Устройства для автоматической транспортировки изделий в процессе их изготовления, состоящие из сети путей, по которым принудительно перемещаются тележки, несущие обрабатываемые изделия, известны. Однако в таких известных устройствах необходимо принудительно вести телелску на протяжении всей трассы, а также принудительно направлять ее на необходимый путь.
В предлагаемом устройстве эти недостатки устранены тем, что тележка на основных линейных участках движется гравитационно за счет наклона путей, а в местах перехода с одного участка на другой поднимается специальным компенсатором потерянной высоты - полочным элеватором.
Направление тележки на тот или иной путь осуществляется автоматически при взаимодействии установленных на тележке подвижных штифтов с аппаратурой управления электрооборудованием путевых механизмов.
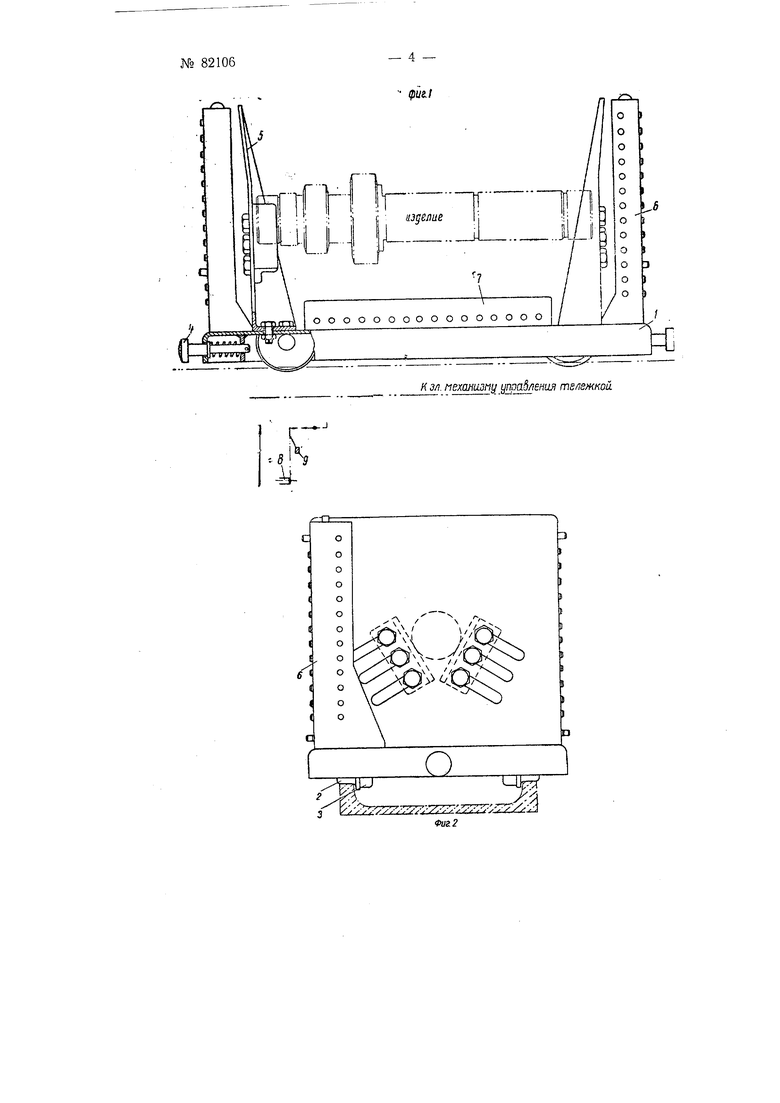
На фиг. 1 и 2 изображена в двух проекциях тележка для изделий; на фиг. 3 н 4 схематически изображен участок обработки изделия в двух проекциях; на фиг. 5 изобр.ажен цепной сталкиватель; на фиг. 6 и 7-схема направляющей при опущенной и поднятой стрелке; на фиг. 8 и 9 - схематически показана подача изделий к станкам в двух проекциях, приче.м на фиг. 9 изображен разрез по АА на фиг. 8.
Технологическое оборудование, на котором производится обработка изделий, устанавливается в соответствующем порядке с подразделением на участки. Каждый из участков имеет свое групповое распределительное устройство, обеспечивающее передачу изделий: на станки этого участка, на другие участки цеха, в другие цеха, склады и проч.
Транспортировка изделий осуществляется тележками (фиг. и 2), передвигающимися по системе путей. Тележка / состоит из щтампованкой рамы и двух пар колес 2. Для ограничения скорости тележки при гравитационном перемещении на колесах имеются центробежные тормоза 3. Пружинные буфера 4 обеспечивают смягчение ударов между тележками. К раме тележки крепятся стойки 5, имеющие переставные опорные планки для установки разных изделий. Каждая тележка снабл :ена кнопочными штифтовыми пультами 5 и 7, щтифты которых воздействуют на путевые механизмы во время движения тележки. При перемещении по пути гнтифт 8 включает конечный электровыключатель 9, с помощью которого производится воздействие иэ тот или иной путевой механизм - поворотный круг, стрелку, сталкиватель и проч.
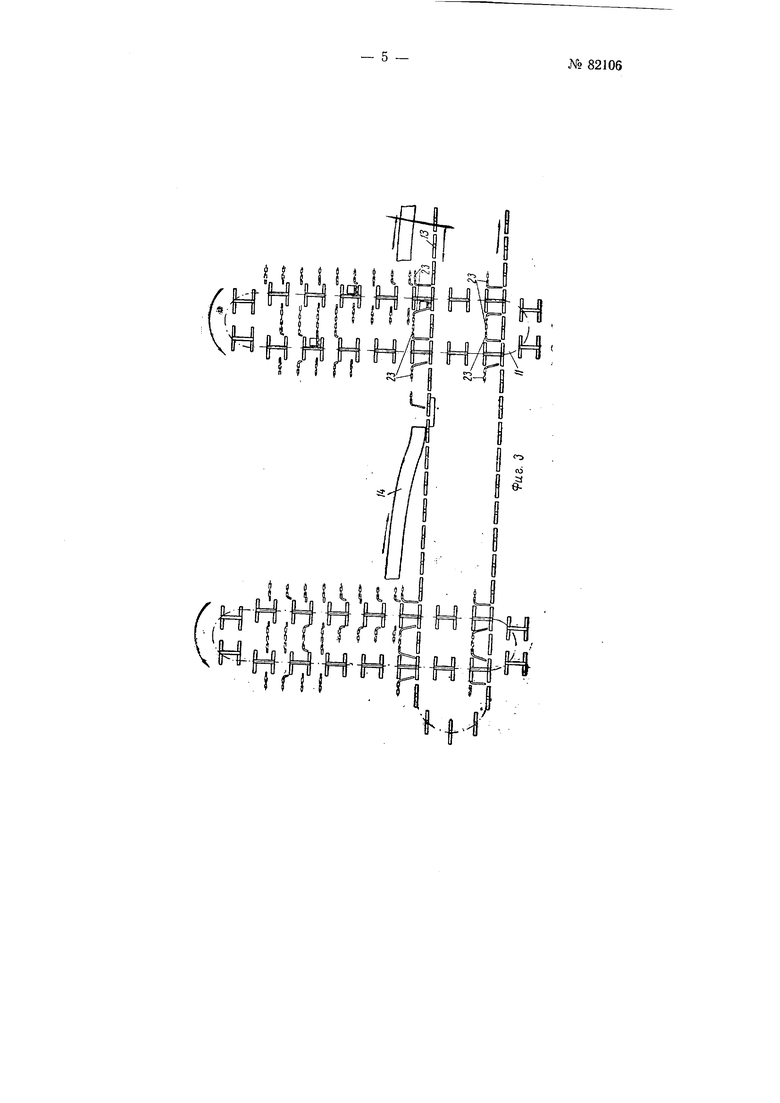
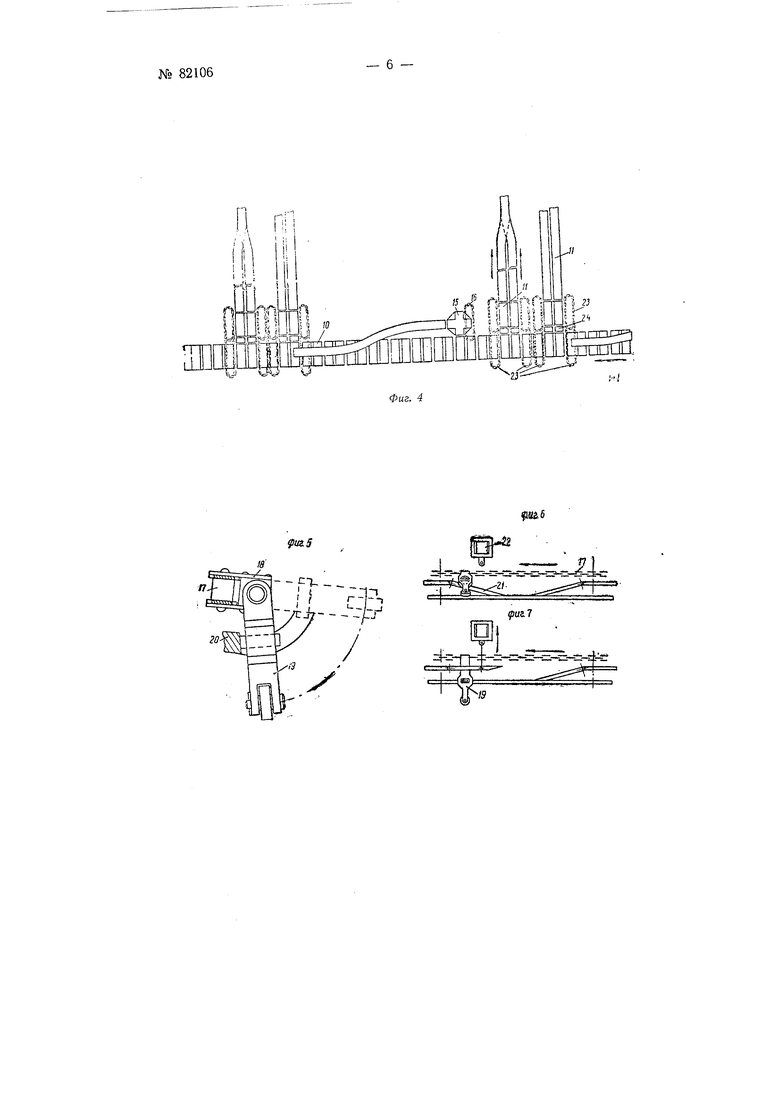
Транспортное оборудование участка (фиг. 3 и 4) состоит из комбинации горизонтального транспортера 10, полочных элеваторовподъемников 11 и наклонных путей 12, идущих к станкам (фиг. 8 и 9).
Горизонтальный транспортер 10 нериодического действия имеет несущий орган в виде отдельных пластин (столиков) 13. На рельсовые пути каждого столика могут устанавливаться по одной, две и более тележек. Для обеспечения тождественного расположения тележек на нижней и верхней ветви транспортера столики к цепям укрепляются с помощью щарниров. Точность щага достигается наличием в звеньях шарикоподщипников.
С одной стороны горизонтального транспортера 10 располагаются полочные элеваторы 11.
На каждую иолку может быть установлено по несколько тележек. Для обеспечения точности сопряжения путей полки со станочными путями и с пластинами горизонтальиого транспортера устанавливаются направляющие планки.
Периодическое передвижение горизонтального транспортера и подъемпиков осуществляется от центрального привода (на чертеже не показан).
Каждая ветвь иодннмающейся части подъемника питает две группы наклонных путей 12, идущих к станкам.
Тележка, на которую уложено изделие для обработки, но транспортному пути 14 направляется на соответствующий участок. С пути 14 тележка переходит на разгрузочных круг 15. Круг, повернув тележку на 90°, с помощью цепного сталкивателя 16 перемещает ее на горизонтальный транспортер.
Цепной сталкиватель 16 (фиг. 5) представляет собой бесконечную цепь 17, к которой с помощью накладок 18 укреплен щарнирио хвостовик 19. Хвостовик имеет два ролика. Один ролик катается по направляющим 20, другой ролик предназначен для сталкивания тележки. В случае, если позиция горизонтального транспортера 10 будег занята другой тележкой, стрелка направляющей 21 (фиг. 6 и 7) с помощью электромагнита 22 будет поднята, хвостовик 19 останется в опущенном положении и пройдет мимо тележки.
Тележка с горизонтального транспортера 10 при помо1ци цепного сталкивателя 23 переводится на полку элеватора или цепосре.з,ственио, или через переходную площадку 24.
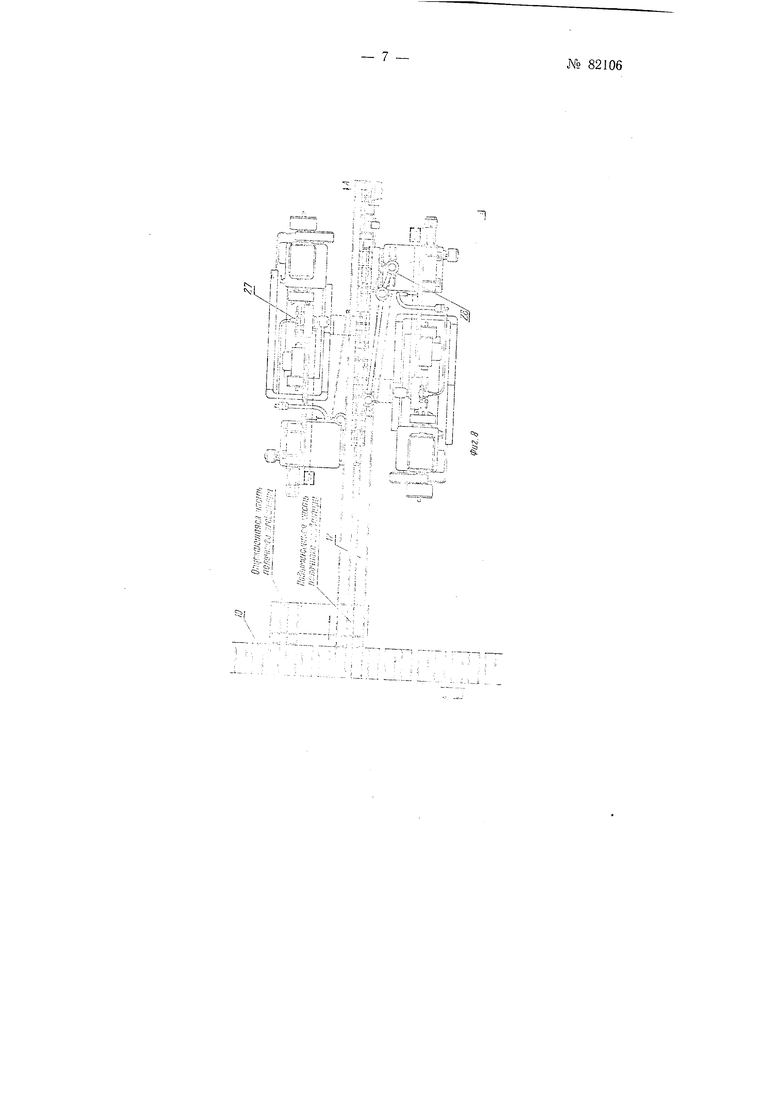
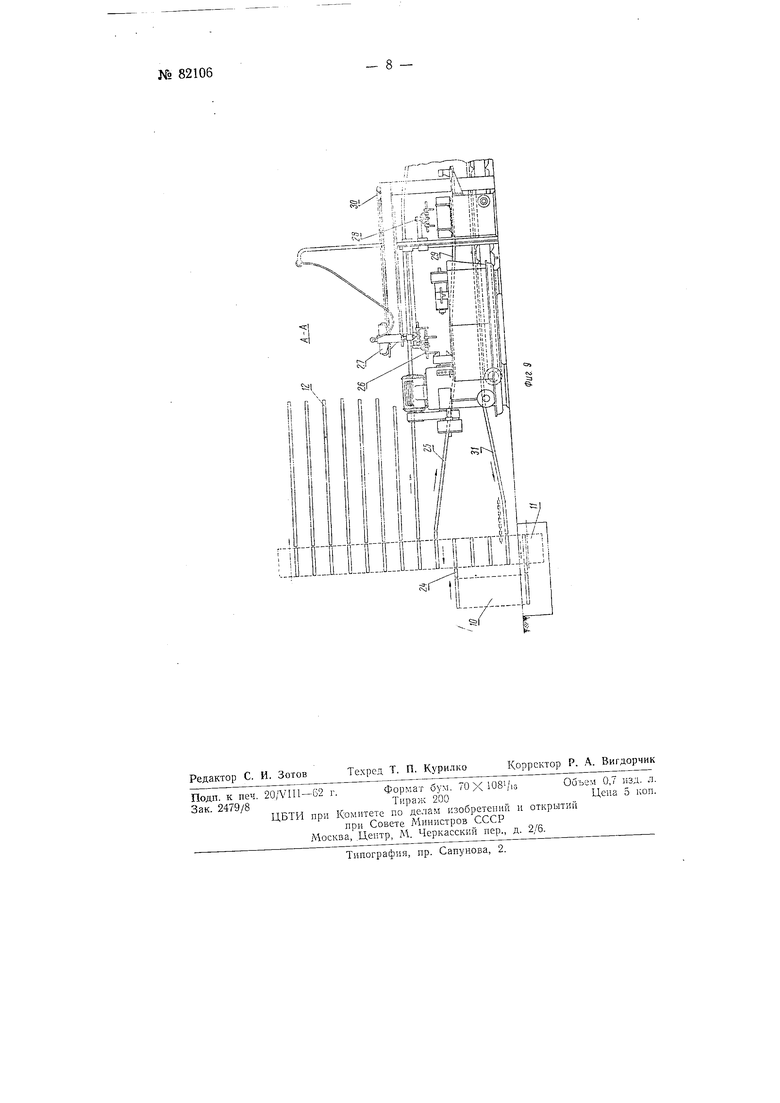
Полочным элеватором-подъемником тележка поднимается до определенного уровня той транспортной линии путей 12, на которую она должна поступить к соответствующему станку. Тележка, попав на путь 25 станка (фиг. 9), останавливается на том месте, где происходит ее разгрузка и загрузка изделия в станок. Процесс загрузки, а затем передача изделия со станка на контрольный автомат ц далее опять на тележку осуществляется с помощью автоматических рук 26, 27, 28. В то время, когда на станке производится обработка изделия, тележка
- 3 -Ло 82106
по наклонному вспомогательному пути у станка попадает на спускающуюся стрелку 29.
В тележку рукой 28 загружается изделие, с помощью толкателя 30 она опускается по стрелке на общий обратный путь 31, ведущий к полочному элеватору для дальнейшего ее направления или на один из станков этой же группы, или через горизонтальный транспортер на другие группы станков, расположенных в этом же участке. В случае, если изделие должно быть направлено в другие места производства (цеха, склады, на сборку и проч.), тележка поступает на один из вспомогательных транспортных путей, ведущих к месту ее назначения.
Штифтовые пульты, которыми оборудованы тележки, обеспечивают управление путевыми механизмами, а следовательно, марщрут гележки будет всегда точно соблюден. .
Настройка кнопочных штифтовых пультов производится автоматически на позиции загрузки тележек изделиями при помощи специальных контрольных автоматов. В случае отсутствия контрольного автомата эта настройка может быть произведена в пункте загрузки изделия в тележку автоматической рукой, переносящей изделие со станка.
Система настройки пультов позволяет осуществлять передачу изделий не только в разные цеха, но и в случае наличия брака па склад брака или в мастерскую исправления брака. По исправлении брака изделие па тележке передается в общий автоматизированный поток для дальнейшей обработки.
Загрузка полуфабриката на тележки может производиться поштучно - если это крупные изделия, или навало.м, если изделия поступают в бункер стапка. При укладке изделий по несколько щтук в телел ку их выгрузка и загрузка производятся автоматической рукой, пальцы которой специально приспособлены для этой цели.
Предмет изобретения
1.Устройство для автоматической транспортировки изделий по заданной трассе, отличающееся те.м, что оно заключает в себе: сеть имеющих уклон путей, по которым от станков или к станкам гравитационно пере.мещаются тележки с размещенными па них изделиями; связывающие отдельные линии путей периодически движущийся горизонтальный транспортер и расположенные в произвольных точках трассы транспортера полочные элеваторы, служащие для распределения тележек па различные линии путей, а также и для компепсации потерянной высоты.
2.Устройство по п. 1, отличающееся тем, что, с целью произвольного направления тележки к тому или иному станку, на тележке установлен кнопочный пульт с системой выдвигаемых штифтов, управляющих электрооборудованием путевых механизмов. ооооооооооооооо фиг. I изделие I;
я л. 1 прадленш ms/je f ou о
| название | год | авторы | номер документа |
|---|---|---|---|
| Поточная линия для производства изделий верхнего трикотажа | 1978 |
|
SU958539A1 |
| Межоперационный склад цилиндричес-КиХ издЕлий | 1979 |
|
SU821327A1 |
| АВТОМАТИЗИРОВАННАЯ ЛИНИЯ РЕЗКИ СЛИТКОВ ТИПА ТЕЛ ВРАЩЕНИЯ НА ЗАГОТОВКИ И ИХ ТРАНСПОРТИРОВКИ | 1996 |
|
RU2108187C1 |
| Устройство для изготовления керамических изделий | 1951 |
|
SU94644A1 |
| ТРАНСПОРТИРОВОЧНАЯ СИСТЕМА, ТРАНСПОРТИРОВОЧНАЯ ТЕЛЕЖКА И СПОСОБ ТРАНСПОРТИРОВКИ МЕТАЛЛИЧЕСКИХ РУЛОНОВ | 2011 |
|
RU2576972C2 |
| Кассетно-транспортное устройство | 1983 |
|
SU1098868A1 |
| Устройство для транспортирования и распределения грузов по нескольким точкам | 1959 |
|
SU125510A1 |
| Поточная линия для производства трикотажного полотна | 1981 |
|
SU1306991A1 |
| Однолюлечный транспортер | 1951 |
|
SU94611A1 |
| АВТОМАТИЗИРОВАННЫЙ ЦЕХ ДЛЯ ИЗГОТОВЛЕНИЯ ИЛИ РЕМОНТА ЖЕЛЕЗНОДОРОЖНЫХ КОЛЕСНЫХ ПАР | 1999 |
|
RU2165835C1 |
с ( ( 1 ( ( (
о о о о о о о о о о о о
г
- /
}/t vr.vh
fi&5
|gU22
ffl
1 ЧЧ
е
cat Л
- 3i i
i iU-i; «u-irTlJ iif°
L,iilJ-J-J-JJi-J
лi И
