S
(Л
ство линейного перемещения, выполнен нее в виде передачи винт - гайка. Винт 5 этой передачи установлен в полость 6 стакана (шток-поршня) 7, а :гайка 8 жестко с ним связана. Винт 5 |взаимосвязан муфтой 9 с электродвига телем 4. Стакан 7 установлен в полость 10, выполненную в корпусе 3, и соединен с основанием посредством шарнира. Полость 0 герметизирована манжетами 13 и 14, размещенными на
00880
стакане 7, и взаимосвязана посредством щтуцера 15 с источником энергоносителя. После поворота исполнительного звена 1 механической руки относительно основания -11 через штуцер 15 в полость 10 подается энергоноситель, давление которого на стакан 7 производит разгрузку передачи винт-гайка от веса исполнительного звена 1 механической руки и расположенного на нем навесного оборудования. 3 ил.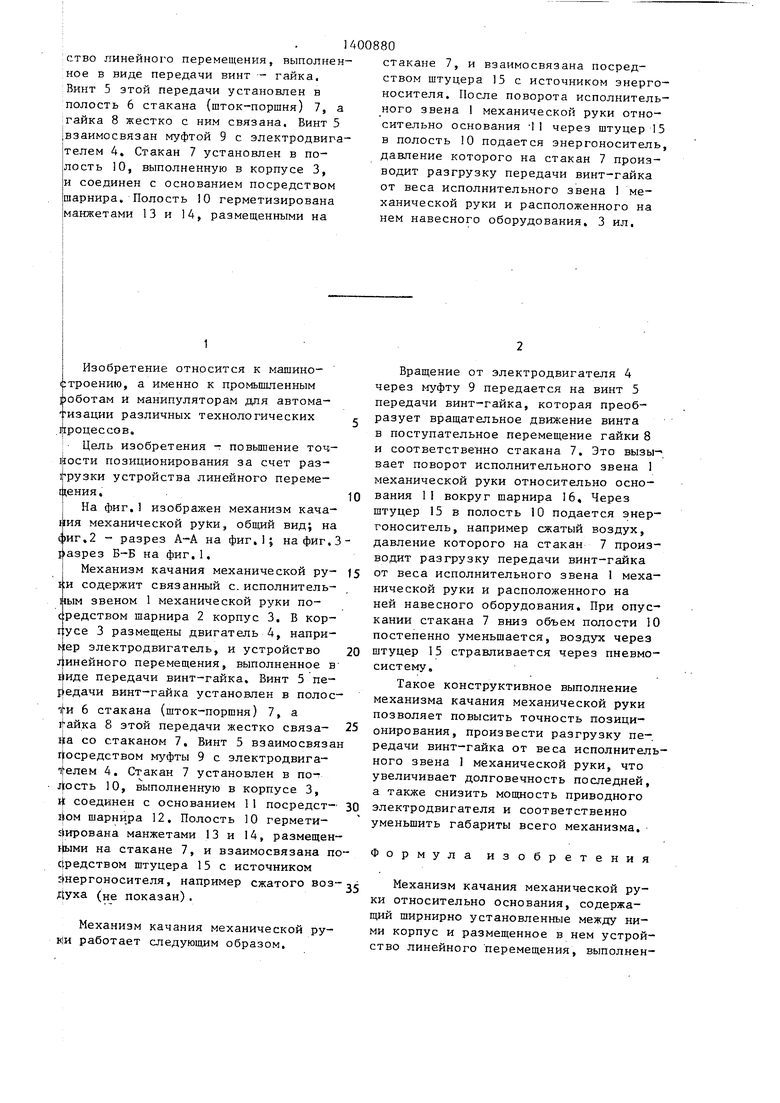
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДЪЕМНИК ДЛЯ ПОГРУЖЕНИЯ ИНВАЛИДА В БАССЕЙН | 1993 |
|
RU2063376C1 |
| Механизм качания механической руки | 1975 |
|
SU522052A1 |
| Исполнительный орган манипулятора | 1989 |
|
SU1722813A1 |
| Привод механической руки | 1977 |
|
SU629061A1 |
| АППАРАТ ДЛЯ ЗАХВАТА И УДЕРЖИВАНИЯ ДИАГНОСТИЧЕСКИХ КАССЕТ | 2012 |
|
RU2628659C2 |
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
| Манипулятор | 1986 |
|
SU1357220A1 |
| ОБРАБАТЫВАЮЩИЙ ЦЕНТР С ГИБРИДНОЙ КИНЕМАТИКОЙ | 2013 |
|
RU2572112C2 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Манипулятор модульного типа | 1983 |
|
SU1263521A1 |

Изобретение относится к машиностроению, а именно к промышленным роботам и манипуляторам для автоматизации различных технологических процессов. Целью изобретения является повьшение точности позиционирования за счет разгрузки устройства линейного перемещения. Для этбго в корпусе 3 размещены электродвигатель 4 и устрой
1
Изобретение относится к машиностроению, а именно к промьшшенным
оботам и манипуляторам для автома- изации различных технологических процессов.
Цель изобретения - повышение точ- ости позиционирования за счет раз- 1 рузки устройства линейного переме- цения.
На фиг.1 изображен механизм качания механической руки, общий вид; на (3)иг.2 - разрез А-А на фиг. 1; на фиг, разрез Б-Б на фиг.1.
Механизм качания механической ру- 1:и содержит связанный с. исполнительным звеном 1 механической руки по- с:редством шарнира 2 корпус 3. В кор- г:усе 3 размещены двигатель 4, напри:ер электродвигатель, и устройство
инейного перемещения, выполненное в ниде передачи винт-гайка. Винт 5 пе- 1:|едачи винт-гайка установлен в полос-
и 6 стакана (шток-поршня) 7, а 8 этой передачи жестко связа- 4а со стаканом 7. Винт 5 взаимосвязан г осредством муфты 9 с электродвига- 4, Стакан 7 установлен в по-г 10, выполненную в корпусе 3, 1 соединен с основанием 1 1 посредст- lioM шарнира 12. Полость 10 гермети- г|ирована манжетами 13 и 14, размещен- |ыми на стакане 7, и взаимосвязана по Средством штуцера 15 с источником ; нepгoнocитeля, например сжатого возДуха (не показан).
Механизм качания механической ру- К1И работает следующим образом.
0
5
0
5 0 эг
Вращение от электродвигателя 4 через муфту 9 передается на винт 5 передачи винт-гайка, которая преобразует вращательное движение винта в поступательное перемещение гайки 8 и соответственно стакана 7. Это вызы- вает поворот исполнительного звена 1 механической руки относительно основания II вокруг шарнира 16, Через штуцер 15 в полость 10 подается энергоноситель, например сжатый воздух, давление которого на стакан 7 производит разгрузку передачи винт-гайка от веса исполнительного звена 1 механической руки и расположенного на ней навесного оборудования. При опускании стакана 7 вниз объем полости 10 постепенно уменьшается, воздух через штуцер 15 стравливается через пневмо- систему.
Такое конструктивное выполнение механизма качания механической руки позволяет повысить точность позиционирования, произвести разгрузку передачи винт-гайка от веса исполнительного звена 1 механической руки, что увеличивает долговечность последней, а также снизить мощность приводного электродвигателя и соответственно уменьшить габариты всего механизма.
Формула изобретения
Механизм качания механической руки относительно основания, содержащий ширнирно установленные между ними корпус и размещенное в нем устройство линейного перемещения, выполненVu2. 2 б-б
л-л
иг.Ъ
