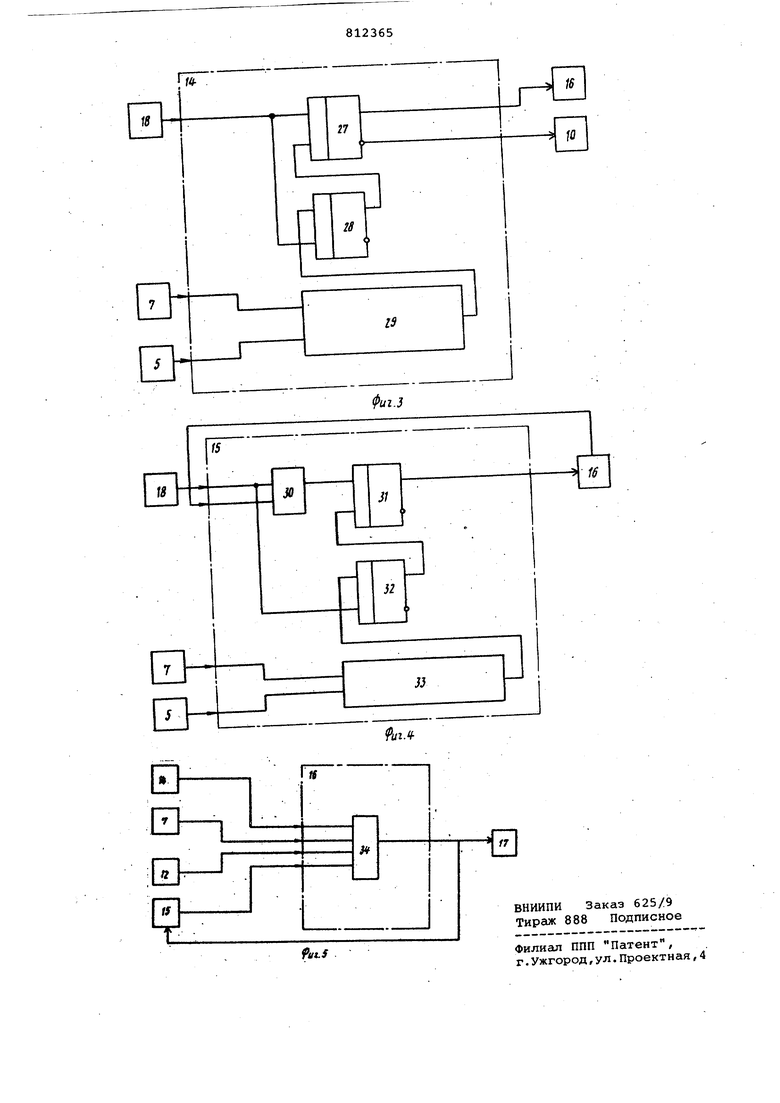
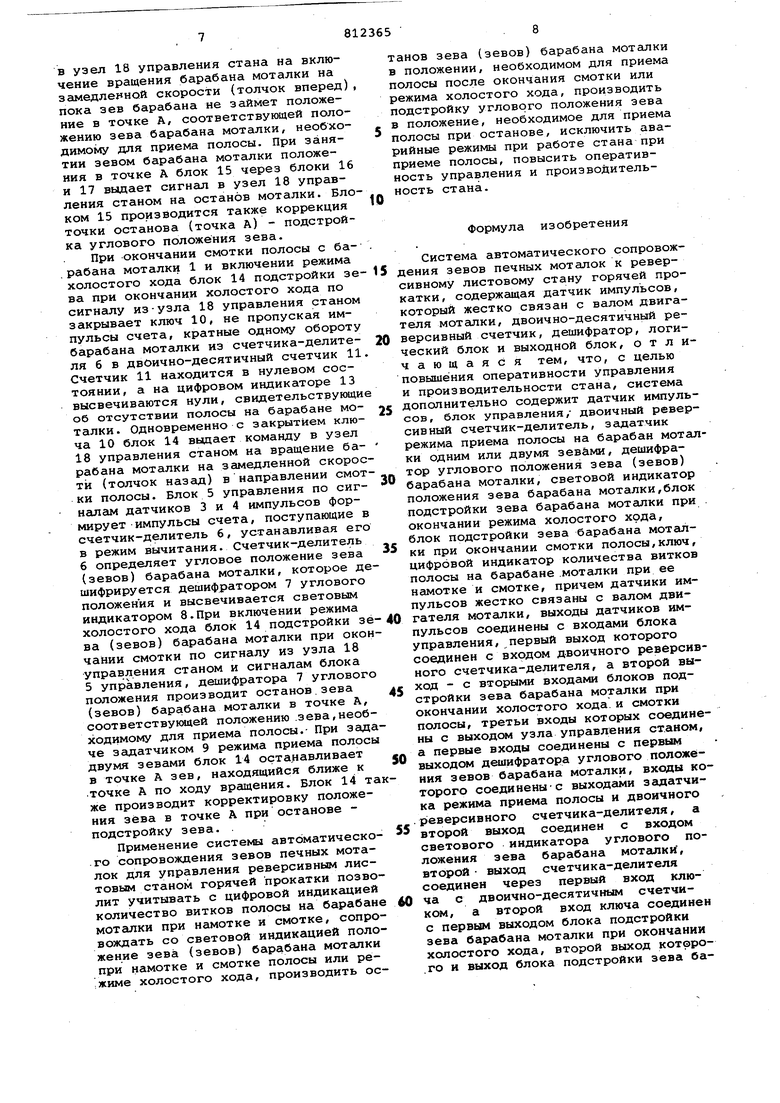
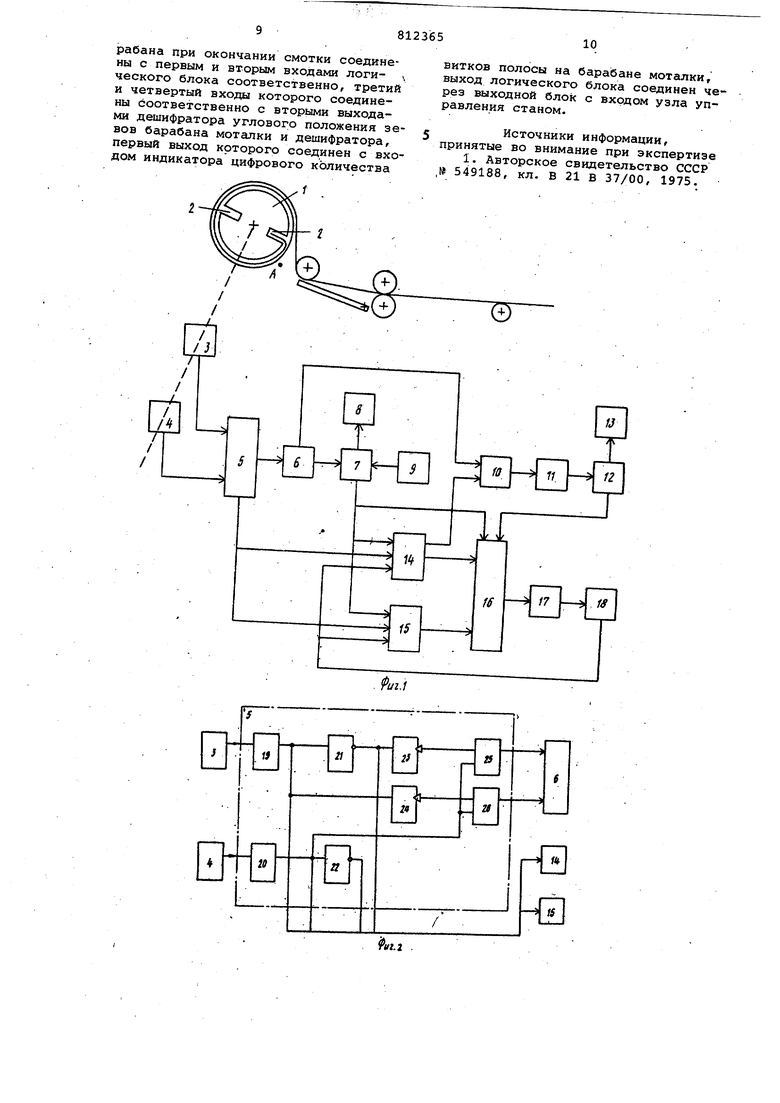
стройки зевов барабана моталки,блок управления, соединенный с выходами датчиков импульсов, узел углового сопровождения зева (зевов) барабана моталки, включающий двоичный реверсивный счетчик-делитель, управляемый блоком управления, задатчик режима приема полосы на барабан моталки одним или двумя зевами, дешифратор углового положения зева (зевов) барабана моталки, соединенный с выходами счетчика-делителя и задатчика режима, световой индикатор углового по ложения зева (зевов) барабана мотсшки, соединенный с выходом дешифрато.ра углового положения, узел останова и подстройки зева (зевов) барабана мотсшки при окончании смотки или режима холостого хода, включающий блок подстройки зева (зевов) барабана мотсшки при окончании режима холостого хода и блок подстройки зева (зевов) барабана моталки при окончании смотки полосы, входы которых соединены с выходами блока управления, дешифрато ра углового положения и узла управления станом, а выходы - с входами логического блока, ключ, управляемый блоком подстройки зева (зевов) барабана моталки при окончании холостого хода и соединяющий выход счетчика-де лителя со входом двоично-десятичного счетчика, цифровой индикатор количества витков полосы на барабане мотал ки при ее намотке и смотке. На фиг. 1 изображена блок-схема системы автоматического сопровождения зевов печных моталок; на фиг.2 блок-схема блока управления; на фиг. 3 - блок-схема блока подстройки зева (зёвов) барабана моталки при окончании холостого хода; на фиг.4 то же, при окончании смотки полосы; на фиг. 5 - блок-схема логического блока. Система автоматгического сопровожденияГ зевов печных моталок содержит соединенные с барабаном моталки 1, на котором расположены зевы 2, датчи ки 3 и 4.импульсов, блок 5 управления, двоичный реверсивный счетчикделитель 6, дешифратор 7 .углового положения зева (зевов) барабана мота ки, световой индикатор 8 углового положения зева (зевов) барабана моталки, задатчик 9 режима приема поло сы на барабан мотгшки одним или двумя зевами, ключ 10, двоично-десятичный реверсивный счетчик 11, дешифратор 12, цифровой индикатор 13 количества витков полосы на барабане моталки, блок 14 подстройки зева (зевон) барабана моталки при окончании холостого хода, блок 15 подстройки зева барабана моталки при окончании смотки полосы, блок 16 логический, блок 17 выходной, узел 18 управления станом. При приеме полосы на барабан моталки импульсы от датчиков 3 и 4 поступают в блок 5 управления. Блок 5 управления формирует импульсы счета, поступающие на счетный вход счетчикаделителя 6 и устанавливает его в режим сложения. С выхода счетчика-делителя 6 импульсы, кратные одному обороту барабана моталки, через откры-. тый ключ 10 поступают на счетный вход счетчика 11, работающего в режиме сложения. Счетчик 11 определяет количество витков полосы на. барабане моталки, которое дешифрируется дешифратором 12 и высвечивается на цифровом индикаторе 13. Счетчик-делитель ,6 определяет угловое положение зева (зевов) барабана моталки, которое дешифрируется дешифратором 7. Блок 5 управления содержит формирователи 19 и 20 сигналов, инвертором 21 и 22 ,динс1мические элементы 23 и 24,логические элементы 25 и 26 И. При вращении барабана моталки ригнал датчика 3 импульсов через формирователь 19 сигнсшов поступает на вход динамического элемента 24, а через инвертор 21 на вход динамического элемента 23. На выходе динамического элемента 23 формируется импульс по переднему фронту, а на выходе динамического элемента 24 формируется импульс по заднему фронту сигнала датчика 3 импульсов. Импульсы с выходов динамических элементов 23 и 24 поступают на первые входы логических эле-. ментов 25 и 26 И соответственно. На вторые входы логических элементов 25 и 26 И поступает сигнал датчика 4 импульсов через формирователь 20 сигналов. Датчики 3 и 4 импульсов расположены таким образом, что сигналы на их выходе перекрывают друг друга на 1/3 своей длительности.При намотке полосы на барабан мотгшки сигнал с датчика 4 импульсов отстает от сигнала датчика 3 импульсов и на счетный вход сложения счетчика-делителя 6 поступаиот импульсы с выхода ло17ического элемента 26 И. При смотке полосы сигнал датчика 4 импульсов опережает сигнал датчика 3 импульсов и на счетный вход вычитания счетчикаделителя 6 поступают импульсы с выхода логического элемента 25 И. Прямое значение сигналов датчиков 3 и 4 импульсов с выхода формирователей 19 и 20 сигналов и их инверсное значение с выходов инверторов 21 и 22 соответственно поступают в блок 14 под-, стройки зева (зевов) барабана моталки при окончании холостого хода и блок 15 подстройки зева барабана моталки при окончании смотки полосы. Блок 14 подстройки зева (зевов) барабана моталки при окончании холостого хода содержит триггер 27 холостого хода, триггер 28 останова барабана моталки и схему 29 логики. При
залании режима холостого хода моталк сигнал из схемы 18 управления стана устанавливает триггер 27 холостого хода в единичное состояние, а тригге
28останова барабана моталки - в нулевое состояние. Единичный сигнал с прямого выхода триггера 27 холостого хода поступает в логический блок 16, где формируется сигнал на включение вращения барабана моталки в режиме холостого,хода. Нулевой сигнал с инверсного выхода триггера 27 холостого хода поступает на вход ключа 10 и закрывает его. При снятии режима холостого хода моталки сигнал из схе№л 18 управления стана не поступает. При подходе зева барабана моталки к исходной точке приема полосы схема
29логики по прямым и инверсным значениям сигналов датчиков 3 и 4 импульсов с блока 5 управления и сигналу дешифратора 7 углового положения зева (зевов) барабана моталки формирует импульс по истечении 3/4, 2/4 или 1/4 длительности сигнала дешифратора 7 углового положения зева (зевов) барабана моталки. Этот импульс поступает на вход триггера 28 останова барабана моталки и устанавливает его в единичное состояние. Единичный сигнал с прямого выхода триггера 28 останова барабана моталки устанавливает триггер 27 холостого хода в нулевое состояние. Нулевой сигнал с прямого выхода триггера 27 холостого хода снимает сигнал на включение вращения барабана моталки в режиме холостого хода в логическом блоке 16,
а единичный сигнал с инверсного выхода триггера. 27 холостого хода открывает ключ 10. Зев барабана моталки - в исходной точке приема полосы. Блок 15 подстройки зева барабана моталки при окончании смотки полосы содержит элемент 30 И, триггер 31 толчка вперед, триггер 32 останова барабана моталки 30 И, схему 33 логики. При смотке полоЬы с барабана моталки из схемы 18 управления стана поступает сигнал н первый вход логического элемента 30 И и на вход триггера останова барабана моталки, устанавливая его в нулевое состояние Триггер 31 толчка вперед находится в нулевом состоянии, сигнал на его прямом выходе отсутствует. При окончании смотки полосы и выходе ее конца из зева барабана моталки барабан продолжает вращаться и зев проходит исходную точку приема полосы. Для возвращения зева барабана моталки в исходную точку для приема полосы логический блок 16 формирует сигнал, который через логический злемент 30 устанавливает триггер 31 толчка вперед в единичное состояние. Единичный сигнал с прямого выхода триггера 31 толчка.вперед поступает в лосгический блок, где формируется сиг-.
нал включения толчка вперед барабана моталки, и барабан моталки начи.нает вращаться в противоположную сторону направления смотки полосы. Зев ба|рабана моталки возвращается в исходную точку приема полосы. При подходе зева барабана моталки к исходной точке приема полосы схема 33 логики по прямым и инверсным значениям сигналов да.тчиков 3 и 4 импульсов с блока 5 управления и сигналу дешиф0ратора 7 углового положения зева (зевов) барабана моталки формирует импульс по истечении 3/4, 2/4 или 1/4 длительности сигнала дешифратора 7 углового положения зева (зевов)
5 барабана моталки. Этот импульс устанавливает триггер 32 останова барабана моталки в единичное состояние. Единичный сигнал с прямого выхода триггера останова барабана моталки
0 переводит триггер 31 толчка вперед в нулевое состояние. Нулевой сигнал с прямого выхода триггера 31 толчка вперед снимает сигнал включения толчка вперед барабана моталки в логическом блоке 16. Зев барабана моталки 5в исходной точке приема полосы.
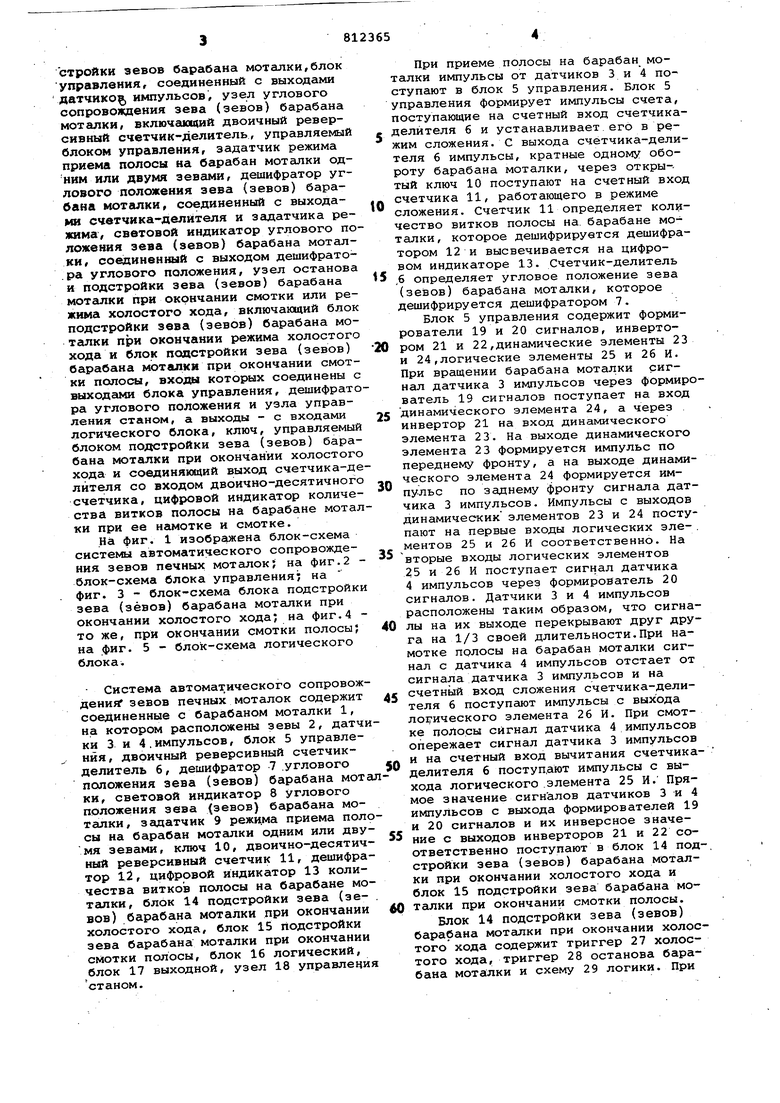
Логический блок 16 содержит набор логических элементов 34 И. В зависи-. мости от значения сигналов на выходе дешифратора 7 углового положения зе0ва (зевов) барабана моталки, дешифратора 12, блока 14 подстройки зева (зевов) барабана моталки при окончании холостого хода, блок 15 подстройки зева барабана моталки при оконча5нии смотки полосы на выходе набора логических элементов 34 И, формируются сигналы управления, определяйщие последовательность смотки полосы с барабана моталки и режим холостого
0 хода и поступающие в выходной блок 17.
Выходной блок 17 состоит из набо ра промежуточных реле, управляемых выходными сигнёшами логического блока 16 И:управляющих контакторами
5 схе1иы 18 управления стана.
Дри смотке полосы счетчики 6 и 11 переводятся блоко 5 управления в режим вычитания. При соответствующем количестве витков полосы на ба0рабане моталки логическим блоком 16 через выходной блок 17 выдаются сигналы в узел 18 управления станом на замедление, обжатие полосы и останов стана. При выходе полосы из зева ба5рабана моталки (точка А) барабан моталки до полного останова повернется на некоторый угол (угол, образованный зевом барабана моталки и прямой, проходящий через центр барабана моoталки и точку А). Блок 15 подстройки зева барабана моталки по сигналам блока 5 управления, дешифратора 7 углового положения и узла 18 управления станем выдает сигнал через ло-. гический блок 16, выходной блок 17
в узел 18 управления стана на включение вращения барабана моталки на замедленной скорости (толчок вперед) пока зев барабана не займет положение в точке А, соответствующей положению зева барабана моталки, необходимому для приема полосы. При занятии зевом барабана моталки положения в точке А блок 15 через блоки 16 и 17 выдает сигнал в узел 18 управления станом на останов моталки. Блоком 15 производится также коррекция точки останова (точка А) - подстройка углового положения зева.
При окончании смотки полосы с барабана моталки 1 и включении режима холостого хода блок 14 подстройки зева при окончании холостого хода по сигналу из-узла 18 управления станом закрывает ключ 10, не пропуская импульсы счета, кратные одному обороту барабана моталки из счетчика-делителя 6 в двоично-десятичный счетчик 11 Счетчик 11 находится в нулевом состоянии, а на цифровом индикаторе 13 высвечиваются нули, свидетельствующи об отсутствии полосы на барабане моталки. Одновременно с закрытием ключа 10 блок 14 вьщает команду в узел 18 управления станом на вращение барабана моталки на замедленной скорости (толчок назад) в направлении смотки полосы. Блок 5 управления по сигналам датчиков 3 и 4 импульсов формирует импульсы счета, поступающие в счетчик-делитель 6, устанавливая его в режим вычитания. Счетчик-делитель 6 определяет угловое положение зева (зевов) барабана моталки, которое дешифрируется дешифратором 7 углового положения и высвечивается световым индикатором 8.При включении режима холостого хода блок 14 подстройки зева (зевов) барабана моталки при окончании смотки по сигналу из узла 18 управления станом и сигналам блока 5 управления, дешифратора 7 углового положения производит останов зева (зевов) барабана моталки в точке А, соответствующей положению .зева,необходимому для приема полосы.- При задаче задатчиком 9 режима приема полосы двумя зевами блок 14 оста11авливает в точке А зев, находящийся ближе к точке А по ходу вращения. Блок 14 та же производит корректировку положения зёва в точке А при останове подстройку зева. .
Применение системы автоматического сопровождения зевов печных моталок для управления реверсивным листовым станом горячей прокатки позволит учитывать с цифровой индикацией количество витков полосы на барабане моталки при намотке и смотке, сопровождать со световой индикацией положение зева (зевов) барабана моталки при намотке и смотке полосы или ре,жиме холостого хода, производить останов зева (зевов) барабана моташки в положении, необходимом для приема полосы после окончания смотки или режима холостого хода, производить подстройку углового положения зева в положение, необходимое для приема полосы при останове, исключить аварийные режимы при работе стана при приеме полосы, повысить оперативность управления и производительность стана.
0
Формула изобретения
Система автоматического сопровож5дения зевов печных моталок к реверсивному листовому стану горячей прокатки, содержащая датчик импульсов, который жестко связан с валом двигателя моталки, двоично-десятичный ре0версивный счетчик, дешифратор, логический блок и выходной блок, отличающаяся тем, что, с целью повышения оперативности управления и производительности стана, система дополнительно содержит датчик импуль5сов, блок управления,- двоичный реверсивный счетчик-делитель, зсщатчик режима приема полосы на барабан моталки одним или двумя зевами, дешифратор углового положения зева (зевов)
0 барабана моталки, световой индикатор положения зева барабана моталки,блок подстройки зева барабана моталки при окончании режима холостого хода, блок подстройки зева барабана мотал5ки при окончании смотки полосы,ключ, цифровой индикатор количества витков полосы на барабане моталки при ее намотке и смотке, причем датчики импульсов жестко связаны с валом дви0гателя моталки, выходы датчиков импульсов соединены с входами блока управления, первый выход которого соединен с входом двоичного реверсивного счетчика-делителя, а второй выход - с вторыми входами блоков под5стройки зева барабана моталки при окончании холостого хода.и смотки полосы, третьи входы которых соединены с выходом узла управления станом, а первые входы соединены с первым
0 выходом дешифратора углового положения зевов барабана моталки, входы которого соединены-с выходами задатчика режима приема полосы и двоичного реверсивного счетчика-делителя, а
5 второй выход соединен с входом светового индикатора углового положения зева барабана моталки , второй выход счетчика-делителя соединен через первый вход клю0ча с двоично-десятичным счетчиком, а второй вход ключа соединен с первым выходом блока подстройки зева барабана моталки при окончании холостого хода, второй выход которо.го и выход блока подстройки зева барабана при окончании смотки соединены с первым и вторым входами логи- у ческого блока соответственно, третий и четвертый входы которого соединены соответственно с вторыми выходами дешифратора углового положения зевов барабана моталки и дешифратора, первый выход которого соединен с входом индикатора цифрового количества 81 5 витков полосы на барабане моталки, выход логического блока соединен через выходной блок с входом узла управления станом, Источники информации, принятые во внимание при экспертизе I. Авторское свидетельство СССР ,№ 549188, кл. В 21 В 37/00, 1975.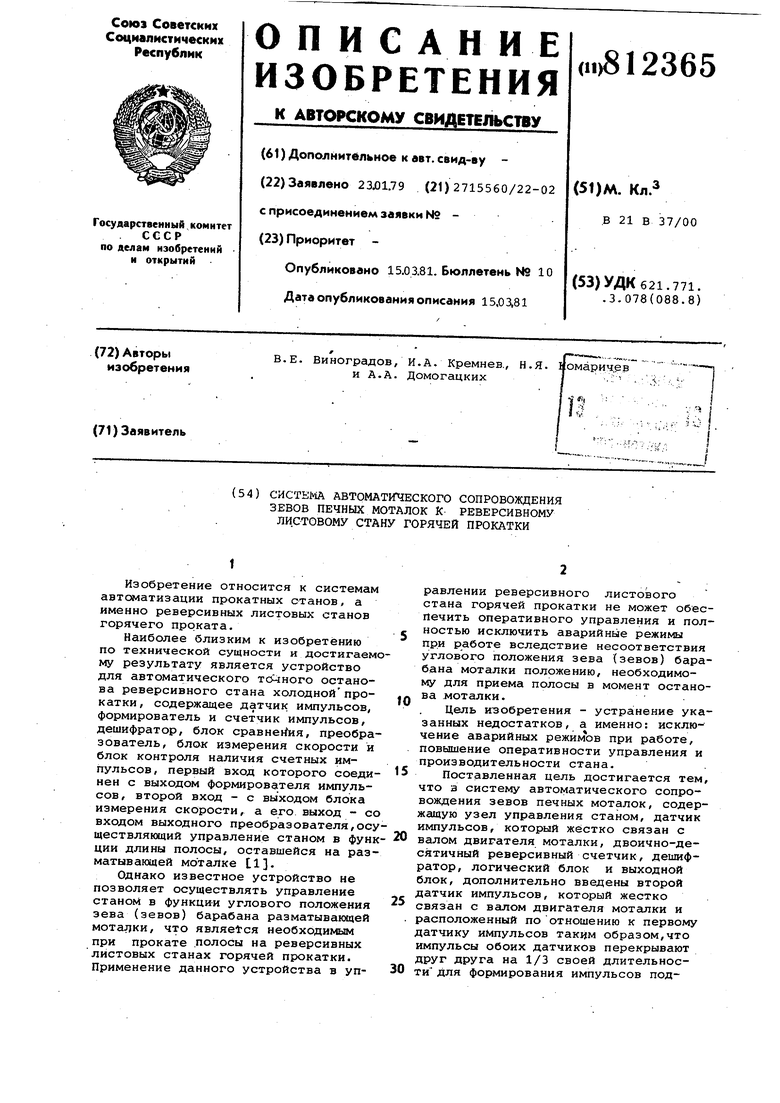
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство измерения средней толщины проката | 1983 |
|
SU1068192A1 |
| Устройство для управления моталкой прокатного стана | 1981 |
|
SU984533A1 |
| Устройство автоматического управленияпРиВОдОМ МОТАлКи | 1977 |
|
SU793675A1 |
| Устройство для автоматического сопровождения сварных швов и останова реверсивного прокатного стана | 1977 |
|
SU743739A1 |
| Устройство для точного останова моталки листового стана | 1985 |
|
SU1299637A1 |
| Устройство автоматического управления приводами агрегата при наборе заданной массы полосы на моталке | 1984 |
|
SU1186304A1 |
| Способ автоматического останова моталки с рулоном в заданном положении на листовом стане | 1982 |
|
SU1052297A2 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ОСТАНОВА МОТАЛКИ | 1966 |
|
SU188455A1 |
| Система управления реверсивным станом холодной прокатки | 1983 |
|
SU1156755A1 |
| Устройство управления охлаждением горячекатанной полосы | 1980 |
|
SU921652A1 |