Изобретение относится к электротехнике, в частности к автоматизированному электроприводу с трехфазными индукционным электрическими машинами с разомкнутым магнитопроводом, и может быть использовано в линейном электроприводе специальных транспортных систем на предприятиях химической промышленности, в линейном электроприводе конвейерных поездов, систем высокоскоростного наземного транспорта, а также в магнитогидродинамических машинах для регулирования скорости истечения металла. В электроприводах многих механизмов с трехфазными индукционными электрическими машинами необходимо наряду с основной скоростью движения получать низкую скорость порядка 0,1 от основной.
Известен способ получения низких скоростей, основанный на одновременном питании обмоток индуктора индукционной электрической машины переменным и постоянным током. В машине при этом совмещены два режима работы: двигательный и динамическое торможение. Для получения постоянного тока в фазные обмотки индуктора вк лючают диоды. Широкое применение на практике
получила схема, в которой диод включается в рассечку одной из фаз индуктора 1. Недостатком данного способа получения низких скоростей является то, что в устройстве, реализующем этот способ, произведено S обезличивание фазных обмоток индуктора-, т. е. допускается произвольный выбор фазы, в которую включают диод. Такое обезличивание обмоток трехфазных индукционных электрических мащин с разомкнутым магнир топроводом и произвольный выбор фазы, в которую включают диод, может привести к значительному уменьшению постоянной составляющей тока, уменьшению тормозного усилия, снижению жесткости механической характеристики и производительности рабо5 чих механизмов.
Цель изобретения - получение максимального тормозного усилия и повышения жесткости механических характеристик трехфазных индукционных электрических машин с разомкнутым магнитопроводом при работе их в режиме низких скоростей.
Указанная цель достигается тем, что предварительно измеряют фазные токи, определяют фазу, в которой протекает максимальный ток. после чемо и рс13рыв этой фазы включают диод.
Р;-13омк11утость магнитной цепи трехфаз1;ыл индукцио11иых электрических .iauu-in с ргз()..1м 1агнито11){)1М)дом обус;1авлиi.aer совокупюсть сиеиифичееких явлений, нол чиин1:.1х пазиание ир()Д()льно1о краевого ч(р(|)ек1а. 1 ip()дoлынJlй краевой эффект пригюдит к искажению нс))нальной структуры oeiyinero магнитного 1ихтя и иеодииаковым по вел и ч li не ЭДС в отдельных фазах ийдуктора. Так как осиов1и 1 1 режимом работы трех(}1азных iiitiyiauioHiniix электрических машин с разомкнутым магиитонроводом яв-ляется включение их на сеть е еиммстричиым иаирнжением, то иесимметрия ЭДС ио фаз;;м обусла;5.тивает неснмметрию и (jiasHbix токов. При работе трехфазных электрических ндуки1-1оннь1х ман1ин в режиме еовместиого нитания тормозное уси.тие иро|;орни()на. 1ьио квадрату ностоянной состав. якмнсй иыирямле11Н()го тока, которая, в очередь. ои|1едсляется величиной тока фазы, в которую включен диод. Отсюда след чт, что д.тя нолучення .viaKCHMa.Tbiiofo тормознсмо усилия диод необходимо включать в фазу с максима, током.
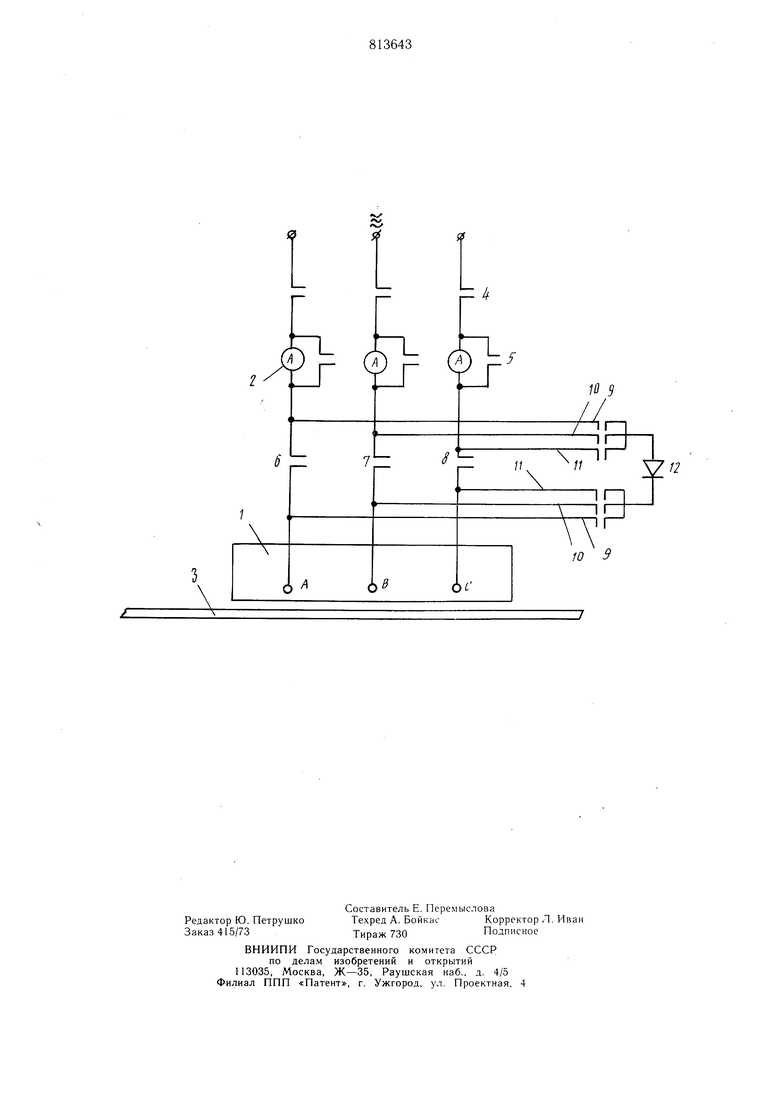
Па чертеже изображена схема ттройства, )Сал11.зуюи1его и)ед,1агасмый снособ.
В каждую {)азу трехфазной обмотки индуктора 1 вк.чючают амиермет|)ы 2. В |) движения рабочего те.та 3 с высокой cKtJpocTLio 1И дуктор 1 и(к|)едство.м линейного к()1Г1акто|)а 4, 1 змерите.тьного контактюра 5 и контакторов В, 7 н 8 высокой скорости подключен к сети трехфазного ие)е.менного тока. Ко1Г|-акторы 9, 10 и 11 низкой скорости при этом ()тк/почсп1. Для перехода в режим работь; с нпзкой скорос1 ыо отключают измерите.ть111лй контактор 5 и амперметрами 2 измеряют (|)a3iibie токи. Па основании соиоставлепия показаний амперметров 2 определяют ()азу, ii которой протекает макеимальиый ток. осле это1о подается ко.маида
на включение в эту фазу диода 12 поередство.м включения контактора низкой скорости и отключения контактора высокой скорости. Жесткость механических характеристик трехфазных индукционных электрических машин е разомкнутым магнитопроводо.м в режиме совместного питания в основно.м определяется жесткостью механической характеристики динамического торможения. Причем повышение постоянпой составляюпдей тока приводит к увеличению жесткости характеристики, так как степень увеличения максимального усилия динамического торможения при этом оказывается выше, че.м степень увеличе1п-1я значения критической скорости. Предла1-аемый еиособ обеспечивает получение не толькомаксимального тормозного усилия, но и наибольшей жесткости механических характеристик .машины в режиме работы с низкой скоростью.
Формула изобретения
(Способ получения низких скоростей трехфазных индукционных электрических .машин с разо.мкнутым магнитопроводом, осуществляe И)iй за счет одиовремеиного питания об.мо1ч;к индуктора пере.менным током от сети и постоянным током, получаемым путе.м включения диода в одну из фаз индуктора, отличающийся тем, что, с целью получения максимального тор.мозного усилия и повы нения жееткости механических характеристик, предварительно измеряют фазные токи, определяют фазу, в которой протекает максимальный ток, после чего в разрыв этой фазы включают диод.
Псточпики информации, принятые во вни.мание при экспертизе 1. МейСте.ть А. М. Дина.мическое торможегше приводов с асинхронпы.ми двигателями. М.-Л.,- «Энергия, 1967, с. 78 -104.
У
/fl 5
Э
/
,P
f
/г
и
I г
V
10 9
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для динамического торможения индукционного электродвигателя с разомкнутым магнитопроводом | 1982 |
|
SU1112517A1 |
| Способ динамического торможенияиНдуКциОННОгО дВигАТЕля C РАзОМКНу-ТыМ МАгНиТОпРОВОдОМ | 1979 |
|
SU797040A1 |
| Устройство для динамическогоТОРМОжЕНия ТРЕХфАзНОгО иНдуКциОННОгОэлЕКТРОдВигАТЕля C РАзОМКНуТыММАгНиТОпРОВОдОМ | 1979 |
|
SU832690A1 |
| Способ динамического торможения индукционного двигателя с разомкнутым магнитопроводом | 1981 |
|
SU993400A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРО-ДИФФЕРЕНЦИАЛАМИ ТРАНСПОРТНОГО СРЕДСТВА | 2022 |
|
RU2794720C1 |
| Устройство для динамического торможения трехфазного индукционного электродвигателя с разомкнутым магнитопроводом | 1981 |
|
SU955406A1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298520C2 |
| КРАНОВЫЙ ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА ГРУЗА | 2007 |
|
RU2345945C1 |
| Устройство для динамического торможения индукционных электрических машин | 1977 |
|
SU632040A1 |
| Устройство для получения ползучейСКОРОСТи | 1979 |
|
SU797049A1 |