(54) УСТРОЙСТВО ДЛЯ ПОВОРОТА ИСПОЛНИТЕЛЬНОГО ЗВЕНА ПРОМЫШЛЕННОГО РОБОТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Робот | 1988 |
|
SU1538994A1 |
| Устройство для подачи деталей | 1988 |
|
SU1569180A1 |
| Привод исполнительного звена | 1979 |
|
SU883579A1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ЗАГОТОВОК | 1994 |
|
RU2105653C1 |
| Устройство для подачи заготовок | 1982 |
|
SU1047659A2 |
| Промышленный робот | 1974 |
|
SU503712A1 |
| Механизм качания механической руки | 1986 |
|
SU1400880A1 |
| СЕЛЕКЦИОННЫЙ КОМБАЙН С УСТРОЙСТВОМ ДЛЯ УЧЕТА СОБРАННОЙ МАССЫ | 1992 |
|
RU2045149C1 |
| Устройство для позиционирования руки промышленного робота | 1980 |
|
SU906687A1 |
| Швейный полуавтомат для шитья по контуру | 1989 |
|
SU1730280A1 |
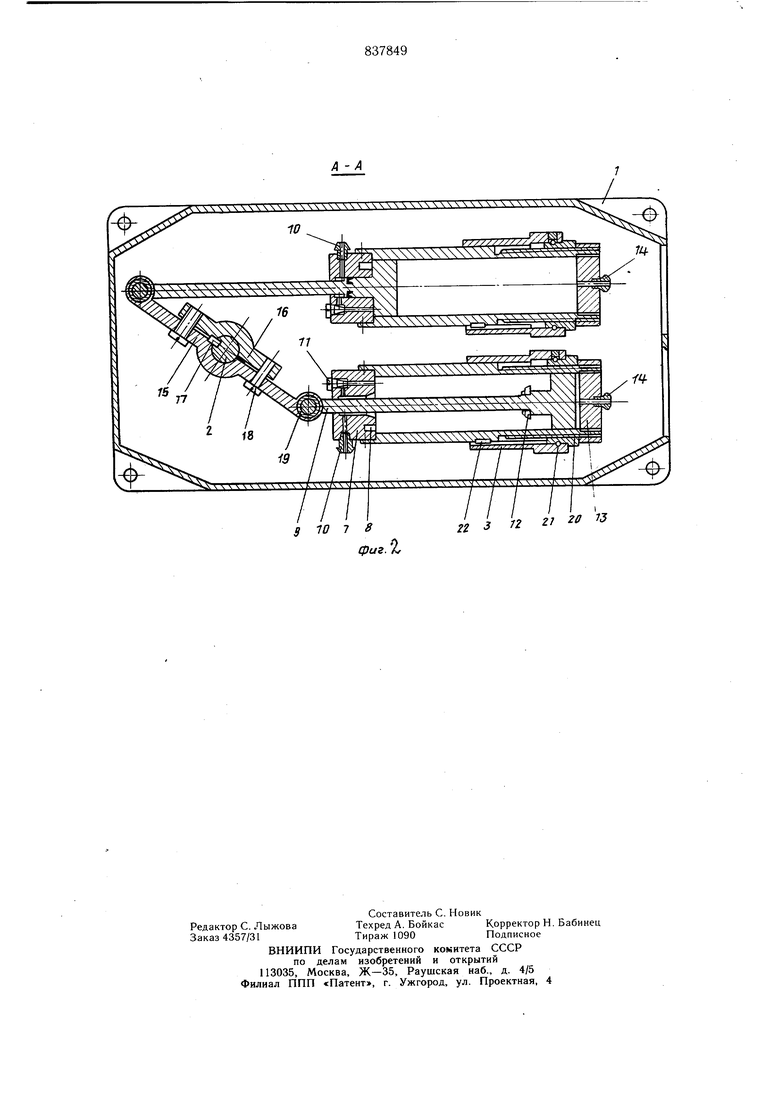
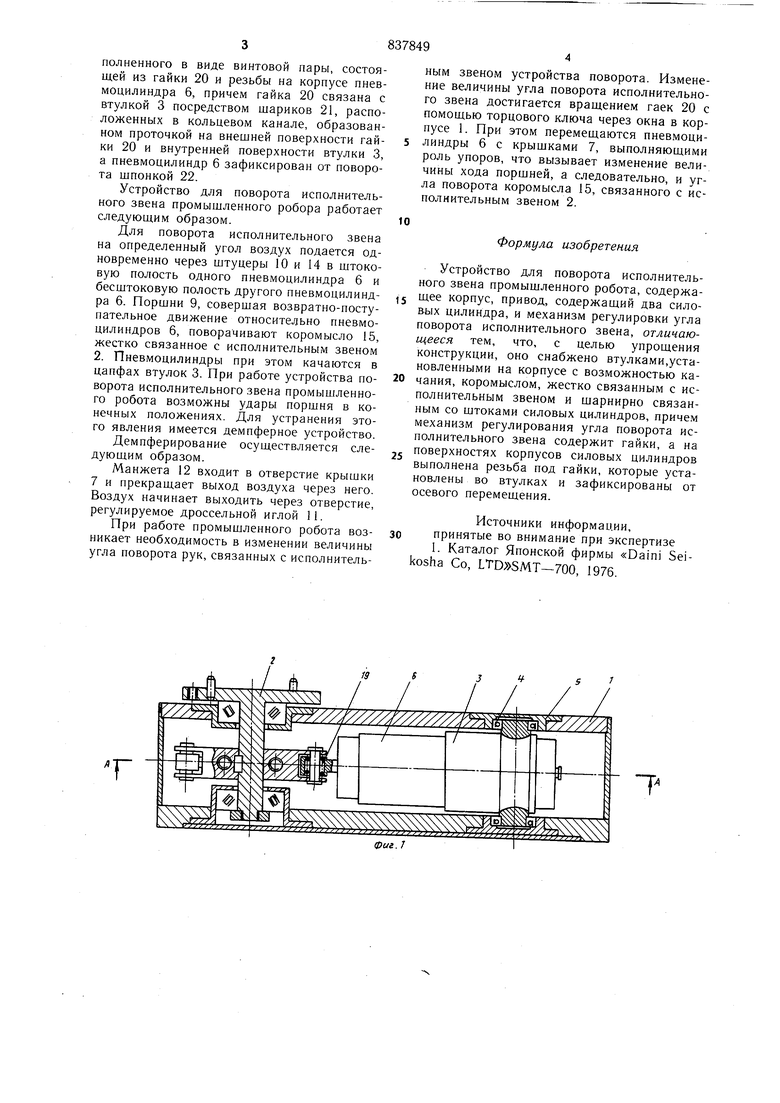
Изобретение относится к машиностроению, в частности к промышленным роботам, и предназначено для поворота рук промышленного робота. Известно устройство для поворота исполнительного звена промышленного робота, содержашее корпус, привод, содержаш.ий два силовых цилиндра, и механизм регулировки угла поврота исполнительного звена 1. Недостатком данного устрства является сложность конструкции. Цель изобретения - упрош,ение конструкции. Цель достигается тем, что устройство снабжено втулками, установленными на корпусе с возможностью качания, коромыслом, жестко связанным с исполнительным звеном и шарнирно связанным со штоками силовых цилиндров, причем механизм регулирования угла поворота исполнительного звена содержит гайки, а на поверхностях корпусов силовых цилиндров выполнена резьба под гайки, которые установлены во втулках и зафиксированы от осевого перемещения. На фиг. 1 изображено устройство поворота исполнительного звена промышленного робота, разрез; на фиг. 2 - сечение А-А на фиг. 1. Устройство для поворота исполнительного звена промышленного робота состоит из корпуса 1 с расположенными в нем исполнительным звеном 2; механизма качания, включающего втулку 3, подшипники 4 и крышки 5; привода исполнительного звена, состоящего из двух пневмоцилиндров 6 двухстороннего действия, расположенных во втулках 3, в крышках 7 которых расположены датчики 8, фиксирующие конечное положение поршней 9, штуцеры 10 для подвода воздуха в штоковую полость пневмоцилиндров б и демпферное устройство, включающее дросселирующую иглу 11, отверстие в крышке 7 для захода манжеты 12, расположенной на поршне, а в крыщках 13 расположены штуцеры 14 для подвода воздуха в бесштоковую полость пневмоцилиндра 6; механизма передачи движения, состоящего из коромысла 15, жестко связанного с валом исполнительного звена 2 посредством скобы 16, шпонки 17 и стягивающих винтов 18 и шарнирно связанного со штоками порщней 9 через игольчатый подщипник 19; механизма регулировки угла поворота, выполненного в виде винтовой пары, состоящей из гайки 20 и резьбы на корпусе пневмоцилиндра б, причем гайка 20 связана с втулкой 3 посредством шариков 21, расположенных в кольцевом канале, образованном проточкой на внешней поверхности гайки 20 и внутренней поверхности втулки 3, а пневмоцилиндр б зафиксирован от поворота шпонкой 22.
Устройство для поворота исполнительного звена промышленного робора работает следующим образом.
Для поворота исполнительного звена на определенный угол воздух подается одновременно через штуцеры 10 и 14 в штоковую полость одного пневмоцилиндра б и бесштоковую полость другого пневмоцилиндра б. Поршни 9, совершая возвратно-поступательное движение относительно пневмоцилиндров б, поворачивают коромысло 15, жестко связанное с исполнительным звеном 2. Пневмоцилиндры при этом качаются в цанфах втулок 3. При работе устройства поворота исполнительного звена промышленного робота возможны удары поршня в конечных положениях. Для устранения этого явления имеется демпферное устройство.
Демпферирование осуществляется следующим образом.
Манжета 12 входит в отверстие крышки 7 и прекращает выход воздуха через него. Воздух начинает выходить через отверстие, регулируемое дроссельной иглой 11.
При работе промышленного робота возникает необходимость в изменении величины угла поворота рук, связанных с исполнитель //////////y / y //J9m
Г
$$$$$$ $ $$ $$$$$$,
ным звеном устройства поворота. Изменение величины угла поворота исполнительного звена достигается вращением гаек 20 с помощью торцового ключа через окна в корпусе 1. При этом перемещаются пневмоцилиндры б с крышками 7, выполняющими роль упоров, что вызывает изменение величины хода порщней, а следовательно, и угла поворота коромысла 15, связанного с исполнительным звеном 2.
10
Формула изобретения
Устройство для поворота исполнительного звена промышленного робота, содержащее корпус, привод, содержащий два силовых цилиндра, и механизм регулировки угла поворота исполнительного звена, отличающееся тем, что, с целью упрощения конструкции, оно снабжено втулками,установленными на корпусе с возможностью качания, коромыслом, жестко связанным с исполнительным звеном и щарнирно связанным со штоками силовых цилиндров, причем механизм регулирования угла поворота исполнительного звена содержит гайки, а на поверхностях корпусов силовых цилиндров выполнена резьба под гайки, которые установлены во втулках и зафиксированы от осевого перемещения.
Источники информации, принятые во внимание при экспертизе 1. Каталог Японской фирмы «Daini Seikosha Со, LTD SMT-700, 1976.
Т
фиг. 1 3 П 2/ 20 15
