1
Изобретение относится к машиностроению, в частности к информативным манипуляционным системам.
Известен схват промышленного робота, содержа1дий основание, привод, зажимные губки и датчик усилия И.
Однако данное устройство имеет сложную конструкцию и е обеспечивает надежного захватывания объектов.
Цель изобретения - упрощение конструкции и повышение надежности работы захвата.
Поставленная цель достигается тем что каждая губка снабжена упором, переключателем и шарнирно связанным с основанием посредством механизма пантографа держателем, имеющим полость и крышку с фигурным отверстием, и подпружинена относительно этого держателя, причем упор расположен в указанной полости, а переключатель установлен на крышке с возможностью взаимодействия с упором.
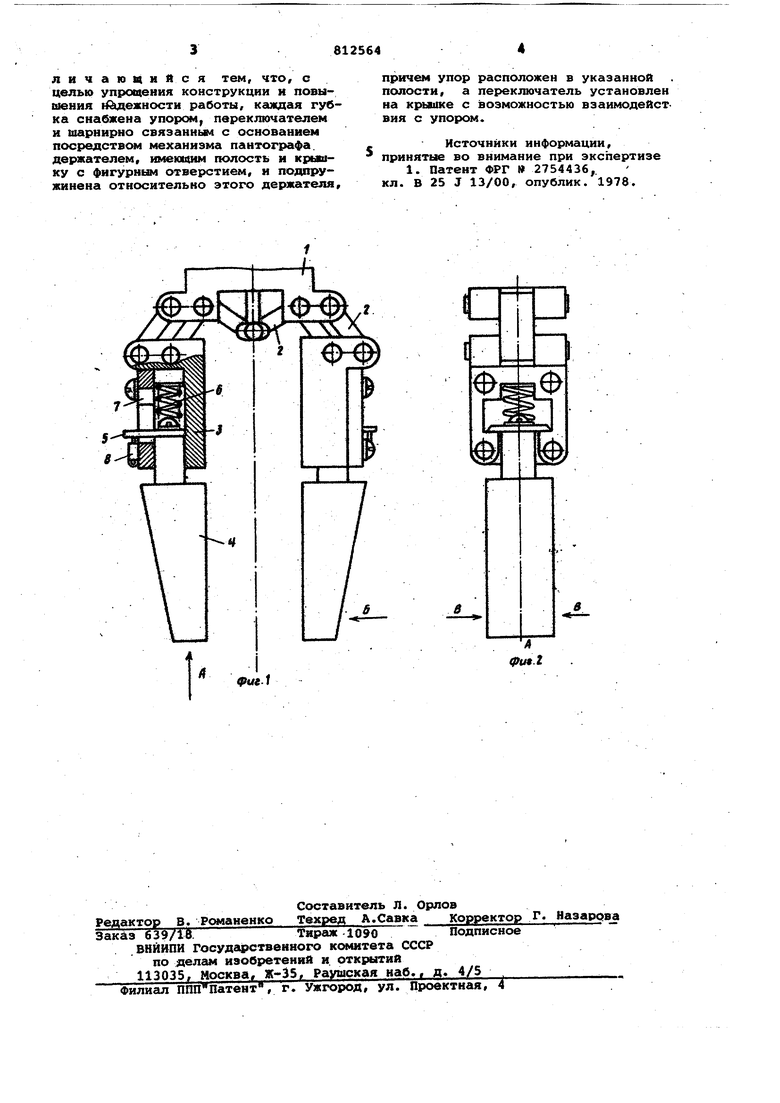
На фиг. 1 изображен охват промышленного робота, вид спереди; на фиг. 2 - то же, вид сбоку.
Схват промышленного робора содержит основание 1, элементы 2 привода держатели 3 губок, зажимные губки
4. Держатели губок с внешней стороны имеют полость, в которую входят основания зажимных губок 4 с закрепленными на них упорами 5. Положение зажимной губки в держателе фиксируется пружиной 6 и фигурной крышкой 7. С внешней стороны на крышке установлен переключатель 8.
Схват промьЕиленного робота рабо0тает следующим образом.
В исходном положении пружина 6 фиксирует с заданной силой зажимную губку 4 и держателе. Переключатель 8 находится во включенном состоянии
5 благодаря воздействию на него упора
5.
В тот момент, когда воздействующее на губки или зажатую ими деталь усилие, направленное в направлении
0 стрелок А и В, превосходит силу прижатий пружины 6, упор 5, закрепленный на губке 4, смещается в держателе губки и размыкает контакты переключателя 8, сигнализирующего
5 о наличии внешнего воздействия определениой величины.
Формула изобретения
Схват промышленного робота, содержащий основание, привод, зажимные губки и датчик усилия, о т 0
личаюцийся тем, что, с целью упрощения конструкции и поаышемия 1Йщежности работы, каждая губка снабжена упором, переключателем и шарнирно свяэанньм с основанием посредством механизма пантографа, держателем, имеюцнм полость и крышку с фигурнЕям отверстием, и подпружинена относительно этого держателя.
причем упор расположен в указанной полости, а переключатель установлен на крышке с аозможностью взаимодействия с упором.
Источники информации, принятые во внимание при экспертизе
1. Патент ФРГ 2754436,. кл. В 25 J 13/00, опублик. 1978.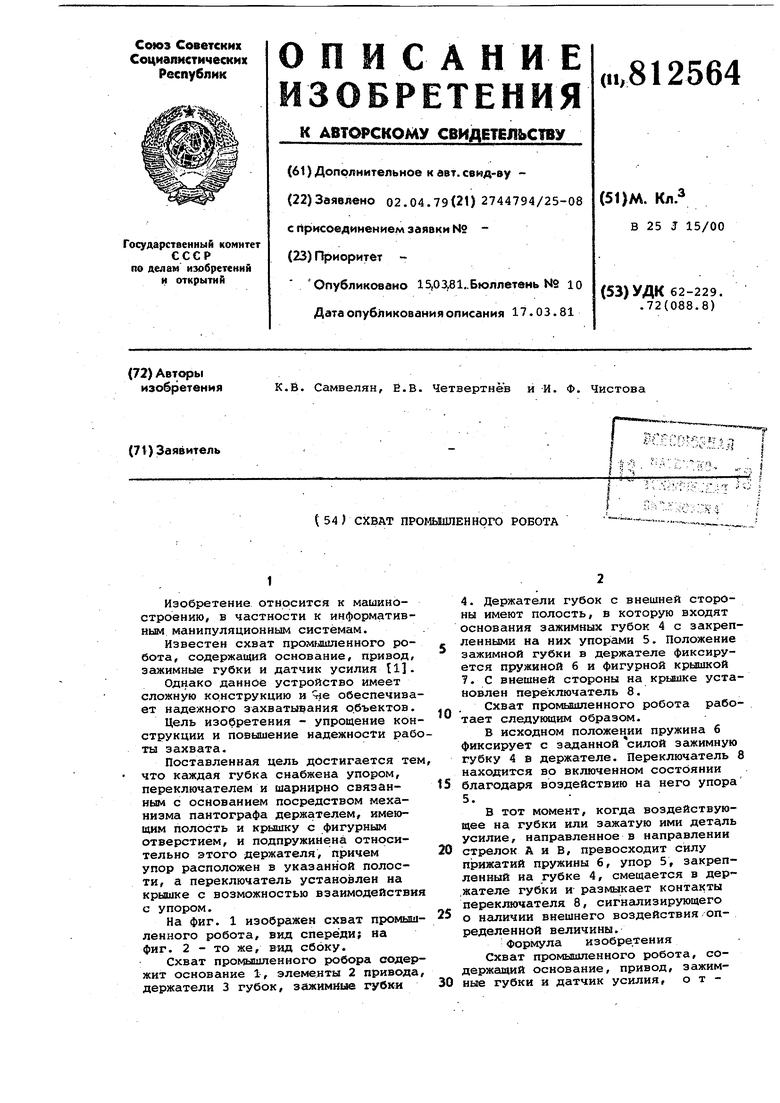
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стыковки сменного инструмента манипулятора | 1984 |
|
SU1288047A1 |
| Захват промышленного робота | 1980 |
|
SU891435A1 |
| Захватное устройство | 1986 |
|
SU1473943A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| ПРИВОД ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2218269C2 |
| Рука промышленного робота | 1983 |
|
SU1177154A1 |
| Робототехнологический комплекс | 1985 |
|
SU1271742A1 |
| Захватное устройство | 1985 |
|
SU1255430A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
.f
