(54) ФАЗОВАЯ СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ
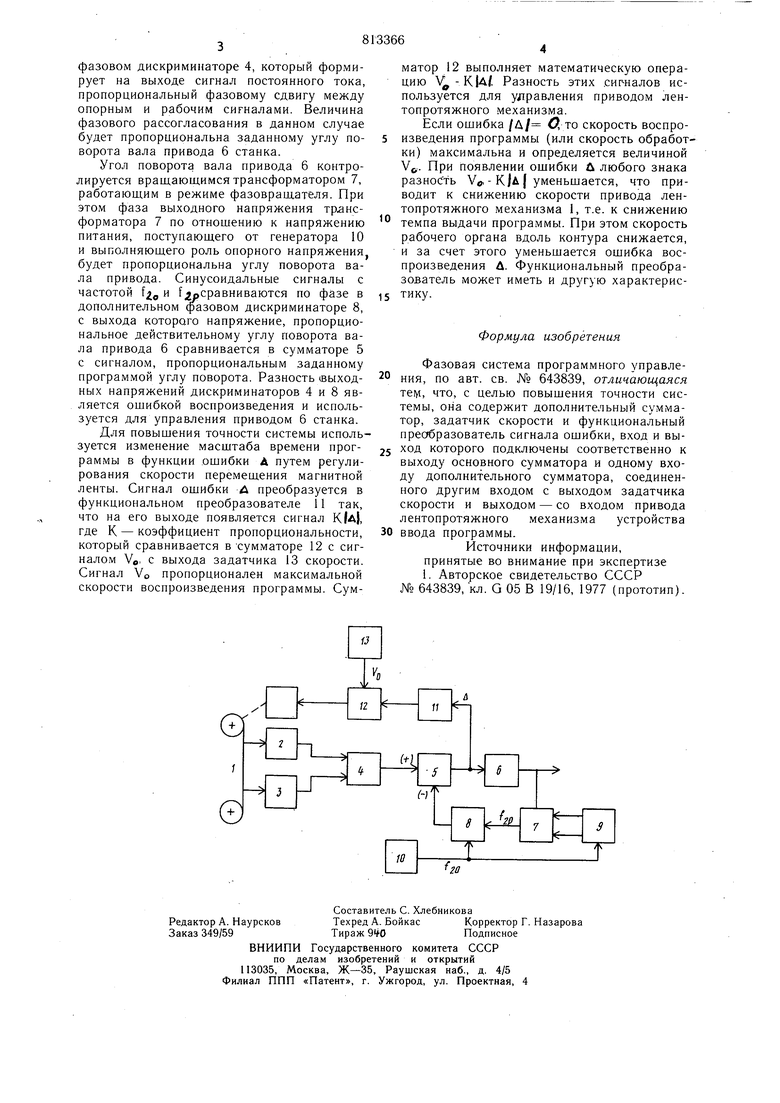
фазовом дискриминаторе 4, который формирует на выходе сигнал постоянного тока, пропорциональный фазовому сдвигу между опорным и рабочим сигналами. Величина фазового рассогласования в данном случае будет пропорциональна заданному углу поворота вала привода 6 станка.
Угол поворота вала привода 6 контролируется вращающимся трансформатором 7, работающим в режиме фазовращателя. При этом фаза выходного напряжения трансформатора 7 по отношению к напряжению питания, поступающего от генератора 10 и выполняющего роль опорного напряжения будет пропорциональна углу поворота вала привода. Синусоидальные сигналы с частотой 2.0 Г рсравниваются по фазе в дополнительном фазовом дискриминаторе 8, с выхода которого напряжение, пропорциональное действительному углу поворота вала привода 6 сравнивается в сумматоре 5 с сигналом, пропорциональным заданному программой углу поворота. Разность выходных напряжений дискриминаторов 4 и 8 является ощибкой воспроизведения и используется для управления приводом 6 станка.
Для повышения точности системы используется изменение масштаба времени программы в функции ошибки Д путем регулирования скорости перемещения магнитной ленты. Сигнал ощибки А преобразуется в функциональном преобразователе 11 так, что на его выходе появляется сигнал К|А), где К - коэффициент пропорциональности, который сравнивается в сумматоре 12 с сигналом Vo, с выхода задатчика 13 скорости. Сигнал Vo пропорционален максимальной скорости воспроизведения программы. Сумматор 12 выполняет математическую операцию -К|А/. Разность этих сигналов используется для улравления приводом лентопротяжного механизма.
Если ощибка /Л/ то скорость воспроизведения программы (или скорость обработки) максимальна и определяется величиной Vff. При появлении ошибки Л любого знака разнобть Ve, - К|А ( уменьшается, что приводит к снижению скорости привода лентопротяжного механизма 1, т.е. к снижению
темпа выдачи программы. При этом скорость рабочего органа вдоль контура снижается, и за счет этого уменьшается ошибка воспроизведения Д. Функциональный преобразователь может иметь и другую характеристику.
Формула изобретения
Фазовая система программного управления, по авт. св. № 643839, отличающаяся Teiyi, что, с целью повышения точности системы, она содержит дополнительный сумматор, задатчик скорости и функциональный преабразователь сигнала ошибки, вход и выход которого подключены соответственно к выходу основного сумматора и одному входу дополнительного сумматора, соединенного другим входом с выходом задатчика скорости и выходом - со входом привода лентопротяжного механизма устройства ввода программы.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 643839, кл. G 05 В 19/16, 1977 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Фазовая система программного управления | 1980 |
|
SU920639A2 |
| Фазовая система программного управления | 1980 |
|
SU930265A2 |
| Фазовая система программного управления | 1981 |
|
SU1117586A2 |
| Самонастраивающаяся система программного управления | 1984 |
|
SU1302240A1 |
| Фазовая система программного управления | 1977 |
|
SU643839A1 |
| Фазовая система программногоупРАВлЕНия | 1979 |
|
SU813363A1 |
| Система автоматического управления | 1973 |
|
SU469951A1 |
| Устройство для управления металлорежущим станком | 1978 |
|
SU746421A1 |
| Фазовая следящая система с комбинированным управлением | 1978 |
|
SU746423A1 |
| Следящий электропривод с компенсацией люфта | 1985 |
|
SU1273875A1 |
