(54) ЗАГРУЗОЧНОЕ УСТРОЙСТВО
| название | год | авторы | номер документа |
|---|---|---|---|
| Многопозиционный станок | 1980 |
|
SU891341A1 |
| Манипулятор | 1991 |
|
SU1813620A1 |
| Резьбонакатной полуавтомат | 1988 |
|
SU1625568A1 |
| Манипулятор | 1985 |
|
SU1331638A1 |
| Автоматизированный агрегат для горячей штамповки | 1978 |
|
SU904860A1 |
| МНОГОПОЗИЦИОННЫЙ СТАНОКI ВСЕСОЮЗНАЯ \ | 1973 |
|
SU381499A1 |
| ТРУБОРЕЗНЫЙ АВТОМАТ | 1993 |
|
RU2085343C1 |
| Устройство для удаления внутренностей у рыбы | 1976 |
|
SU591169A1 |
| Автоматическая линия для обработки концов длинномерных деталей | 1985 |
|
SU1337236A1 |
| Манипулятор | 1982 |
|
SU1138221A1 |


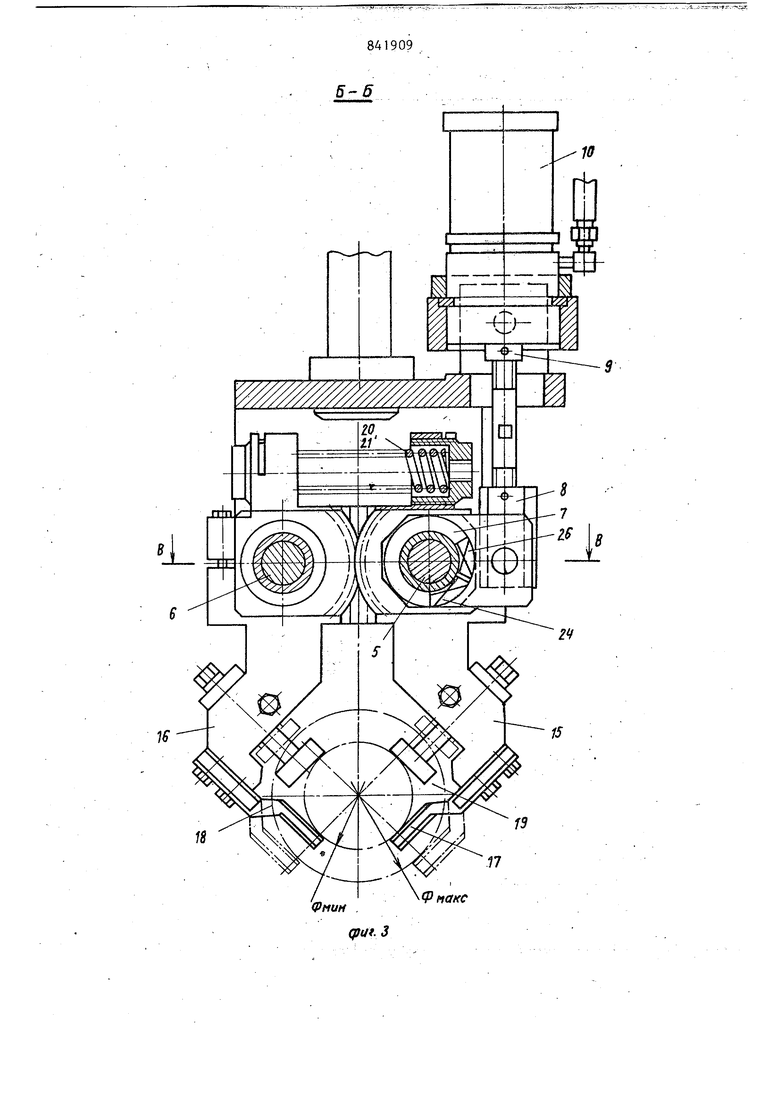

Изобретение относится к станкостроению, в частности к загрузочным устройствам, например, металлорежущик станков, в особенности станков, предназначенных для .обработки ступенчатых деталей типа валов. Известно загрузочное устройство для захвата деталей типа валов, содержащее подъемно-поворотную руку, несущую панель с двумя и более парами подпружиненных и кинематически попарно связанных между собой захватов, расположенных на двух скалках, на одной из которых установлена поворотная вилка с серьгой П J. Недостатком известного устройства является необходимость точной регулировки размера захватываемой детали, а также низкая универсальность. Цель изобретения - расширение технологических возможностей и увеличение производительности за счет повыше ния надежности захвата деталей и обес печения возможности зажима ступенчатых деталей различной конфигурации. Поставленная цель достигается тем, что устройство снабжено попарно связанными между собой кулачковыми втулками, на которых закреплены захваты, причем втулки установлены с возможностью поворота на неподвижных скалках, а на вилках выполнены кулачки, соответствующие кулачкам на втулках и образующие с ними кулачковые муфты. В предлагаемом устройстве количество пар захватов определяется длиной детали. На фиг. 1 представлено загрузочное устройство, общий вид; на фиг.. 2 то ,же, вид. А на фиг. 1; на фиг. 3 разрез Б-В на фиг. 1; на фиг,. 4 разрез В-В на фиг. 3. Устройство состоит из портала 1 с перемещающейся по нему в продольном направлении кареткой 2 и установленной на ней подъемно-поворотной рукой 3, несущей панель 4 с двумя параллельными скалками 5 и 6, на одной изкоторых, например на скалке 5, устайовлена поворотная вилка 7 с серьгой 8, соединенная со штоком 9 силового цилиндра 10. На скалках 5 и 6 установлены с возможностью поворота кинематически связанные попарно между собой, например, посредством зубчатого зацепления втулки I .и 12, 13 И 14, на которых закреплены захваты 15 и 16, 17 и 18, зажимающие ступенчатую деталь 19 по ступеням d попарно подпружиненные между собой пружинами сжатия 20 и 21 (по одной на каждую пару захватов) .На поворотной вилке 7, например, на ее торцах 22 и 23, выполнены кулачки 24 и 25, взаимодействующие (при повороте вилки 7 (при раскрытии , захватов} с соответствзпощими кулачками 26 и 27 втулок 11 и 13, установленных на той же скалке 5. Устройство работает следующим образ ом . , При зажиме детали 19 захваты закрываются под действием пружин 20 и 21 (фиг. 3) . Пара захватов, например, 17 и 18, соприкоснувшись с обрабатываемой деталью 19 (фиг. 1 и З), например с поверхностью ступени большего Диаметра, останавливается, а другая пара захватов 15 и 16 продолжает закрываться под действием пружины 20 до Соприкосновения с поверхностью ступени меньшего диаметра детали 19. При этом отклонение от номинального размера диаметра ступени меньшего диаметра захватываемой детали 19, на который настроены захваты, компенсируется свободным ходом втулок (в Данном случае 11 и 12, поворачивающихся под действием пружины 20 на захваты 15 и 16, закрепленные на этих втулках. Аналогичным образом работают и другие пары захватов, если они зажимают деталь по поверхности ступени больЩего диаметра. - . Таким образом, каждая из пар захватов 15 и 16, 17 и 18 закрьшается независимо друг от друга под действием пруяшн 20 и 21, чем обеспечивается надежное зажатие детали 19 по Ступеням. При раскрытии захватов шток 9 силового цилиндра 10 воздействует на серь гу 8, поворачивая тем самым поворотную вилку 7, на торцах 22 и 23 Сфиг.З и которой вьтолнены кулачки. 24 и 25, взаимодействующие с кулачками 26 и 27, расположенными на втулках II и 13 соответственно. При повороте вилки 7 сначала взаимодействуют кулачки 24, выполненные на торце 22 поворотной вилки 7, с кулачками 26, выполненными на втулке 1 1, на которой закреплен захват 15 из пары захватов 15 и 16, зажимающих деталь 19 по поверхности ступени меньшего диаметра. При этом от поверхности детали 19 отводится захват I5 (и кинематически связанный с ним захват 16 . Поворотная вилка 7, продолжая вращаться, своими кулачками 25, вьщолненными на торце 23, воздействует на кулачки 27 втулки 13, на которой закреплен захват 17 из пары захватов 17 и 18, тем самым осуществляя раскрытие и этой пары захватов. Захваты 15 и 16, 17 и 18 при переНаладке загрузочного устройства могут быть передвинуты в осевом направлении на втулках 11 и 12, 13 и 14, если этого требует конфигурация детали 19. Формула изобретения Загрузочное устройство для захвата деталей типа валов, содержащее подьемно-поворотную руку, несущую панель с двумя и более парами подпружиненных и кинематически попарно связанных между собой захватов, расположенных на двух скалках, на одной из которых установлена поворотная вилка с серьгой, отличающееся тем, что, с целью расширения технологических возможностей и повышения производительности, оно снабжено попарно связанными между собой кулачковыми втулками, на которых закреплены захваты, причем втулки установлены с возможностью поворота на неподвижных скалках, а на вилках вьшолнены кулачки, соответствующие кулачкам на втулках и образующие с ними кулачковые муфты. Источники информации, принятые во внимание при экспертизе . 1. Портальный манипулятор Пирйн, тип. Б-510702. Каталог Болгарии. София, 1976.
8идА
/
cput.l
(PflUH
19
17
fPnOKC
(put. 3
