(54) СИСТЕМА ЭКСТРЕМАЛЬНОГО РЕГУЛИРОВАНИЯ СТАНКОМ
ческую функцию - повышение производительности обработки.
Цель изобретения - расширение диапазона регулирования.
Поставленная цель достигается тем, что в систему экстремального регулирования станком, содержащую контур стабилизации мощности резания и включенные последовательно датчик экстремума, первый элемент сравнения и переключатель, выходы которого через запоминающее устройство подключены к первому .и второму входам второго элемента сравнения, выходом соединенного через регулятор оборотов шпинделя со входом контура стабилизации мощности резания, и блок формирования цикла, первый и второй выходы которого подключены соответственно ко второму входу переключателя и к третьему входу второго элемента сравнения, введены задатчик допустимого уровня вибраций и последовательно включенные пороговое устройство и элемент И, второй вход и выход которого соответственно подключены к третьему выходу блока формирования цикла и ко второму входу регулятора оборотов шпинделя, а вход порогового элемента соединен с выходом первого элемента сравнения, ко второму входу которого подключен выход.задатчика допустимого уровня вибраций.
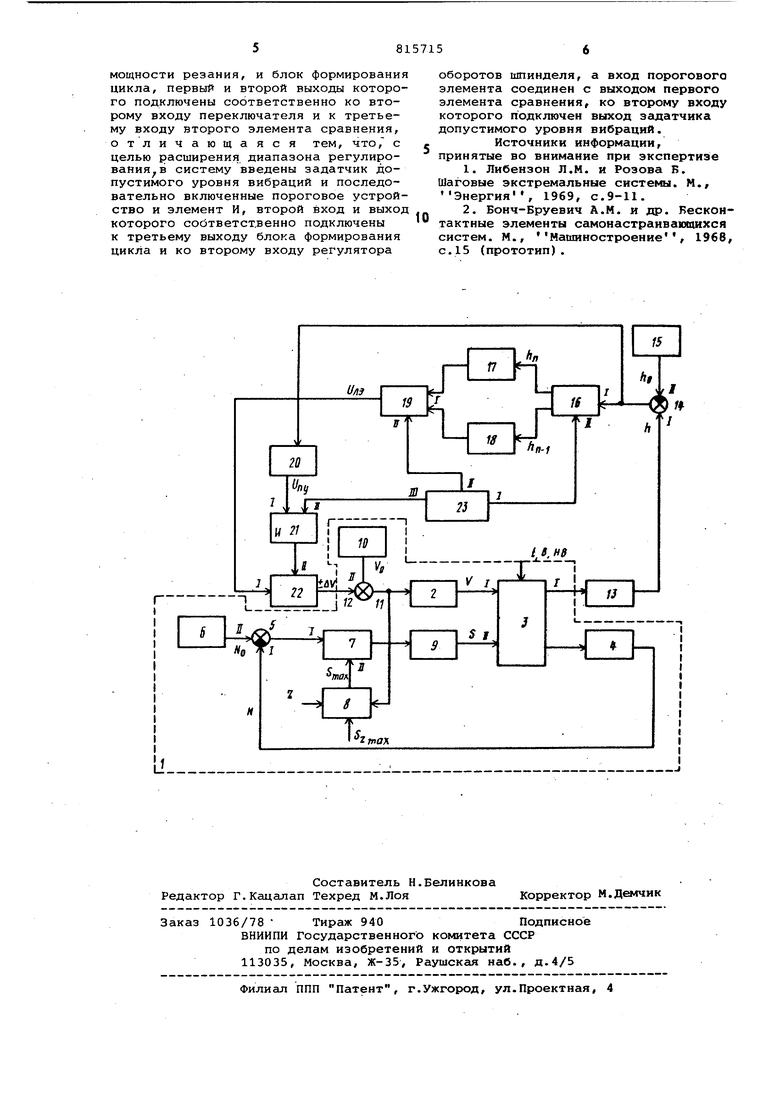
На чертеже представлена функциональная схема системы экстремального регулирования.
Система содержит контур 1 стабилизации мощности, включающий в себя привод 2 главного движения станка, объект 3 регулирования, датчик 4 активной мощности, элемент 5 сравнения задатчик 6 мощности, регулятор 7 подачи, блок 8 ограничения подачи,привод 9подачи, задатчик 10 скорости резания, элемент 11 сравнения, на вход 12 которого подается управляющее воздействие от контура регулирования величины амплитуды вибраций, содержащего датчик 13 экстремума, первый элемент 14 сравнения, задатчик 15 допустимого уровня вибраций, переключатель 16, запоминающие устройства 17 и 18,второй элемент 19 сравнения, пороговый элемент 20,элемент 21 И, регулятор 22 оборотов шпинделя и блок 23 формирования цикла.
Система работает следующим образом.
До врезания уровень вибраций h незначителен и намного меньше предельно допустимого уровня hp, задатчика 15. Блок 23 подает команды на управляющие входы переключателя 16, элемента 19 и на второй вход элемента 21 И, однако от регулятора 22 на вход 12 сигналы не проходят, так как элемент 20 подает на первый вход элемента 21 И нулевой сигнал, вследствие чего регулятор 22 заблокирован нулевым сигналом элемента 21 И. Таким образом, до момента врезания на привод 2 подается сигнал задатчика 10.
При замыкании системы повышается уровень вибраций и, как. только он 5 превысит уровень hj,, на выходе элемента 14 появляется сигнал, от определенной величины которого срабатывает элемент 20, выходной сигнал которого разрешает прохождение коO манд блока 23 на вход регулятора 22.
В следующий интервал времени At производится фиксация уровня вибраций hfi объекта 3, который затем сравнивается с уровнем вибрации hn-t
5 в предыдущий отрезок времени. После сравнения на элемент 19 и регулятор 22 от блока 22 приходят команды на движение системы.
Допустим, что первый шаг л V приQ вел к увеличению вибрации. В этом случае система изменяет знак управляющего воздействия 4V на обратный,в результате чего система начинает движение к минимуму вибраций. После каждого шага фиксации нового состояния и сра.внения двух состояний
(нового и предыдущего) элемент 19 не изменяет знак воздействия на регулятор 22, а, следовательно, и направление движения системы. В момент
0 времени как только bi Ьд , элемент 20 отключается и команды от блока 23 на регулятор 22 не проходят. Регулятор фиксирует посл.еднее состояние объекта 3,
5 Контур стабилизации мощности работает обычным образом: в момент tg появляется сигнал датчика 4, который вычитается из задающего сигнала в элементе 5, формирующем сигнал расQ согласования, в зависимости от знака которого регулятор 7 увеличивает или . уменьшает подачу S , коменсируя отклонение мощности от NQ, В процессе изменения числа оборотов шпинделя предельно допустимая подача SmaA
корректируется при помощи блока 8,
Преимущество предлагаемой системы заключается в защите станка от вибраций, в повышении надежности и долговечности работы станка и инструмента.
Формула изобретения
Система экстремального регулирования станком, содержащая контур стабилизации мощности резания и включенные последовательно датчик экстремума, первый элемент сравнения и переключатель, выходы которого через запоминающее устройство подключены к первому и второму входам второго элемента сравнения, выходом соединенного через регулятор оборотов шпинделя со входом контура стабилизации
мощности резания, и блок формирования цикла, первьй и второй выходы которого подключены соответственно ко второму входу переключателя и к третьему входу второго элемента сравнения, отличающаяся тем, что, с целью расширения диапазона регулирования в систему введены задатчик допустимого уровня вибраций и последовательно включенные пороговое устройство и элемент И, второй вход и выход которого соответственно подключены к третьему выходу блока формирования цикла и ко второму входу регулятора
оборотов шпинделя, а вход порогового элемента соединен с выходом первого элемента сравнения, ко второму входу которого подключен выход згщатчика допустимого уровня вибраций. Источники информации, принятые во внимание при экспертизе
1.Либенэон Л.М. и Розова В, Шаговые экстремальные системы. М., Энергия, 1969, с.9-11.
2.Бонч-Бруевич A.M. и др. Весконтактные элементы самонастраивающихся систем. М., Машиностроение, 1968, с.15 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Система экстремального регулирования уровня вибраций на металлорежущем станке | 1982 |
|
SU1013909A1 |
| Система экстремального регулирования амплитуды вибраций на металлорежущем станке с выдвижным шпинделем | 1985 |
|
SU1352453A1 |
| Система экстремального управления металлорежущими станками | 1979 |
|
SU926618A1 |
| Система адаптивного управления | 1983 |
|
SU1133583A1 |
| Способ ограничения вибраций на металлорежущем станке и устройство для его осуществления | 1985 |
|
SU1278815A1 |
| Система адаптивного управления металлорежущим станком | 1981 |
|
SU996997A1 |
| Устройство для адаптивного управ-лЕНия CTAHKOM | 1979 |
|
SU834673A1 |
| Система адаптивного управления металлорежущим станком | 1985 |
|
SU1303996A2 |
| Система адаптивного управления металлорежущим станком | 1980 |
|
SU1001013A1 |
| Адаптивная система управления фрезерным станком | 1982 |
|
SU1041990A1 |
ЙЛ-CZH
Р
I t,H6
т -i
