(54) ЛОВИТЕЛЬ КАБИНЫ ЛИФТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Ловитель кабины лифта | 1976 |
|
SU569519A1 |
| Предохранительное устройство для строительного подъемника | 1981 |
|
SU988732A1 |
| Устройство для стабилизации лихтеров в кормовом проеме лихтеровоза | 1980 |
|
SU965888A1 |
| Устройство для предотвращения аварийного падения кабины пассажирского лифта | 2024 |
|
RU2837921C1 |
| Грузозахватная траверса | 1976 |
|
SU645920A1 |
| Устройство для передачи людей и грузов в море с обслуживающей платформы на судно | 1981 |
|
SU954320A1 |
| Устройство для установки в боксы автомобилей в многоэтажных автоматизированных гаражах | 1990 |
|
SU1825866A1 |
| Судовое грузовое устройство | 1978 |
|
SU745767A1 |
| Ловитель кабины лифта | 1977 |
|
SU648499A1 |
| Механизм аварийной остановки кабины лифта | 1988 |
|
SU1631018A1 |
Изобретение относится к грузоподъемным устройствам, в частности к лифтам для безударной передачп людей и грузов в морских условиях за бортом.
Известен ловитель кабины лифта, содержащий :кор.пус, в котором раоположены захватные .КОЛОДКЕ, ооеди-ненные посредством двуплечих рычагов с тягами привода замыкания лолодок, взаимодействующих с направляющим «анатом, пропущенным через клюзы коромысла, к концам которого прикреплены вертикальные штанги, проходящие через обоймы, расположенные на поперечине 1.
Однако этот ловитель малонадежен в работе.
Цель изобретения - повышение надежности.
Для этого в корпусе установлены дополнительные колодки, соединенные с помощью осей с захватными колодками.
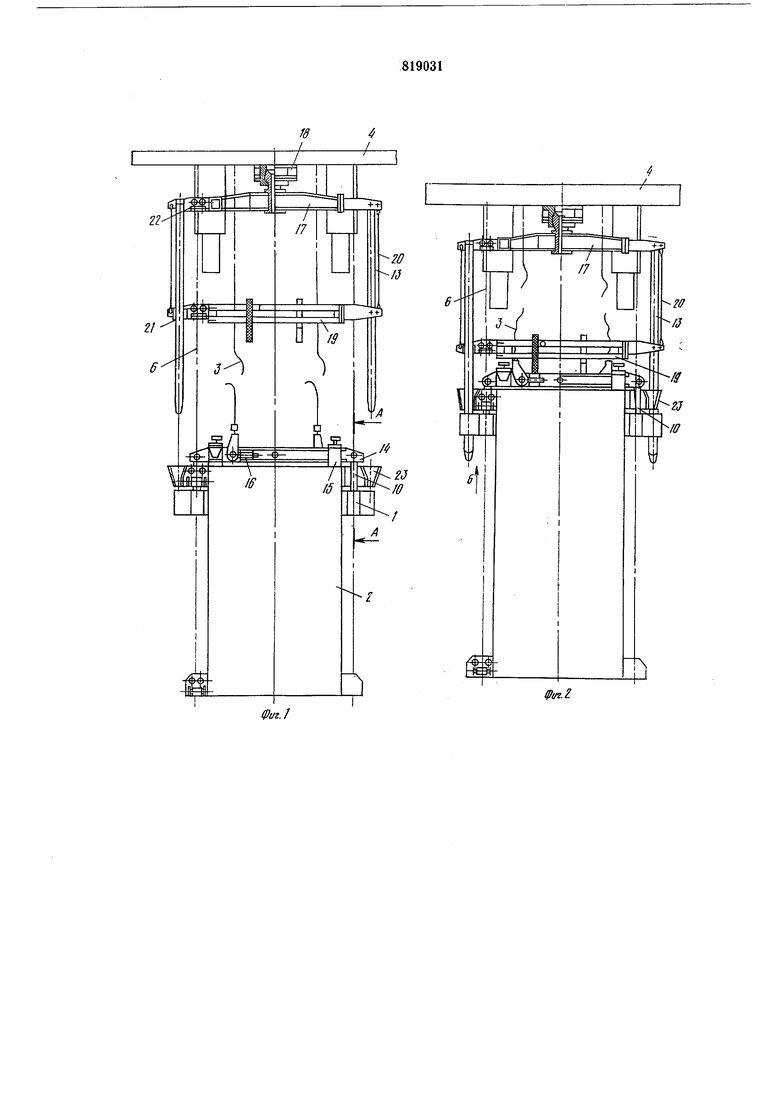
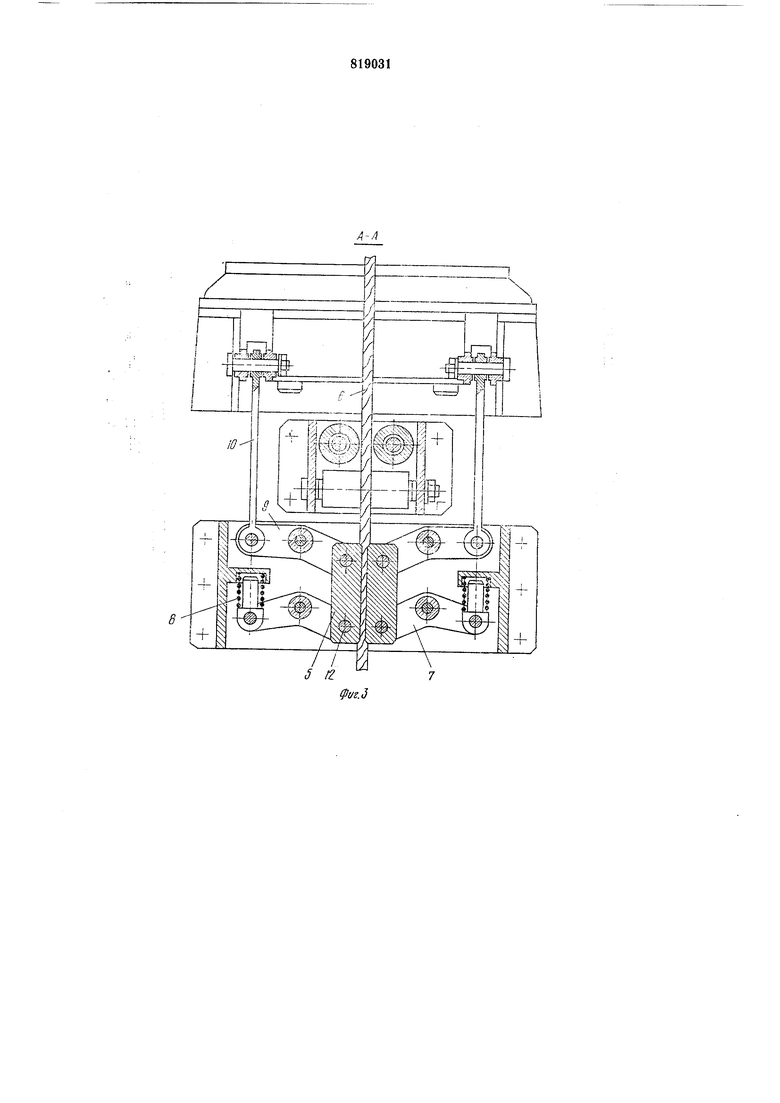
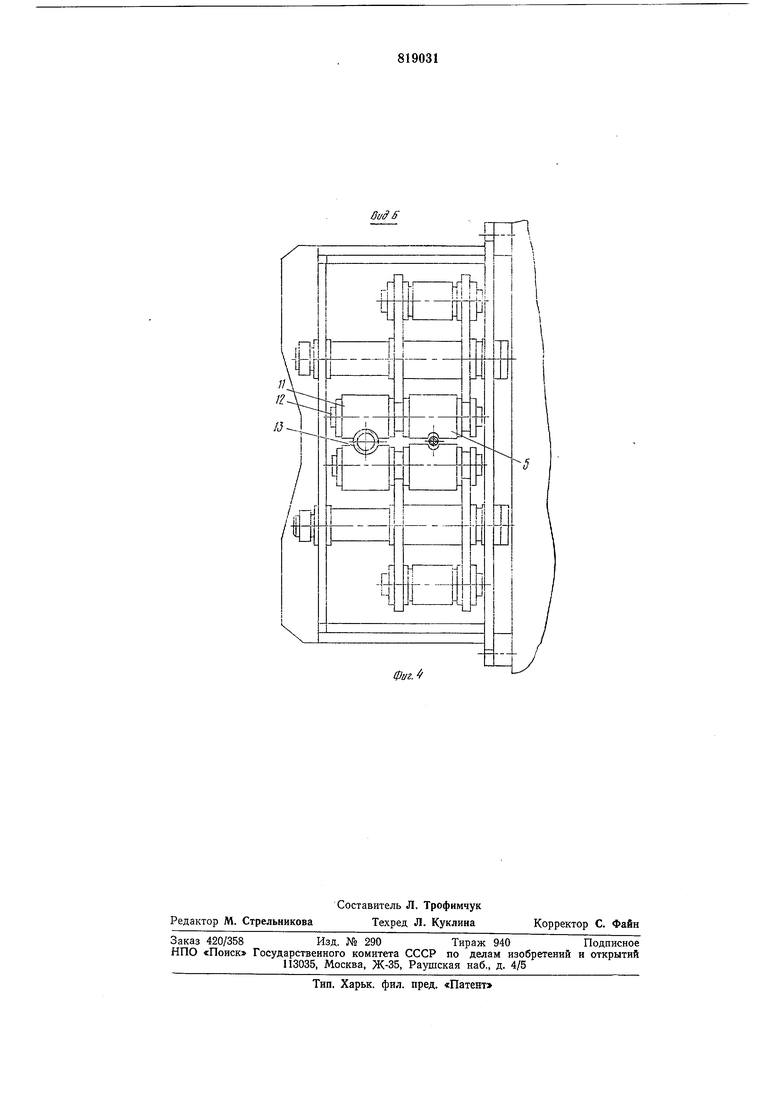
На фиг. 1 изображен ловитель со стороны борта, когда грузовые канаты оборваны, а захваты ловителей кабины замкнуты «а направляющих канатах; на фиг. 2 - то же, когда кабина лифта, зависшая после обрыва грузовых канатов яа направляющих канатах, поднята последними в процессе слежения за волной в опасную зону, дополнительные захваты замкнуты на штангах привода размыкания, а основные захваты, взаимодействующие с напрявляюшими канатами, разомкнута; на фиг. 3 - х: чение Л-А фиг. 1; на фиг. 4 - вид Б фиг. 2.
Ловитель включает jsopoyc 1 с захватами и привод замыкаашия захватов, установленных на кабине 2 лифта, лодвешенной на грузовых канатах 3 грузовой стрелы 4, а также привод размыкания захватов, смонтированный на ноке грузовой стрелы.
8корпусе 1 расположены колодки 5, взаимодействующие с направляющими канатами 5 и связанные через двуплечие рычаги 7 с пружинами 8, а через двуплечие рычаги
9с тягами 10 привода замыкания захватов.
В корпусе также имеются дополнительные захваты, например колодки 11, соединенные посредством осей 12 с колодками 5 и взаимодействующие со щтангами 13 привода размыкания захватов.
Привод замыкания захватов представляет собой подвижную раму 14, перемещающуюся в ограничителях 15, установленньш на ка|би1ны 2, и связанную тягами 10 с захватами. К средней части рамы щарнирно прикреплена грузовая траверса 16, соединенная с грузовыми канатами 8.
Привод размыкання захватов выполнен в виде щариирного параллелограмма, состоящего из коромысла 17, укрепленного
на ноке стрелы 4 шарниром 18, поперечины 19, свободно подвешенной на гпбкнх связях 20 к коромыслу, двух штанг 13, верхнне концы которых шарнирно соединены с коромыслом и свободно проходят через обоймы 21, шарнпрно закрепленные на поперечине.
Через клюзы 22 в коромысле 17, в поперечине 19 и на кабине 2 свободно пропущены направляюидне канаты 6 лифта.
Для надежного попадання штанг 13 между колодкамн // перед ннми установлены направляющие 23. С целью надежного заклинивания колодок // на штангах 13 благодаря повышению коэффициента трения между ннми рабочие поверхности штанг и захватов нмеют фигурный, соответствующий друг другу профиль.
Ловитель работает следующим образом.
При обрыве грузовых канатов 3 грузО|Вая траверса 16 и 1рама .14 за счет своей массы падают на крышку кабины 2. Под действием тяг 10 и пружины 8 колодки 5 проворачиваются на осях двуплечих рычагов 7 и 9 и сближаются, охватывая направляющие канаты. Вместе с ними сближаются также колодки //. Затем направляющие канаты 6 продолжают заклиниваться благодаря силе трения между колодкамн 5 и канатами 6 н массе кабины 2. Последняя перемещается с направляющими канатами, следящимн за перемещением в судне на Болне. Если кабина осуществляет посадку на направляющие канаты на расстоянии от грузовой стрелы, меньшем чем высота волны, то при перемещении кабины с направляющими канатами вверх щтанги 13, взаимодействуя с донолнительными колодками /Л разводят их, а вместе с ннми расходятся и колодки 5, освобождая направляющие канаты 6. Под действием силы инерции кабина 2 поднимается по щтангам 13 на некоторую высоту, а затем .начинает опускаться.
При этом с помощью сил трения между колодками У/ н щтангами 13 происходит заклинивание штанг.
После того как ликвидируется обрыв грз зовых канатов 5 и их нривод начинает работать на подъем, грузовая траверса 16 и рама 14 поднимаются под действием уси.чия. Связанные с ннми тяги 10, преодолевая силы пружины 8, поворачивают двуплечие рычаги 7 и 9. Колодки 5 и // расходятся, и кабина может свободно подниматься н опускаться.
Предлагаемый ловитель повышает надежность работы лифта и безопасность людей в результате предотвращения возникновения ускорений, превышающих допустимые нормы при обрыве грузовых канатов на участке взаимодействия со щтангами.
Формула изобретения
Ловитель кабины лифта, содержащий корпус, в котором расположены захватные колодки, соединенные посредством двуплечих рычагов с тягами привода замыкания колодок, взаимодействующих с направляющим канатом, пропущенным через клюзы коромысла, к концам последнего прикреплены вертлкалнные штанги, проходящие через обоймы, расположенные на поперечине, отличающийся тем, что, с целью повышения надежности, в корпусе установлены дополнительные колодки, соединенные с помощью осей с захватными колодками.
Источник информации, принятый во внимание при экспертизе:
Dudff
фигЛ
