1
Изобретение предназначено для механизации и автоматизации технологических процессов.
Известна рука цромышленного робота, содержащая механизм выдвижения схвата, 5 например силовой цилиндр, привод ротации, телескопический вал со схватом, установленным с возможностью вращения вокруг продольной оси руки 1,
Недостатком такой руки робота являет- 10 ся недостаточная точность позиционирования схвата руки.
Цель изобретения - повыщение точности ориентации.
Поставленная цель достигается тем, что 15 рука робота снабжена дополнительным силовым цилиндром, установленным на щтоке основного силового цилиндра и кинематически связанным со схватом.
Сущность изобретения поясняется черте- 20 жом.
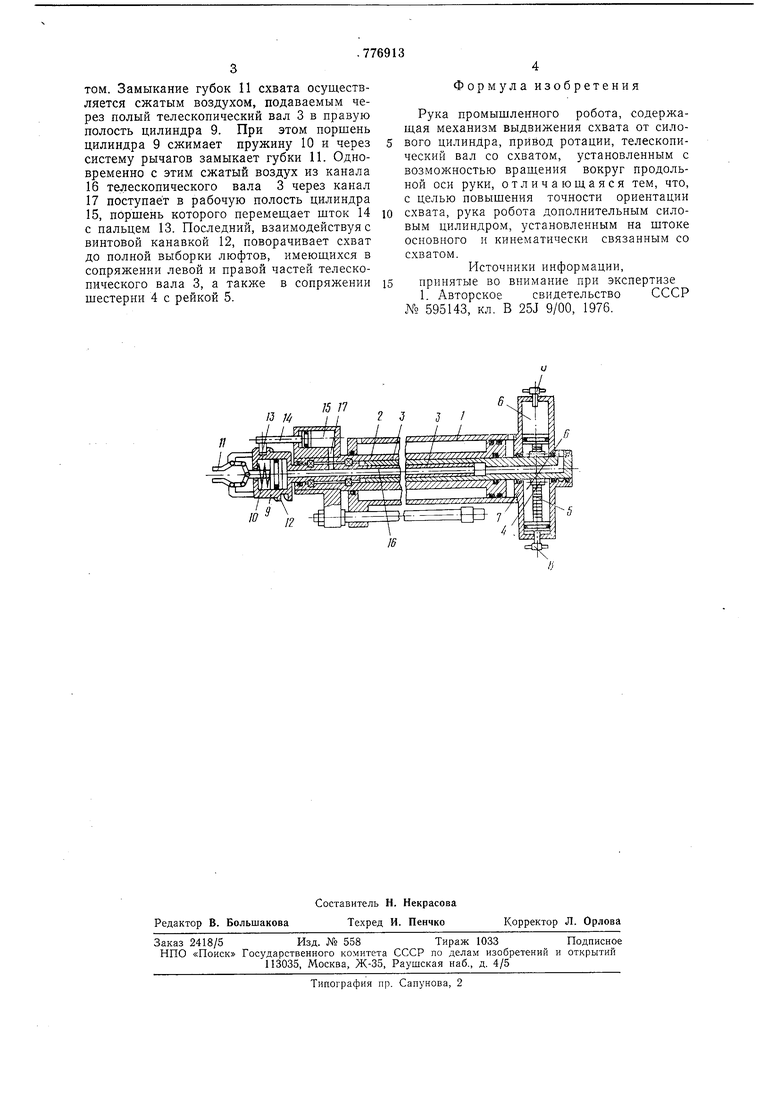
Рука нромыщленного робота содержит механизм выдвижения схвата, состоящий из несущего цилиндра 1 с полым щтоком 2, внутри которого находится нолый теле- 25 скопнческий вал 3 с приводом ротации, состоящим из щестерни 4, находящейся в зацеплении с рейкой 5, перемещаемой порщиями цилиндров 6, установленных на задней крыщке 7 несущего цилиндра 1. Пере- 39
мещение рейки 5 ограничивается регулируемыми упорами 8. На переднем конце телескопического вала 3 закреплен схват, состоящий из цилиндра 9 с пружиной 10, приводящей в движение губки 11.
На корпусе цилиндра 9 выполнена винтовая канавка 12, с которой кинематически связан палец 13, установленный на щтоке 14 дополнительного силового цилиндра 15, установленного на переднем конце полого щтока 2 несущего цилиндра. Диаметр цилиндра 15 значительно меньще диаметра цилиндров 6 привода ротации. Рабочая полость цилиндра 15 связана с магистралью литания привода замыкания схвата, выполненной Б виде канала 16 в телескопическом валу 3, при помощи канала 17 по схеме параллельного включения.
Рука промыщленного робота работает следующим образом.
При подаче сжатого воздуха в одну из полостей цилиндра 1 (например, правую) щток 2 со схватом перемещается в крайнее левое положение, раздвигая телескопический вал 3. При подаче сжатого воздуха в одну из полостей цилиндров 6 иорщень перемещает рейку 5 до одного из уноров 8. При этом поворачивается находящаяся в зацеплении с рейкой 5 щестерня 4, а вместе с ней и телескопический вал 3 со схватом. Замыкание губок 11 схвата осуществляется сжатым воздухом, подаваемым через полый телескопический вал 3 в правую полость цилиндра 9. При этом поршень цилиндра 9 сжимает цружину 10 и через систему рычагов замыкает губки И. Одновременно с этим сжатый воздух из канала
16телескопического вала 3 через канал
17поступает в рабочую полость цилиндра
15, поршень которого перемещает шток 14 с пальцем 13. Последний, взаимодействуя с винтовой канавкой 12, поворачивает схват до полной выборки люфтов, имеющихся в сопряжении левой и правой частей телескопического вала 3, а также в сопряжении шестерни 4 с рейкой 5.
Формула изобретения
Рука промышленного робота, содержащая механизм выдвижения схвата от силового цилиндра, привод ротации, телескопический вал со схватом, установленным с возможностью вращения вокруг продольной оси руки, отличающаяся тем, что, с целью повышения точности ориентации схвата, рука робота дополнительным силовым цилиндром, установленным на штоке основного и кинематически связанным со схватом.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 595143, кл. В 25J 9/00, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука промышленного робота | 1983 |
|
SU1225781A1 |
| Рука циклового робота | 1976 |
|
SU595143A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Рука манипулятора | 1984 |
|
SU1247265A1 |
| Схват промышленного робота | 1984 |
|
SU1250452A1 |
| Очувствленный схват промышленного робота | 1988 |
|
SU1593956A1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Промышленный робот | 1986 |
|
SU1348166A1 |
| Робототехнологический комплекс | 1985 |
|
SU1271742A1 |
| Промышленный робот | 1981 |
|
SU1057267A1 |
