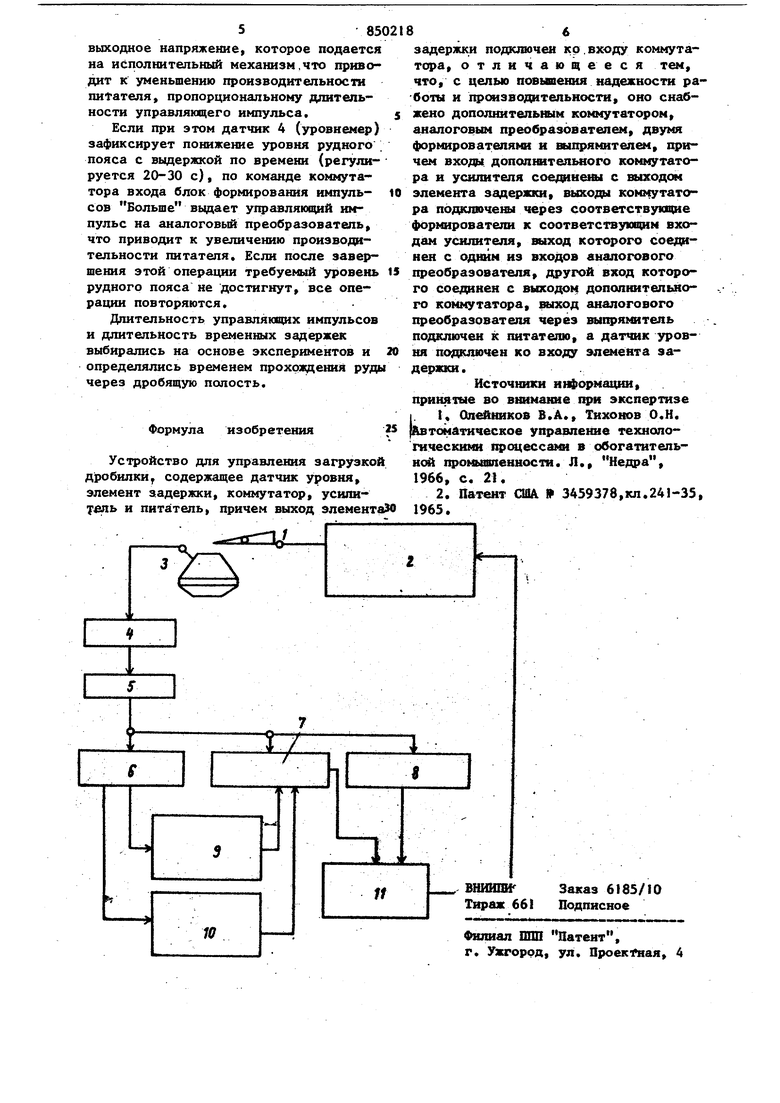
(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЗАГРУЗКСЙ Изобретение относится к системам управления загрузкой дробилок и может быть использовано в горнообогатительной промышленности, на предприятиях химической промьшшенности и производства строительных материалов . Известно устройство дпя управления автоматической загрузкой дробилки, содержащее датчик контроля регулируемого параметра, схему задержки и силовую тиристорную сборку, через которую осуществляется регулирование работы питателя. Работа этого устрой ства предусматривает контроль параметра, достижение уставочного значения которого приводит к временному резкому снижению или полному прекращению подачи материала l . .Однако в связи с тем, что при изменении физико-механических свойств руды изменяется время ее прохождения через дробящую зону, это устройство не обеспечивает оптимальную заг ДРОБИЛКИ рузку дробилки, что приводит к снижению производительности оборудования, повышеншо расхода электроэнергии, повышению нагрузок на механизм и детали дробилок. Наиболее близким к предлагаемому является устройство для управления загрузкой дробилки, содержащее датчик уровня, элемент задержки, коммутатор, усилитель и питатель, причем выход элемента задержки подключен ко входу коммутатора t2J. Однако при работе питателя с максимальной производительностью в какой-то момент датчик контроля уровня параметра фиксирует перегрузку дробилки. Тогда с выдержкой по времени, необходимой для устранения срабатывания системы на единичный выброс, регулятор начинает плавно через исполнителыгде д4еханизм 1 снижать произв.одительность питателя. Таймер, который управляет опросом состояния датчика контроля и регулятора, с опре38деленной дискретностью выдает управляющие импульсы со скважностью меньшей, чем время, необходимое для устра нения рассогласования текущего значения параметра с уставкой. Производительность питателя продолжает плавно снижаться до момента следующего опроса датчика. После опроса система или Продолжает снижать производительность или начинает ее увеличивать, если контролируемый параметр достигает ниж него граничного значения. Опрос датчика прстсходит через 3 мин, а значений уставок достаточно велик, поэтому рабочая точка контролируемого параметра (текущее значение) за счет инерционности механизмов находится в основном где-то между уставками, не достигая их. Вторая ветвь система включает контроль аварийного уровня слоя руды в приемной емкости дробилки с регулированием по тому же алгоритму. Однако учитывая, что физикомеханические свойства руды могут изменяться в значительных пределах, разнос значений уставок параметра существенный. Позтому система работает с весьма ощутимым раскачиванием и при этом производительность дробил. ки не стабильна. Цель изобретения - повышение надежност работы и производительности Поставленная цель достигается тем что устройство для управления загруз кой даобилки, содержащее датчик уров ня, элемент задержки, коммутатор, усилитель и питатель, причем выход злемента задержки подключен ко входу коммутатора, снабжено дополнительным коммутатором, аналоговым преобразова телем, двумя формирователями и мителем, 1фичем входы дополнительного крммутатора и усилителя соединены с выходом элемента задержки, аиходи коммутатора подключешлгчерез соот ветствующие формирователи к соответствующим входам усилителя, выход которого соединен с одним из входов шалогового преобразователя, другой вход которого соединен с П11ходом дополнительного коммутатора, выход аналогсшого преобразователя через вьшрямитепь подключен к питателю, а датчик уровня подключен ко входу эле мента задержки. На чертеже представлена блок-схем устройства. 8 Устройство содержит питатель 1, тиристорный выпрямитель 2, дробилку 3, датчик 4 уровня, элемент 5 задержки, коммутатор 6, усилитель 7, дополнительный коммутатор 8, формирователи 9 и 10, аналоговый преобразователь П. Устройство работает следующим образом. Рудопитатель 1, производительность которого регулируется через управляемой тиристорный выпрямитель 2, подает в дробилку 3 руду, толщину слоя которой (рудный пояс) контролирует датчик 4. Блок 5 задержки предохраняет систему от ложного срабатывания на единичный выброс контролируемого параметра. Коммутатор 6 входа выполняет задачу управления формирователями импульсов Больше 9 и Меньше 10, которые через коммутатор выхода 7, являющийся практически усилителем 7, имекяцим на входе схему стробирования, управляет, в свсио очередь, аналоговым преобразователем 11. Коммутатор 8 уровня, воздействуя на аналоговый преобразователь И, при достижении граничного значения параметра (толщины слоя рудного пояса) позволяет скачком изменить выходное напряжение преобразователя. Аналоговый преобразователь 1 служит для управления исполнительным механизмом (он имеет линейную выходную характеристику) и, получив импульс управления, он изменяет и запоминает свое выходное напряжение. Изменившееся на выходе преобразователя напряжение приложено к исполнительному йеханизму, что приводат к изменению прсдаз-, водительноста рудопнтателя 1. Если датчик 4 зафиксирует достижение контролируемого уровня руды, тогда с выдержкой по времени вступают в : работу коммутато входа и уровня, ; Коммутатор уровня скачком - сбрасывает производительность рудопитателя на 25% от текущего значения(независимо от ее величин14 Одновременно с эоим по команде коммутатора входа блок формирования импульсов Меньше вьщает управлякнций импульс. Если в течение регулируемого периода времени (практически это 6-8 с) уровень не понижается, появляется следующий управляющий импульс, который через коммутатор выхода прикладывается к аналоговому преобразователю. При получении импульса преобразователь уменьшает свое
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования производительности конусной дробилки | 1982 |
|
SU1039561A1 |
| Способ регулирования загрузки конусной дробилки | 1982 |
|
SU1079292A1 |
| Система регулирования трехстадийного комплекса дробления | 1986 |
|
SU1450861A1 |
| Устройство допускового контроля параметров | 1991 |
|
SU1800380A1 |
| Устройство допускового контроля параметров | 1991 |
|
SU1798719A1 |
| Система управления дробилкой | 1990 |
|
SU1771814A1 |
| Устройство для автоматического регулирования температуры | 1988 |
|
SU1645945A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ ДРОБЛЕНИЯ МАТЕРИАЛА | 2001 |
|
RU2204438C1 |
| Устройство для управления многостадийным процессом дробления | 1982 |
|
SU1036374A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ОСЕВОГО ПЕРЕМЕЩЕНИЯ ВАЛА | 1996 |
|
RU2129212C1 |
