1
Изобретение относится к грузозахватным устройствам.
Известно грузозахватное устройство, содержащее корпус, шарнирно закрепленные на нем захватные рычаги и механизм уп- 5 равления ими, содержащий подпружиненные лепестки, взаимодействующие с захватными рычагами 1.
Однако это устройство требует большого хода рычагов и дополнительного его опус- ю кания при захвате груза.
Наиболее близким к описываемому изобретению является захватное устройство для грузов, снабженных цапфами, содержащее корпус, внутри которого установлен 5 полый ползун с шарнирно закрепленными на нем захватными рычагами и механизм управления рычагами 2.
Недостатком этого устройства является низкая надежность его в работе из-за слож- 20 ности конструкции механизма управления и его незащищенности от влияния внешней среды.
Целью изобретения является повышение надежности в работе устройства.25
Поставленная цель достигается тем, что механизм управления содержит установленный в ползуне с возможностью поворота подпружиненный ступенчатый цилиндр, в верхней части которого выполнены односто- 30
ронние скосы и профилированные выемки, в нижней части жестко закреплен кулачок для взаимодействия с захватными рычагами, а на корпусе и ползуне закреплены выступы, взаимодействующие соответственно со скосами и выемками ступенчатого цилиндра.
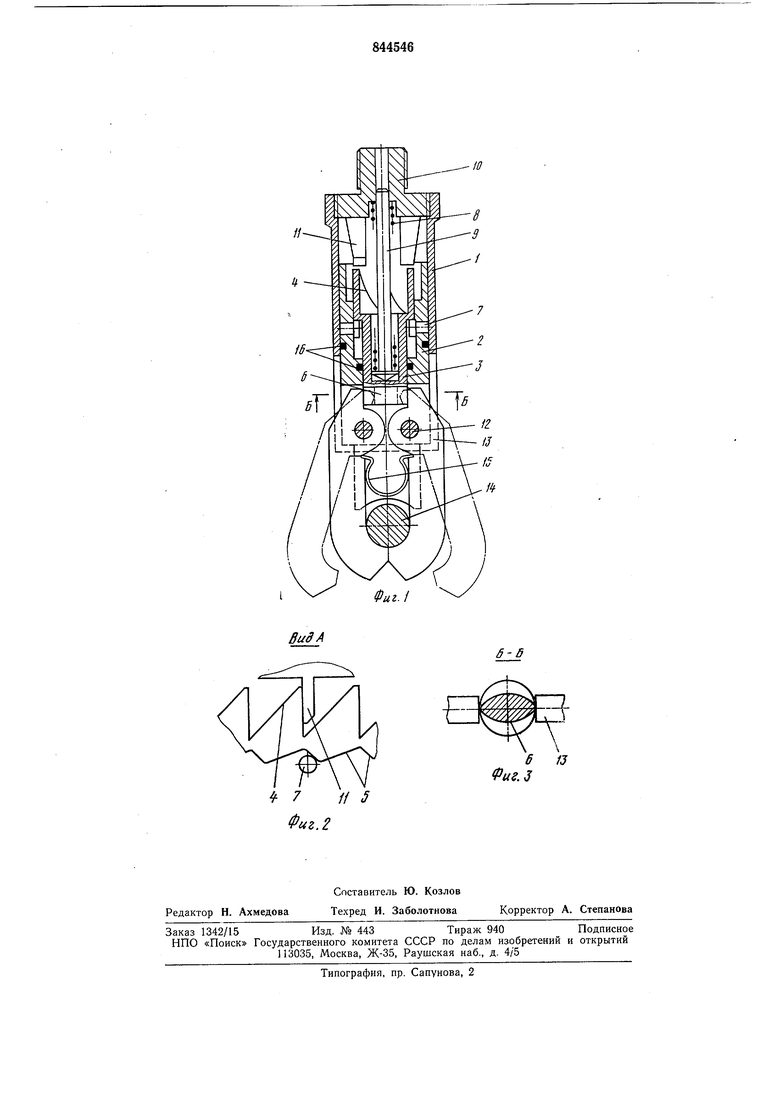
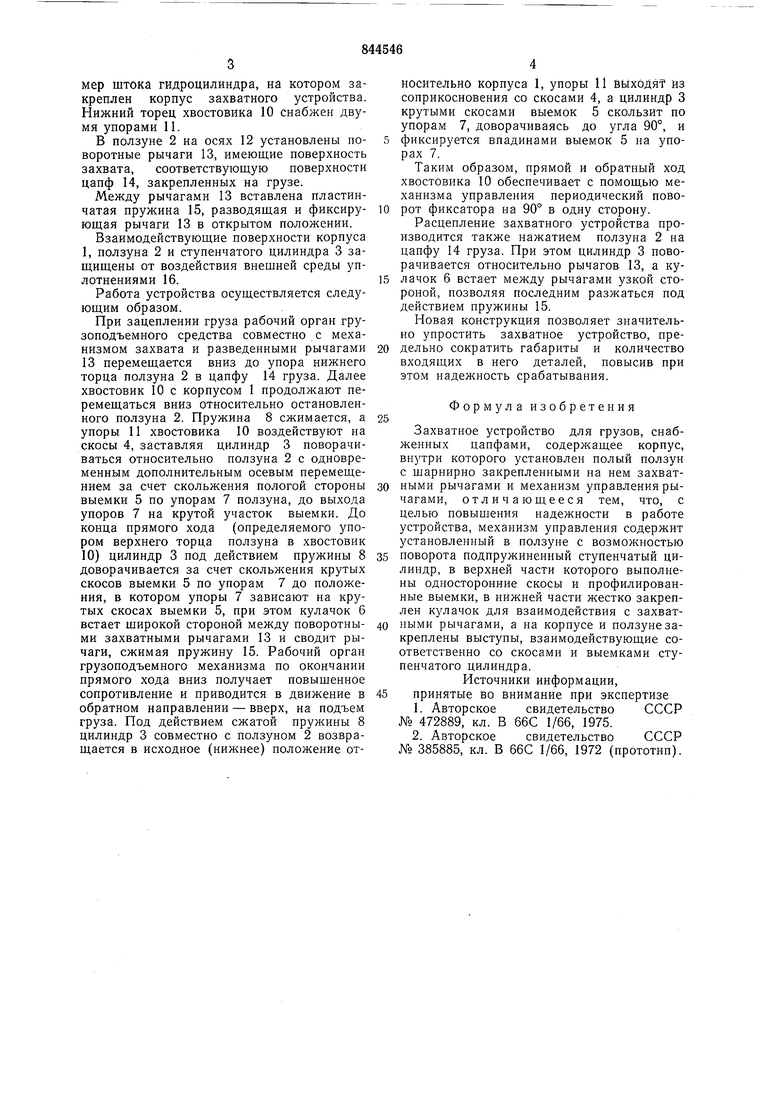
На фиг. 1 показан общий вид захватного устройства в закрытом состоянии (пунктиром- в раскрытом состоянии); на фиг. вид А фиг. 1 (взаимное положение скосов и выемок механизма управления с упорами корпуса и ползуна); на фиг. 3 - сечение Б-Б фиг. 1 (взаимное положение фиксатора и рычагов в сцепленном состоянии).
Захватное устройство состоит из корпуса 1, в полости которого с возможностью осевого перемещения установлен ползун 2. В отверстии ползуна с возможностью осевого и углового перемещения установлен ступенчатый цилиндр 3. В верхней части цилиндра 3 имеются скосы с наклонной рабочей поверхностью 4 и выемки 5, а в нижней части закреплен кулачок 6. Цилиндр 3 выемками 5 поджат к упорам 7 ползуна пружиной 8, размещенной на штоке 9, нижняя часть которого головкой вставлена в глухое отверстие цилиндра 3, а верхняя - в отверстие хвостовика 10 исполнительного органа грузоподъемного механизма, например штока гидроцилиндра, на котором закреплен корпус захватного устройства. Нижний торец хвостовика 10 снабжен двумя упорами 11.
В ползуне 2 на осях 12 установлены поворотные рычаги 13, имеющие поверхность захвата, соответствующую поверхности цапф 14, закрепленных на грузе.
Между рычагами 13 вставлена пластинчатая пружина 15, разводящая и фиксирующая рычаги 13 в открытом положении.
Взаимодействующие поверхности корпуса I, ползуна 2 и ступенчатого цилиндра 3 защищены от воздействия внещней среды уплотнениями 16.
Работа устройства осуществляется следующим образом.
При зацеплении груза рабочий орган грузоподъемного средства совместно с механизмом захвата и разведенными рычагами 13 перемещается вниз до упора нижнего торца ползуна 2 в цапфу 14 груза. Далее хвостовик 10 с корпусом 1 продолжают перемещаться вниз относительно остановленного ползуна 2. Пружина 8 сжимается, а упоры 11 хвостовика 10 воздействуют на скосы 4, заставляя цилиндр 3 поворачиваться относительно ползуна 2 с одновременным дополнительным осевым перемещением за счет скольжения пологой стороны выемки 5 по упорам 7 ползуна, до выхода упоров 7 на крутой участок выемки. До конца прямого хода (определяемого упором верхнего торца ползуна в хвостовик 10) цилиндр 3 под действием пружины 8 доворачивается за счет скольжения крутых скосов выемки 5 по упорам 7 до положения, в котором упоры 7 зависают на крутых скосах выемки 5, при этом кулачок 6 встает щирокой стороной между поворотными захватными рычагами 13 и сводит рычаги, сжимая пружину 15. Рабочий орган грузоподъемного механизма по окончании прямого хода вниз получает повыщенное сопротивление и приводится в движение в обратном направлении - вверх, на подъем груза. Под действием сжатой пружины 8 цилиндр 3 совместно с ползуном 2 возвращается в исходное (нижнее) положение относительно корпуса 1, упоры 11 вЫхоДяТ из соприкосновения со скосами 4, а цилиндр 3 крутыми скосами выемок 5 скользит по упорам 7, доворачиваясь до угла 90°, и фиксируется впадинами выемок 5 на упорах 7.
Таким образом, прямой и обратный ход хвостовика 10 обеспечивает с помощью механизма управления периодический поворот фиксатора на 90° в одну сторону.
Расцепление захватного устройства производится также нажатием ползуна 2 на цапфу 14 груза. При этом цилиндр 3 поворачивается относительно рычагов 13, а кулачок 6 встает между рычагами узкой стороной, позволяя последним разжаться под действием пружины 15.
Новая конструкция позволяет значительно упростить захватное устройство, предельно сократить габариты и количество входящих в него деталей, повысив при этом надежность срабатывания.
Формула изобретения
Захватное устройство для грузов, снабженных цапфами, содержащее корпус, внутри которого установлен полый ползун с шарнирно закрепленными на нем захватными рычагами и механизм управления рычагами, отличающееся тем, что, с целью повыо1ения надежности в работе устройства, механизм управления содержит установленный в ползуне с возможностью
поворота подпружиненный ступенчатый цилиндр, в верхней части которого выполнены односторонние скосы и профилированные выемки, в нижней части жестко закреплен кулачок для взаимодействия с захватными рычагами, а на корпусе и ползуне закреплены выступы, взаимодействующие соответственно со скосами и выемками ступенчатого цилиндра.
Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 472889, кл. В 66С 1/66, 1975.
2.Авторское свидетельство СССР № 385885, кл. В 66С 1/66, 1972 (прототип).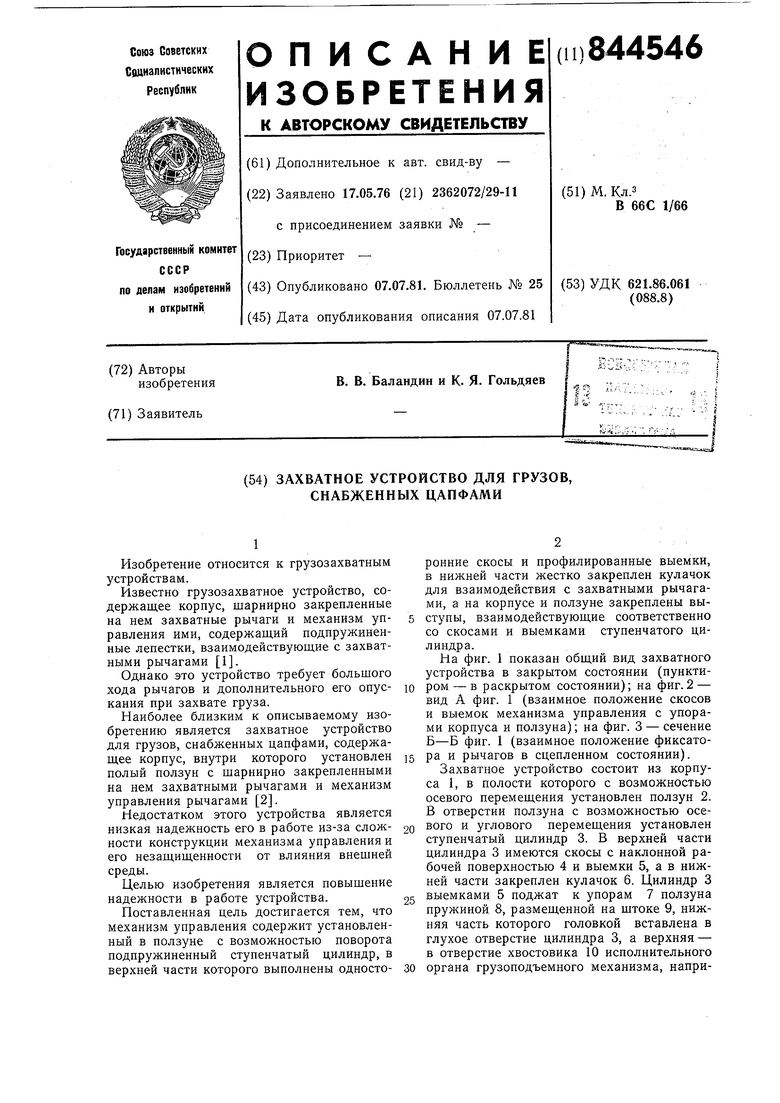
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство для грузов с цапфами | 1983 |
|
SU1245539A1 |
| Грузозахватное устройство | 1983 |
|
SU1105441A1 |
| Захватное устройство для грузов с цапфами | 1985 |
|
SU1316972A1 |
| Грузозахватное устройство | 1988 |
|
SU1652277A1 |
| Грузозахватное устройство | 1982 |
|
SU1079591A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2006 |
|
RU2306253C1 |
| МЕХАНИЗМ ФИКСАЦИИ ГРУЗОЗАХВАТНОГО УСТРОЙСТВА | 1992 |
|
RU2035380C1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Саморасцепляющееся грузозахватное устройство | 1981 |
|
SU992386A1 |