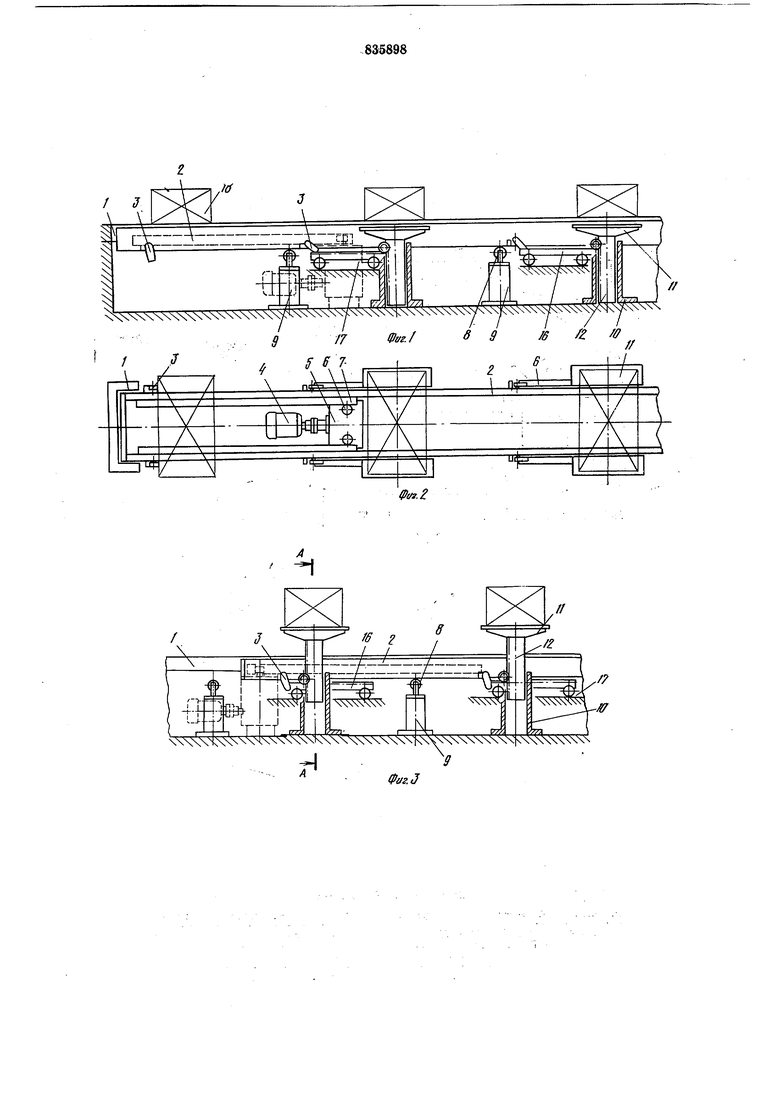
Шагающий конвейер содержит неподвижную раму 1, подвижную раму 2 с упорами
3,шарнирно закрепленными на ней, привод перемещения подвижной рамы, состоящий из электродвигателя 4, редуктора 5, связанного посредством зубчатых колес 6 с рейками 7, закрепленными на подвижной раме 2.
Подвижная рама 2 установлена на роликах 8 приводов 9 ее подъема.
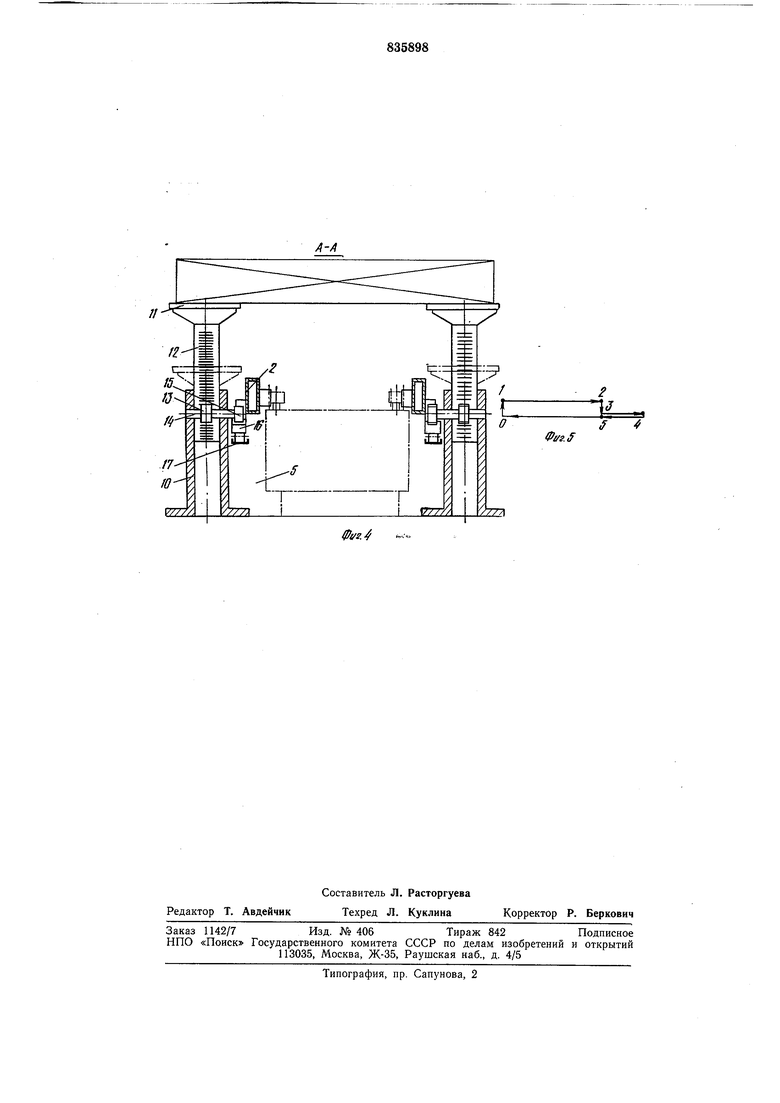
В неподвижных вертикальных направляющих 10 установлены выдвижные платформы 11, каждая из которых содержит шток 12 с зубчатой рейкой, связанной с шестерней 13 блока шестерен 14, вторая шестерня 15 которого находится в зацеплении с реечной кареткой 16, установленной на направляющих 17 и взаимодействующей с упорами 3.
Транспортируемый груз 18 устанавливается на неподвижную раму 1.
Шагающий конвейер работает следующим образом.
В исходном положении (фиг. 1, 2) подвижная рама 2 находится в крайнем левом положении, что соответствует т. О на циклограмме (фиг. 5).
Для подъема подвижной рамы 2 включают приводы 9, которые приподнимают ее вместе с грузом 18 выше уровня неподвижной рамы, что соответствует т. 1 на фиг. 5. После этого включается электродвигатель
4,который через редуктор 5, зубчатые колеса 6, находящиеся в Зацеплении с рейками 7, перемещает подвижную раму 2 с грузом 18 по роликам 8 на величину шага конвейера. При этом груз 18 оказывается над выдвижной платформой И, что соответствует т. 2 на фиг. 5.
Затем приводы 9 опускают подвижную раму 2 ниже уровня неподвижной рамы 1, устанавливая на нее груз 18 (т. 3 на фиг. 5).
При дальнейшем перемещении подвижной рамы 2 вправо упоры 3 упираются в торцы соответствующих реечных кареток 16 и перемещают их.
При этом посредством зубчатых колес 15 и 13, блока шестерен 14 и рейки штока 12 происходит выдвижение (подъем) платформы И с грузом 18 на необходимую высоту, обеспечивающую удобство выполнения технологических операций (фиг. 3), что соответствует т. 4 на фиг. 5.
Причем различная высота подъема груза 18 над уровнем неподвижной рамы 1 на различных технологических позициях конвейера обеспечивается за счет различного шага между упорами 3.
Упор 3, размещенный ближе к торцу соответствующей реечной каретки 16, обеспечит подъем соответствующей выдвижной
платформы 11 с грузом 18 на большую высоту, и наоборот.
После определенного промежутка времени, необходимого для выполнения технологической операции, включается реверс электродвигателя 4 и подвижная рама 2 перемещается влево.
При этом выдвижные платформы 11 вместе с грузом 18 под действием своего веса опускаются вниз, перемещая зубчатые каретки 16 влево до тех пор, пока груз 18 не будет установлен на неподвижную раму 1, а выдвижная платформа 11 не опустится в крайнее нижнее положение (т. 5 на фиг. 5).
При дальнейшем перемещении подвижной рамы 2 влево упоры 3 выходят из зацепления с соответствующими реечными каретками 16 и при встрече с соседними каретками поворачиваются и свободно проскальзывают по их поверхности.
После перемещения подвижной рамы 2 в крайнее левое (исходное) положение электродвигатель 4 отключается, а упоры 3 остаются в положении, показанном на фиг. 1. Далее цикл повторяется. Конструкция данного конвейера позволяет расширить его технологические возможности и обеспечить удобство обслуживания (сборки) транспортируемого груза и, следовательно, повысить производительность труда.
Формула изобретения
Шагающий конвейер, содержащий неподвижную раму и подвижную раму с приводами ее подъема и перемещения, отличающийся тем, что, с целью расширения технологических возможностей конвейера,
неподвижная рама снабжена расположенными на ней реечными каретками, закрепленными на каждой технологической позиции неподвижными вертикальными направляющими и установленными в них выдвижными платформами, каждая из которых имеет шток с зубчатой рейкой, причем неподвижные вертикальные направляюшие снабжены блоком шестерен, одна из которых установлена с возможностью взаимодействия с зубчатой рейкой штока платформы, а другая - с реечной кареткой, при этом подвижная рама снабжена шарнирно закрепленными на ней упорами, каждый из которых установлен с возможностью взаимодействия с реечной кареткой.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 268989, кл. В 65G 25/00, 1969.
2. Вейсман В. Ф. Шагающие конвейеры. М., «Машиностроение, 1976, с. 4, р. 1 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Шагающий конвейер | 1980 |
|
SU935398A1 |
| ШАГАЮЩИЙ КОНВЕЙЕР С ВЕРТИКАЛЬНОЙ ПОДАЧЕЙ ГРУЗОВ | 1992 |
|
RU2028975C1 |
| Шагающий конвейер | 1980 |
|
SU905165A1 |
| ШАГАЮЩИЙ КОНВЕЙЕР | 1969 |
|
SU239852A1 |
| Устройство для перегрузки штучных грузов | 1979 |
|
SU874501A1 |
| Кран-штабелер | 1987 |
|
SU1504177A1 |
| Мостовой агрегат для сельскохозяйственных работ | 1990 |
|
SU1780605A1 |
| Перегрузочное устройство | 1987 |
|
SU1602833A1 |
| Установка для упаковки рулонов на поддоне | 1979 |
|
SU861174A1 |
| Шагающий конвейер БНЧ-2 | 1982 |
|
SU1090638A1 |
А -
II
Фаг.З
/ ,J
Фуг.
