Изобретение относится к машиностроению и может быть использовано в манипуляторах и автооператорах дл работы с хрупкими и легкодеформируемыми деталями.
Целью изобретения является повышение надежности работы с хрупкими и легкодеформируемыми деталями за счет комбинированного захвата за большую площадь как зажимными губками, так и вакуумным присосом.
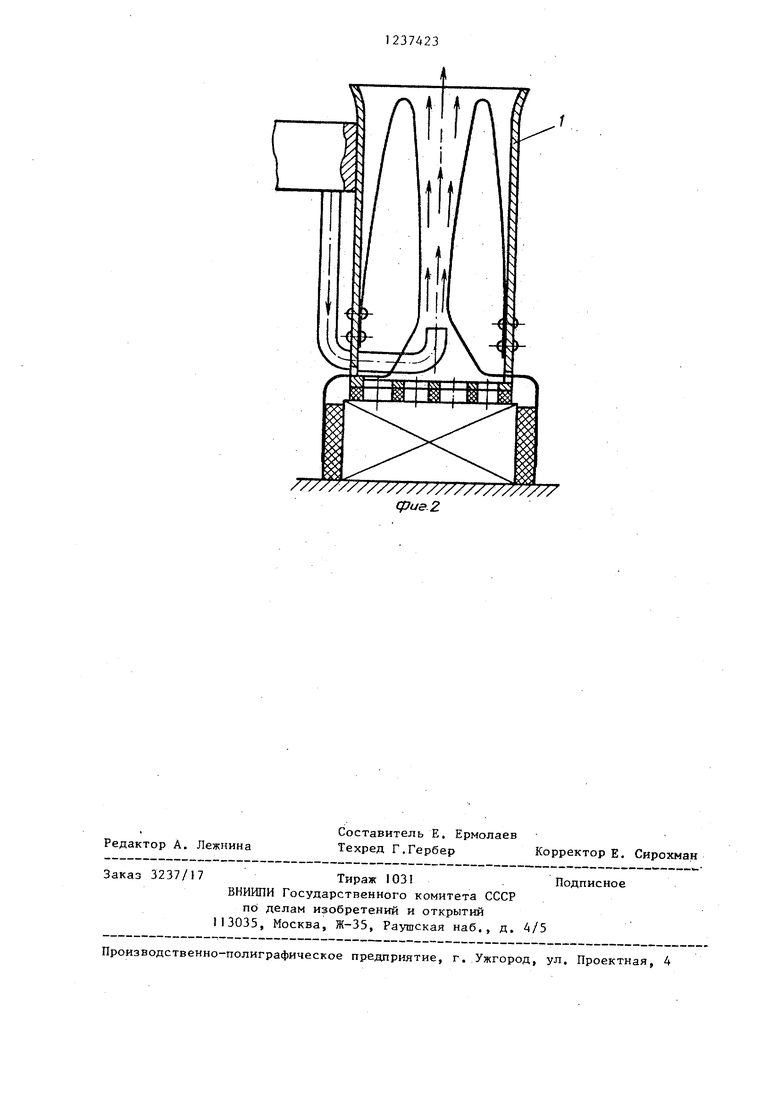
На фиг. 1 изображено захватное устройство в положении перед захватом объекта, разрез; на фиг. 2 - то же с захваченным объектом.
Захватное устройство содержит полый выполненный в виде стакана корпус I, на боковых стенках которого закреплены упругие ленты 2, имеющие на концах эластичные губки 3, Внутри корпуса между упругими лентами 2 установлено силовое сопло 4. Торец корпуса со стороны губок закрыт перфорированной пластиной 5, облицованной эластичным слоем 6.
Устройство работает следующим образом.
Захватное устройство подводят к объекту 7 сверху так, чтобы между пластиной 5 и поверхностью детали остается зазор а для исключения возможного удара при динамических колебаниях руки манипулятора, по этой же причине между концами губок 3 и опорной поверхностью 8, на которой лежит объект 7, оставляют зазор Ь. Объект 7 расположен между губками 3 с зазором (- , Воздух по237Д232
дают под давлением к соплу 4. Струя его проходит между лентами 2, создавая область пониженного давления. Под действием разности давлений лен5 ты 2 прогибаются по направлеьгию к центру струи, губки 3 зажимают объект 7. В то же время под действием струи воздуха из сопла происходит реактивное движение захватного уст 0 ройства вниз в пределах упругих деформаций руки манипулятора, при этом выбирается зазор Ь , поверхность объекта сближается с перфорированной пластиной 5, под которой
5 образуется зона пониженного давления одновременно с подачей воздуха под давлением к соплу 4 (воздух всасывается в корпус захватного устройства через отверстия пластины 5,
20 возникает зжекторный эффект). В следующий момент времени объект притягивается к пластине 5. В отверстиях пласт ины 5 образуется вакуум, обеспечивающий частичное или полное удер жание объекта. Таким образом, удержание объекта осуществляется не только за счет сил трения от зажима губками, но и за счет присоса к пластине 5, что увел1гчивает активную
30 площадь захвата и снижает концентрацию нагрузки на объекте от схва- та манипулятора.
Предлагаемое устройство позволяет надежно работать с хрупкими и
35 легксдеформируемыми деталями за счет комбинированного захвата за больщую площадь как зажимными губками, так и вакуумным присосом.
//////////777//////////7//// Срие.2
Редактор А. Лежнина
3237/17
Тираж 1031 ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Составитель Е. Ермолаев Техред Г.Гербер
Корректор Е. Сирохман
Подписное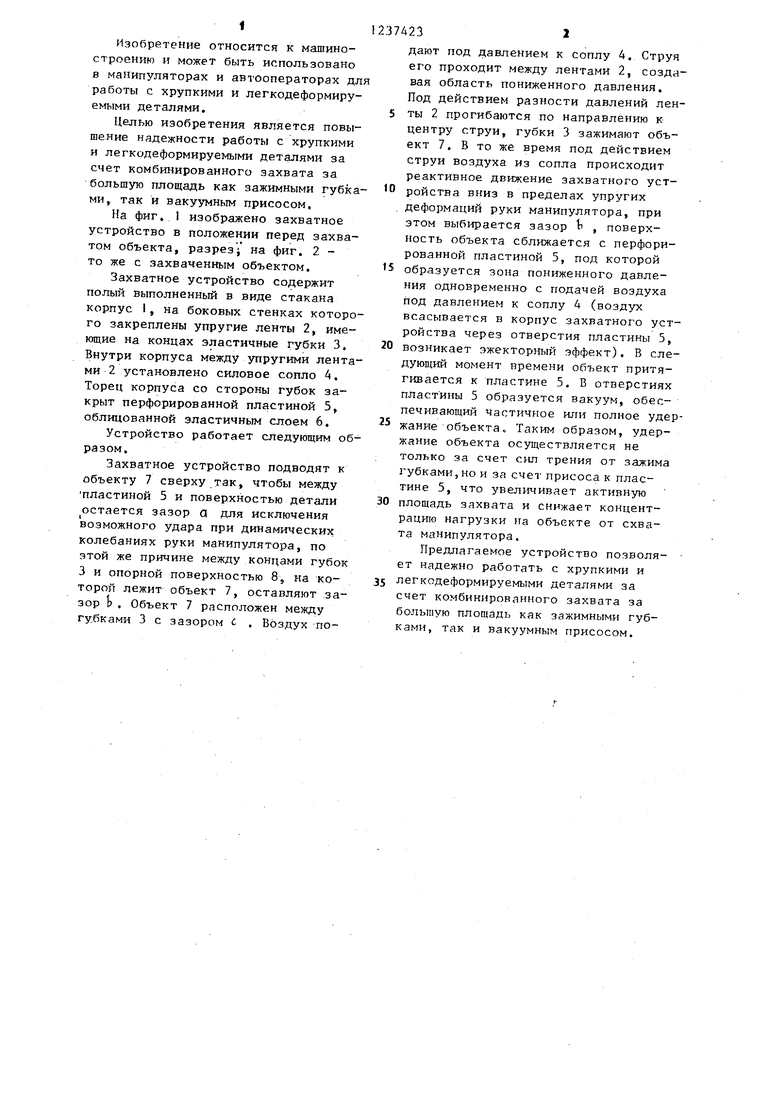
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| Манипулятор для герметизированного пространства | 1988 |
|
SU1618651A1 |
| Захватное устройство промышленного робота | 1985 |
|
SU1313697A1 |
| ЗАХВАТ, В ЧАСТНОСТИ ЗАХВАТ БЕРНУЛЛИ | 2008 |
|
RU2466857C2 |
| Захватное устройство | 1984 |
|
SU1212781A1 |
| Схват промышленного робота длябОбиН C пРяжЕй | 1979 |
|
SU806406A1 |
| Захватное устройство | 1985 |
|
SU1316814A1 |
| Захватное устройство | 1987 |
|
SU1407798A1 |
| Захватное устройство | 1981 |
|
SU971647A1 |
| Автоматизированный технологический комплекс для прессования изделий из порошков | 1991 |
|
SU1801048A3 |

| Захват промышленного робота | 1977 |
|
SU639700A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
