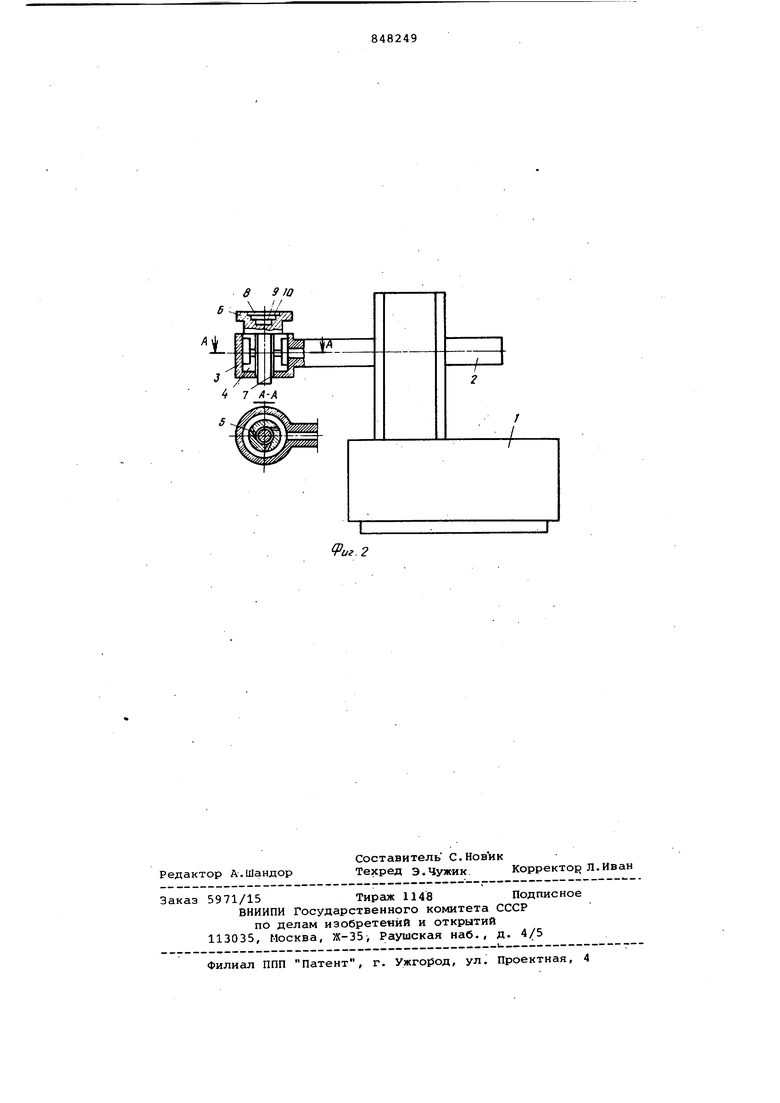
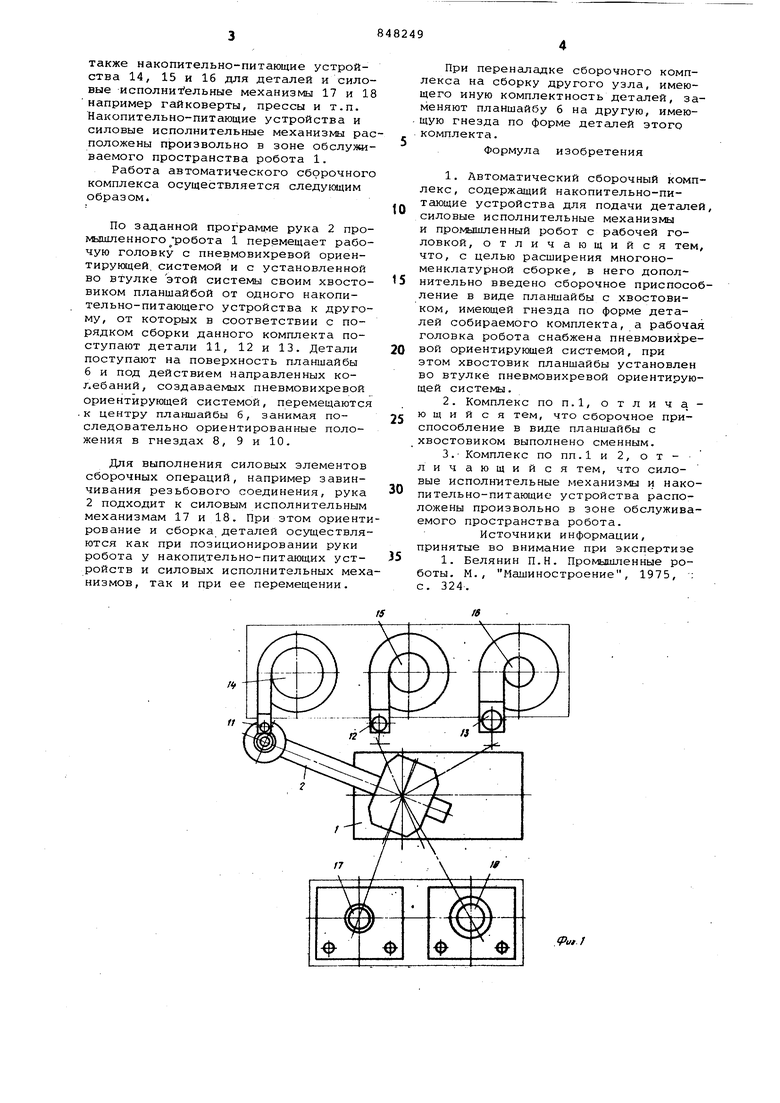
Изобретение относится к машиностроению и может быть использовано при автоматизации сборочных операИзвестен комплекс технологическог оборудования, содержащий накопительно-питающие устройства для подачи деталей, силовые исполнительные механиэкы и промлшленный ррбот с рабочей головкой 1. Известный комплекс не может быть применен при многономенклатурной сборке узлов. Он может быть применен только для работы с узлами, имеющими- определенную комплектность в них. Для работы с другими уз лами требуются -сложные настройки всех агрегатов комплекса, что усложняет переналадку комплекса в целом и сужает его технологические возможности . Цель изобретения - расширение тех нологических возможностей и упрседени перенёшс1дки комплекса -при многономен клатурной сборке. достигается тем, что в комп лекс дополнительно введено сборочно приспособление в виде планшайбы с хвостовиком, имеющей гнезда по форм деталей собираемого комплекта, рабочая головка робота снабжена пневмовихревой ориентирующей системой, причем хвостовик планшайбы установлен во втулке пневмовихревой ориентирующей системы. Кроме того, сборочное приспособление выполнено сменным. Силовые исполнительные механизг вл и накопительно-питающие устройства расположены произвольно в зоне обслуживаемого пространства робота. На фиг. 1 изображена общая схема автоматического сборочного комплекса; на фиг. 2 - промышленный робот, продольный разрез. Автоматический сборочный комплекс имеет прокышленный робот 1 с рукой 2, снабженной рабочей головкой 3, содержащей пневмовихревую ориентирующую систему, выполненную в виде втулки 4 с соплаг 5, направленными по касательной к .ее отверстию, сборочное приспособление в виде планшайбы 6 с хвостовиком 7, расположенным во втулке 4 пневмовихревой ориентирукадей системы, причем на поверхности планшайбы 6 выполнены гнезда 8, 9 и 10 под детали 11, 12 и 13 собираемого комплекта, а
также накопительно-питающие устройства 14, 15 и 16 для деталей и силовые испоянительные механизмы 17 и 18 например гайковерты, прессы и т.п. Накопительно-питающие устройства и силовые исполнительные механизмы расположены произвольно в зоне обслуживаемого пространства робота 1.
Работа автоматического сборочного комплекса осуществляется следующим образом.
По заданной программе рука 2 проышленного робота 1 перемещает рабочую головку с пневмовихревой ориенирующей, системой и с установленной во втулке этой системы своим хвостовиком планшайбой от одного накопительно-питающего устройства к другоу, от которых в соответствии с поядком сборки данного комплекта поступают детали 11, 12 и 13. Детали поступают на поверхность планшайбы б и под действием направленных ко.ебаний, создаваемых пневмовихревой ориентирующей системой, перемещаются к центру планшайбы б, занимая последовательно ориентированные полоения в гнездах 8, 9 и 10.
Для выполнения силовых элементов сборочных операций, например завинчивания резьбового соединения, рука 2 подходит к силовым исполнительным механизмам 17 и 18. При этом ориентирование и сборка деталей осуществляются как при позиционировании руки робота у накопительно-питающих устройств и силовых исполнительных механизмов, так и при ее перемещении.
При перенашадке сборочного комплекса на сборку другого узла, имеющего иную комплектность деталей, заменяют планшайбу б на другую, имеющую гнезда по форме деталей этого комплекта.
Формула изобретения
1.Автоматический сборочный комплекс, содержащий накопительно-питающие устройства для подачи деталей, силовые исполнительные механизмы
и промышленный робот с рабочей головкой, отличающийся тем, что, с целью расширения многономенклатурной сборке, в него дополнительно введено сборочное приспособление в виде планшайбы с хвостовиком, имеющей гнезда по форме деталей собираемого комплекта, а рабочая головка робота снабжена пневмовиз ре0вой ориентирующей системой, при этом хвостовик планшайбы установлен во втулке пневмовихревой ориентирующей системы.
2.Комплекс ПОП.1, отличающийся тем, что сборочное при5способление в виде планшайбы с хвостовиком выполнено сменным.
3.- Комплекс по ПП.1 и 2, о т личающийся тем, что силовые исполнительные механизмы и нако0пительно-питающие устройства расположены произвольно в зоне обслуживаемого пространства робота.
Источники информации, принятые во внимание при экспертизе
1. Белянин П.Н. Промышленные роботы. М., Машиностроение, 1975, : с. 324.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сборки резьбовых соединений | 1980 |
|
SU944859A1 |
| Сборочный автомат | 1982 |
|
SU1144827A1 |
| Автоматический сборочный комплекс | 1987 |
|
SU1521545A1 |
| Сборочный комплекс | 1985 |
|
SU1696244A1 |
| Устройство для сборки комплекта деталей | 1988 |
|
SU1537438A1 |
| Автомат для сборки деталей | 1984 |
|
SU1234151A1 |
| Многопозиционное зажимное устройство | 1981 |
|
SU975305A1 |
| Многопозиционное захватное устройство | 1981 |
|
SU994254A1 |
| Поворотный стол для автоматической сборки деталей | 1979 |
|
SU772789A1 |
| Переналаживаемая роботизированная система | 1981 |
|
SU998097A1 |