(5) ЗАХВАТ МАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват манипулятора | 1979 |
|
SU844262A1 |
| Клещевая головка хобота ковочного манипулятора | 1983 |
|
SU1133013A1 |
| Дисковый станок для резки круглых заготовок | 1970 |
|
SU410608A1 |
| Копирующее устройство для автоматического вождения сельскохозяйственной машины по борозде | 1981 |
|
SU959649A1 |
| ГИДРОЦИЛИНДР ДВОЙНОГО ДЕЙСТВИЯ | 1991 |
|
RU2022732C1 |
| Гидравлический синхронный механизм зажима | 1985 |
|
SU1284769A1 |
| Зажимное устройство контактной стыкосварочной машины | 1987 |
|
SU1447602A1 |
| МАШИНА ДЛЯ КОНТАКТНОЙ СТЫКОВОЙ СВАРКИ РЕЛЬСОВ | 1998 |
|
RU2186664C2 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Модуль для автоматизированной листовой штамповки | 1989 |
|
SU1708477A1 |
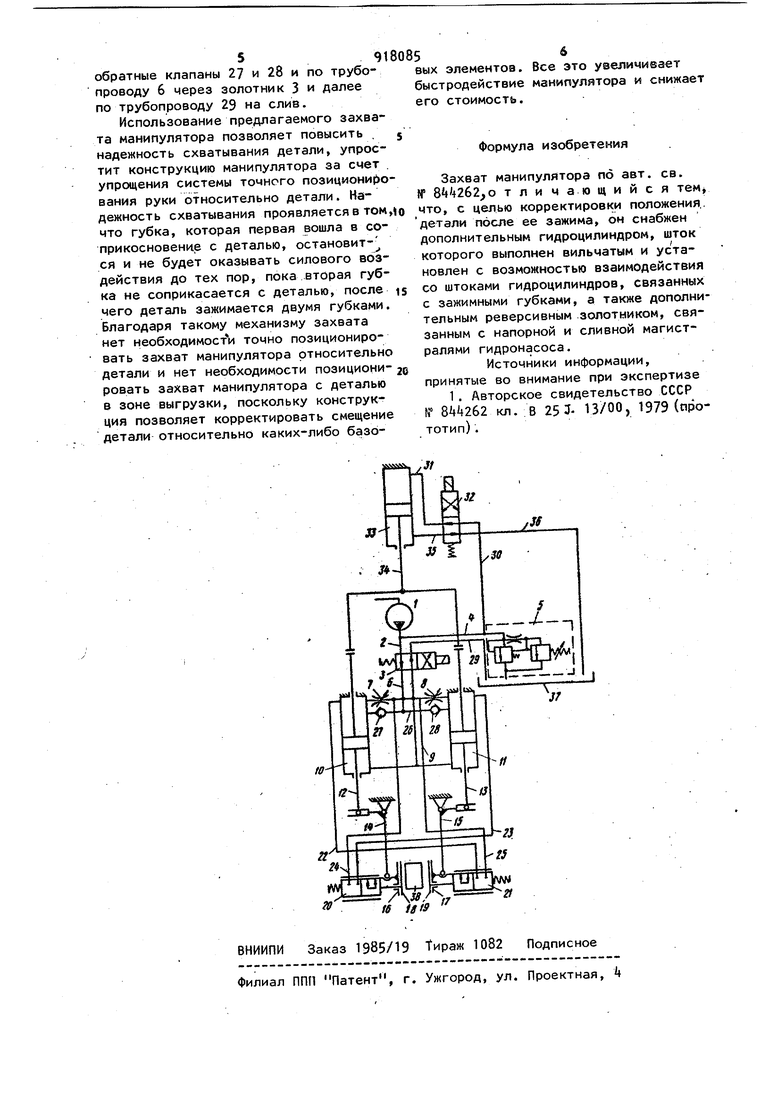
:-1 Изобретение относится к машиностроению и может быть использовано при создании промышленных роботов и манипуляторов. . .По основному авт. св. № Bkk26Z известен захват манипулятора, содержащий питаемые от гидронасоса гидроцилиндры, связанные с зажимными губками, систему напорных и сливных магистралей и снабженный реверсивным зо лотником и следящими золотниками,плу жеры которых выполнены с щупами, при чем зажимные губки жестко соединены .со следящими золотниками, соединенными системой рычагов с гидроцилиндр ми, сообщенными с гидронасосом через реверсивный золотник til. Известный захват не позволяет производить корректировку положения детали после ее зажима, что требует применения дополнительных устройств позиционирования. Целью изобретения является корректи ровка положения детали после ее зажима. Для достижения поставленной цели захват манипулятора снабжен дополнительным гидроцилиндром, шток которого выполнен вильчатым и установлен с возможностью взаимодействия со штоками гидроцилиндров, связанных с зажимными губками, а также дополнительным реверсивным золотником, связанным с напорной и сливной магистралями гидронасоса. На чертеже данапринципиальная гидросхема предлагаемого захвата манипулятора. Захват состоит из гидронасоса 1, соединенного трубопроводом 2 с реверсивным золотником 3 и трубопроводом с переливным клапаном 5 дифферен- циального типа. Реверсивный золотник 3 соединен трубопроводом 6 через дрос сели 7 и 8 трубопроводом 3 с гидроцилиндрами 10 и 11. Штоки 12 и 13 гидроцилиндров 10 и 11 через рычаги 1 и 15 соединены с самоустанавливающимися губками 16 и 17 зажимных элементов, перед которыми расположены щупы 18 и 19, закрепленные на плунжерах следящих золотников 20 и 21. Гидроцилиндры 10 и 11 соединены тру-бопроводами 22 и 23 со следящими золотниками 20 и 21, которые трубопроводами 2 и 25 соединены с трубопроводом 6. Гидроцилиндры 10 и 11 соединены дополнительно трубопроводом 26 и обратными клапанами 27 и 28 с трубопроводом 6. Гидросистема зажима детали снабжена.трубопроводом 29 слива. Гидронасос 1 трубопроводами ,30 и 31 через дополнителный реверсивный золотник 32 соединен с дополнительным гидроцилиндром 33 коректировки, шток З которого выполнен вильчатым и расположен с возможностью воздействия на штоки поршней гидроцилиндра 10 и 11. Трубопроводами 35 и 36 дополнительный гидроцилиндр 33 корректировки через дополнительный реверсивный золотник 32 соединен со сливной емкостью 37. Захват работает следующим образом. От гидронасоса 1 жидкость поступает по трубопроводу 2 во включенный реверсивный золотник 3, далее по трубрпроводу 6 к дросселям 7 и 8 и затем в гидроцилиндры 10 и 11, приводя в движение поршни со штоками 12 и 13. Штоки 12 и 13 через рычаги Н и 15 сближают зажимные губки 16 и 17 и щупы 18 и 19. Деталь 38 зажимается независимо от ее расположения относительно зажимных губок 16 и 17. Например, при соприкосновении щупа 18 с зажимной деталью 38 он утапливается и перемещает плунжер следящего золотника 20 влево, жидкость с трубопровода 6 начинает поступать по трубопроводу 2k через золотник 20, далее по трубопроводу 23 в гидроцилиндр 11, который сообщает до.. полнительное движение штоку 13. а след овательно зажимной губке 1 7 через рычаг 15. При соприкосновении щупа 19 плунжер золотника 21 смещается вправо, и жидкость с трубопровода 6 через трубопровод 25, золотник 21 и трубопровод 22 поступает в гидроцилиндр 10. В этом случае зажимные губки 16 и 17 одновременно производят зажим детали 38. Жидкость находящаяся в гидроцилиндрах 10 и 11 при поступательном движении штоков, поступает по трубопроводу 9 через золотник 3 к трубопроводу 29 на слив. При зажиме детали 38 гидронасос 1 производит подачу жидкости через переливной.клапан 5 дифференциального типа на СЛЙ1В. При необходимости установить 91 5 симметрично зажимные элементы 16 и 17 с деталью 38 относительно базовых деталей (к примеру осей качения рычагов lA и 15) включается дополнительный золотник 32, и жидкость от гидронасоса 1 поступает по трубопроводам и 30 через дополнительный реверсивный золотник 32 в дополнительный гидроцилиндр 33 корректировки и приводит в движение вильчатый шток 3. Жидкость из дополнительного гидроцилиндра 33 корректировки идет на слив по трубопроводам 35 и 36. В случае несимметричного зажатия детали 38 относительно базовых элементов штоки 12 и 13 будут иметь разную величину хода. Тогда вильчатый шток 3 дополнительного гидроцилиндра 33 корректировки соприкасается, к примеру, своим левым упором со штоком 12 гидроцилиндра 10, имевшего меньший ход, и продвигает его дальше, преодолев сопротивление давления в гидроцилиндре 11, через рычаг 14, деталь 38, рйчаг 15 и шток 13. Усилие, приложенное к штоку 12, в данном случае больше усилия, приложенного к штоку 13, поскольку шток по- . лучает дополнительное усилие от штока дополнительного гидроцилиндра 33 корректировки. Вытесняемая, жидкость в гидроцилиндре 10 будет поступать по трубопроводу 9 в гидроцилиндр 11, а вытесняемая жидкость в гидроцилиндре 11 будет поступать через обратный клапан 28 по трубопроводу 26 в гид- роцилиндр 10. Шток 12 будет перемещаться вперёд, а шток 13 назад до соприкосновения с правым упором вильчатого штока 3. В этом случае детал1э 38 установится симметрично. Затем отключается дополнительный реверсивный золотник 32, и возвращаетяс в исходное положение шток 3 дополнительного гидроцилиндра 33 корректировки. При необходимости разжима детали . 38 отключается реверсивный золотник 3, жидкость от гидронасоса 1 по трубопроводу 2 поступает в трубопровод 9 и далее к гидроцилиндрам 10 и 11, поршни которых смещаются и приводят в движение в обратном направлении штоки 12 и 13, а следовательно, и рычаги 15 и 14, производя отвод губок 1б и 17 от детали 38. При разжиме детали 38 щупы 18 и 19 под действием пружин следящих золотников 20 и 21 возвращаются в исходное положение. При разжиме жидкость из гидроцилиндров 10 и 11, поступает по трубопроводу 26 через
