1
Устройство относится к машиностроению, в частности к промышленньш работам, и может быть использовано в различных отраслях народного хозяйства при -автоматизации производственных процессов.
Известен захват манипулятора, содержащий корпус, зажимные губки, установленные с -возможностью их параллельной сходимости и связанные посредством зубчато-реечной передачи с приводным устройством
Однако зажимные губки известного захвата имеют податливость относительно корпуса лишь по одной координате, позтому он не обеспечивает необходимой точности работы манипулятора .
Целью изобретения явдтяется повышений точности работы манипулятора.
Для достижения поставленной цели он снабжен смонтированными в корпусе сферической опорой, траверсой, установленной с возможностью осевого перемещения в упомянутой опоре, направляющими с установленными в них подпружиненными сухарями, кареткой, стяжкой, шарнирно связанной с ней одним концом и регулируемыми упорами, установленшлми с возможное
тью взаимодействия с кареткой, причем на одном конце траверсы закреп- . лен захват, второй ее конец выполнен вильчатым и снабжен сферическими опорными элементами, установленными с возможностью взаимодействия с сухарями, а второй конец стяжки шарнирно связан с вильчатым концом траверсы.
10
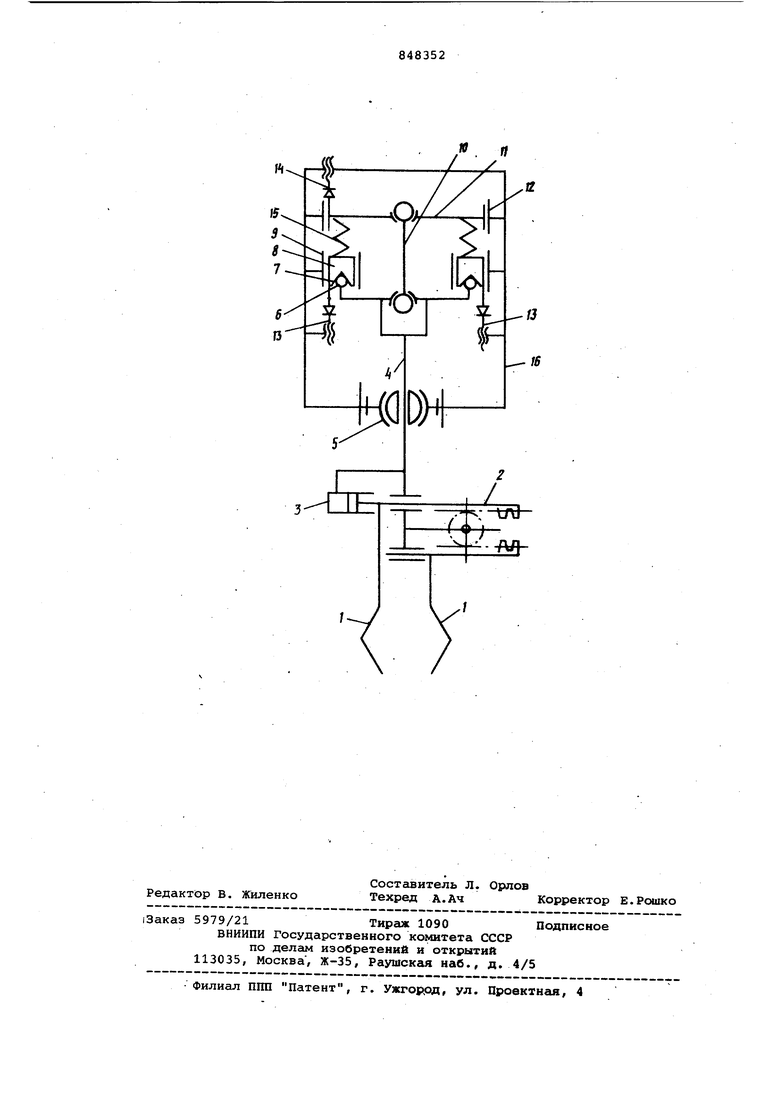
На чертеже показана кинематическая схема захвата манипулятора.
Захват манипулятора содержит зажимные губки 1, смонтированные с возможностью их параллельной сходи15мости и связанные посредством зубчато-реечной передачи 2 с приводным устройством 3. Захват содержит также траверсу 4, установленную с возможностью осевого перемещения в сфери2dческой опоре 5. Один конец траверсы выполнен вильчатым со сферическими опорными элементами б на концах.
Опорные элементы б взаимодействуют с коническими углублениями 7 суха
25 рей 8, установленных в направляющих 9.
Стяжки 10 шарнирно связаны с вильчатым концом траверсы 4 и также шарнирно - с кареткой 11, установлен30ной в направлякмцих 12. Перемещение сухарей каретки ограничивается регулируемыми упорами 13 и 14. Сухари и каретка взаимно подпружинены пруя(йной 15. Все элементы захвата смонтированы в корпусе 16.
Захват манипулятора работает следующим образом.
При ваточном выходе руки в задан ное положение, зажимные губки 1 могут перемещаться по заданным координатам, , в зависи1У1ости от того, по катким из них имеет место погрешность манипулирования.
При перемещении губок 1с траверсой 4 в направлении к сферической опоре 5, сферические опорные элементы 6, взаимодействуя с коническими, углублениями 7 сухарей 8, воздействуют на упор 14 через сухари, пружину 15 и каретку 11.
При перемещении губок 1 с траверсой 4 в противоположном направлении траверса воздействует на упоры 13 через стяжку 10, каретку 11, пружину 15 и сухари 8.
Таким образом, при перемещении губок 1 в осевом направлении компенсируется погрешность манипулирования по соответствующей координате и пружины 15 запасают потенциальную энергию для возвращения губок в исходное положение.
Компенсация погрешности манипулирования по угловым координатам осуществляется следующим образом.
При повороте губок 1 с траверсой 4 вокруг любой оси, хотя бы один из сферических опорных элементов 6, взаимодействуя с коническим углублением 7 соответствующего сухаря 8, воздействует на упор 14 через сухарь, пружины 15 и каретку 11. Компенсация погрешности манипулирования по любой координате является комбинацией перемещений захвата в вышеописанных частных случаях. Пог-
решности по заданным координатам компенсируются благодаря тому, что траверса 4 установлена в сферической опоре 5 с возможностью осевого перемещения в ней, а возвращение J губок 1 в исходное положение происходит благодаря накапливанию пружиной 15 потенциальной энергии при перемещении траверсы.
Использование предлагаемого устQ ройства позволяет -снизить требования к изготовлению манипулятора, в результате чего снижаются затраты на его изготовление.
Формула изобретения
Захват манипулятора, содержащий корпус, зажимные губки, установленные с возможностью их параллельной сходимости и связанные посредством зубчато-реечной передачи с приводным устройством, отличающийся тем, что, с целью повышения точности работы манипулятора, он снабжен 5 смонтированными в корпусе сферической опорой, траверсой, установленной с возможностью осевого перемещения в упомянутой опоре, направляющими с установленными в них подпружиненны., ми сухарями, кареткой, стяжкой, шарнирно связанной с ней .одним концом и регулируемыми упорами, установленными с возможностью взаимодействия с кареткой, причем на одном конце - траверсы закреплен захват, второй
ее конец выполнен вильчатом и снабжен сферическими опорными элементами, установленными с возможностью взаимодействия с сухарями, а второй конец стяжки шарнирно .связан с вильчатым 0 концом траверсы.
Источники информации, принятые во внимание при экспертизе
1. Заявка Японии № 49-38345, кл. 83(3) В 21, 1974.
№
,
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| Установка для центробежной биметаллизации втулок | 1984 |
|
SU1260110A1 |
| Захват | 1977 |
|
SU667396A1 |
| Захват манипулятора | 1984 |
|
SU1333573A1 |
| Устройство для определения прочности сцепления кирпича с раствором | 1980 |
|
SU951118A1 |
| Захват промышленного робота | 1979 |
|
SU841962A1 |
| Захват манипулятора | 1982 |
|
SU1126431A1 |
| Установочная каретка для центрирования и зажима грифов музыкальных инструментов | 1985 |
|
SU1276492A1 |
| Устройство к прессу для манипулирования обработанной деталью | 1980 |
|
SU990381A1 |
| Манипулятор | 1977 |
|
SU707792A1 |