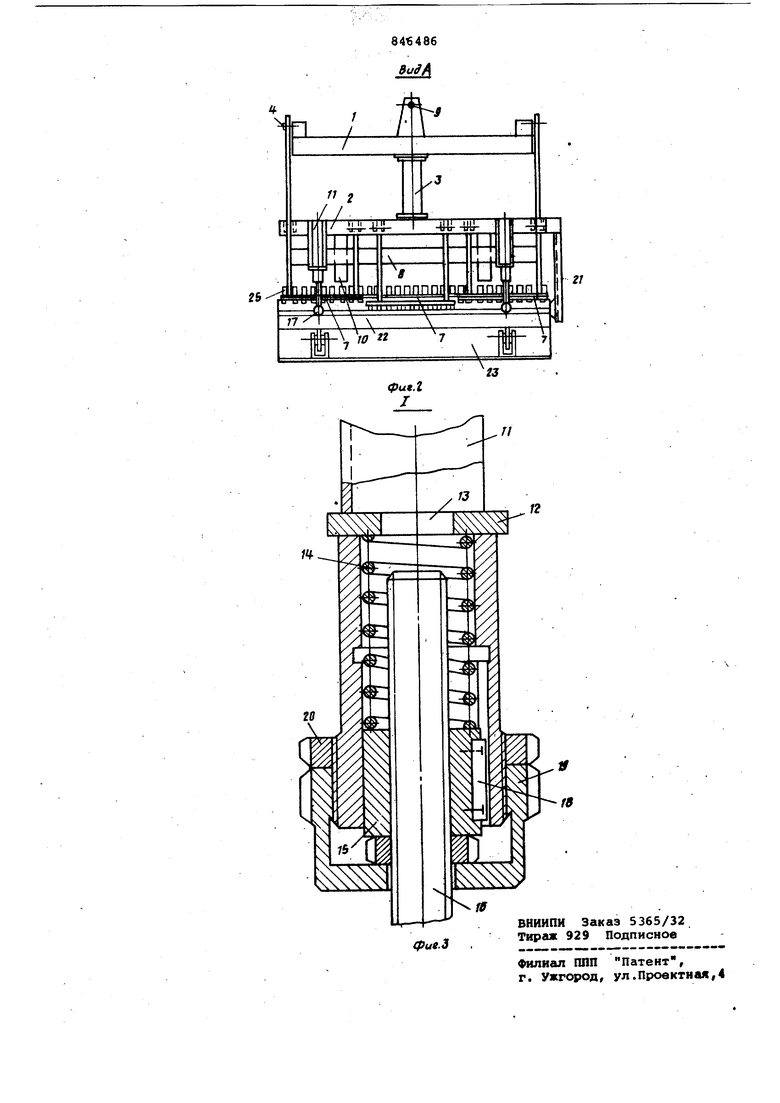
Изобретение относится к подъемнотранспортному оборудованию, а именно к автоматическим захватам. По основному авт .св. 615030 изве тен автоматический захват, преил«уиес твенно для извлечения строительных изделий из форм, содержгиций подвеииваемую к грузоподъемному механизму траверсу и раму, связанные между собой механизмом фиксации, и захватные лапы, шарнирно закрепленные на раме захватные лапы выполнены разновысоки ми как по длине, так и по ширине ра №J U1. Недостатком этого устройства является недостаточно широкие функцио нгшьные возможности. Цель изобретения- расширение функциональных возможностей. Указанн ая. цель достигается тем, что по краям рг№1Ы жестко закреплены стаканы, внутри каждогоиз которых устаиовлен подпружиненный поршень с резьбовым отверстием для штока, имв пего сферическую головку на свободном конце. На фиг. 1 изображен автоматический захват, общий вид; на фиг. 2 вид А на фиг. 1 на фиг. 3 узел I н фиг. 1. Устройство содержит траверсу 1, раму 2, соединенную с траверсой 1 механизмом фиксации 3, тяг 4 и захватов высокого 5 и короткого 6.. Лапы 7соединяют каждую пару захватов по всей длине формы, на которой располагается несколько изделий. Каждая пара разновысоких захватов с лапё1ми 7 чередуются между собой как по длине, так и по ширине захвата. Все захваты соединены между собой балкой 8, что обеспечивает их синхронную работу. Автоматический захват присоединяется к грузоподъемному механизму посредством оси 9. На раме 2 закреплены опорные стойки 10 ц направляющие стойки 11 со стаканалш 12, имеющими отверстие 13. В каждом стакане 12 расположена пружина 14 и поршень 15, в резьбовом отверстии которого установлен шток 16 со сферической головкой 17. Для исключения сгилопроизвольного npoqopaчивания поршня 15 в нем закреплена шпонка 18, перемещающаяся вместе с поршнем 15 вдоль стакана 12. 8нижней части стакана 12 установлены накладная 19 и стопорная 20 гайки. При этом на раме 2 закреплена ограничители 21.
Устройство работает следующим образом.
Автоматический захват опускают и посредством сферических головок 17 точно фиксируют на раскрытых фигурных бортах 22 формы 23 с упорами 24. При этом поршень 15 перемешается вдоль стакана 12 вверх и сжимает пруtRHHV 14 до тех пор, пока опорные стой ки 10 не достигнут поверхности изделия 25. При этом ограничители 21 фиксируют захват в продольном направлении. Рама 2 остается неподвижной, а траверса 1 продолжает опускаться до тех пор, пока механизм фиксации 3 . не запирает раму 2 и траверсу 1, кото рая, опускаясь, дополнительно разводит лапы 7.
При подъеме траверсы 1 лапы.7 сводятся тягами 4 и захватывают изделия эа оголенные концевые участки При этом сначала поднимаются те концы изделий которые захвачены лапами 7 коротких захватов 6. В этот момент происходит отрыв изделий от формы 23. При дальнейшем подъеме траверсы происходит захват противоположных концов изделий лапами 7 высоких захватов 5 и извлечение изделий из Формы. Усилие от груза передается через лапы 7 тягам 4. При этом узел Фиксации 3 отпирает раму 2 и траверсу 1. Когда изделия опускаются на поверхность и автоматический захват опорными стойками 10 упирается в поверхность изделий, а траверса 1 еще опускается, тяги 4 разводят лапы 7 и освобождают
груз. Опускание траверсы 1 продолжа ется до того момёнта, пока механизм фиксации 3 снова не запирает траверс 1 .и раму 2, что не дает возможности тягам 4 свести захваты 5,6. При последующем подъеме автоматического захвата изделия остаются на поверхности и цикл продолжается.
Врацением штока 16 достигается точность регулировки и переналадки автоматического захвата для подъема изделий разной высоты.
Предложенное устройство позволит: повысить производительность труда за точной фиксации лап относительно торцов изделий, за счет быстрой перенсшадки устройства на изделиях разной высоты.
Формула изобретения
Автоматический захват по авт.св. W 615030, отличающийся тем, что, с целью расширения функционгшьных возможностей, по краям рамы жестко закреплены стаканы, внутри кгикдого из KOTOI«X установлен подпружиненный поршень с резьбовым отверстием дпя штока, имеющего сферическую головку на свободном конце,
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 615030, кл. В 66 С 1/32, 1976 (прототип) .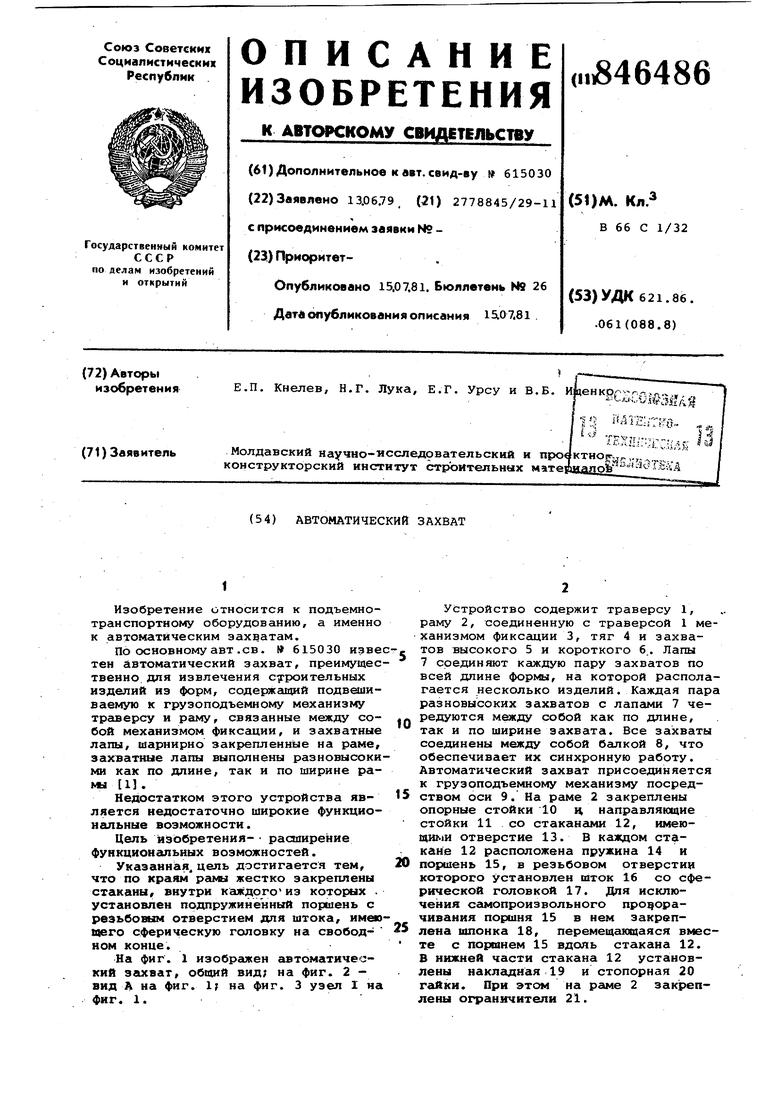
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический захват | 1976 |
|
SU615030A1 |
| Грузозахватное устройство для железнодорожных звеньев | 1990 |
|
SU1729999A1 |
| АВТОМАТИЧЕСКИЙ ЗАХВАТ РОДОВИКОВА | 2009 |
|
RU2394747C1 |
| Захватное устройство для грузов | 1979 |
|
SU839981A1 |
| Захватное устройство для длинномерных изделий | 1988 |
|
SU1731718A1 |
| Грузозахватное устройство | 1978 |
|
SU724427A1 |
| Захватно-разделительное устройство | 1981 |
|
SU1000373A1 |
| Захватное устройство для пакетов плит | 1975 |
|
SU587078A1 |
| Захват-кантователь для колонн | 1982 |
|
SU1071568A1 |
| Автоматический захват | 1983 |
|
SU1174366A1 |