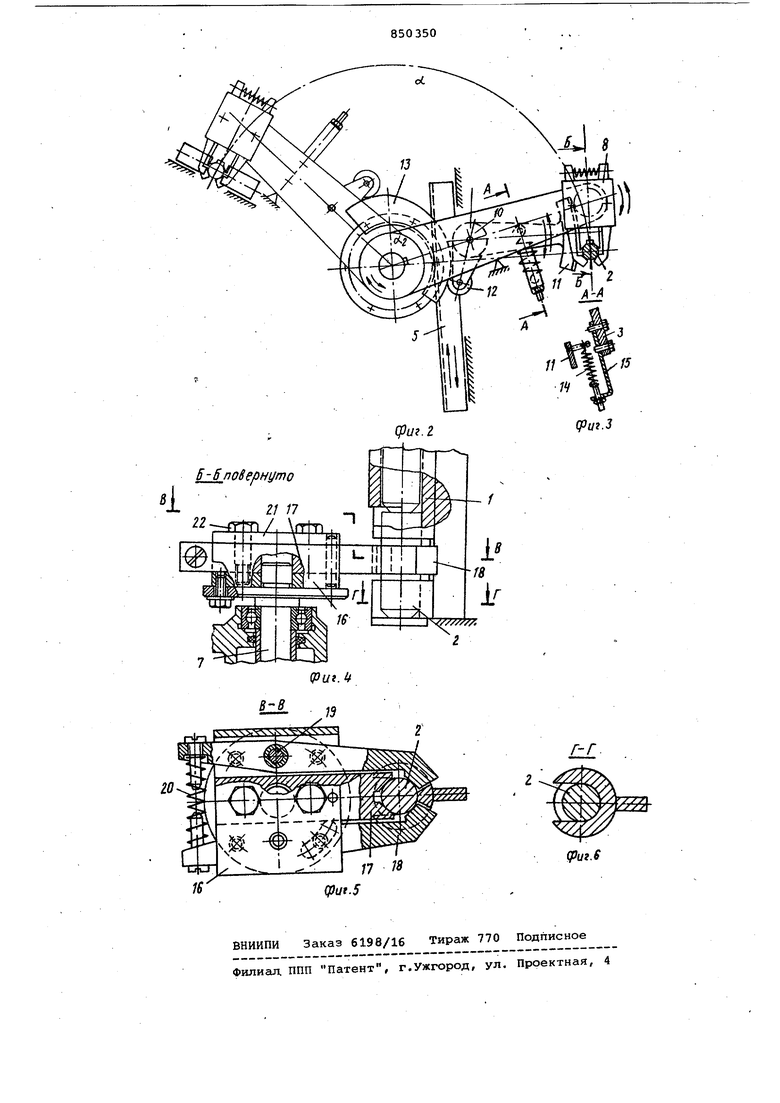
Изобретение относится к автоматическим загрузочным устройствам, пред назначено для транспортировки деталей типа болтов, штифтов, шпилек и обеспечивает их поштучную вьщачу в рабочую зону станков, работающих в автом тическом и полуавтоматическом цикле. Устройство может йлть использовано как загрузочное при выполнении кузнечно-прессовых, токарных и сверлильных работ. Известна механическая рука, содер жащая корпус, поворотный рычаг, захват, смонтированный на конце этого 1ждчага, и приводы }. Однако известное устройство конструктивно сложно, ненадежно в работе- и имеет низкую производительность Цель изобретения - упрощение конструкции и расширение технологически возможностей. Поставленная цель достигается тем что механическая рука снабжена копиром, установленным на корпусе, двуплечим ралчагом, шарнирно связанным с поворотным рычагом, зубчатым сектором, установленным на одном плече двуплечего ялчага, роликом, установленным на дс)угом плече этого рычага с возможностью взаимодействия с копиром, осью, установленной с возможностью поворота на свободном конце поворотного рычага, а также жестко закрепленной на этой оси шестерней, находящейся в зацеплении с зубчатым секасором. На фиг. 1 показана кинематическая схема механической руки, вид спереди/ на фиг. 2 - то же, вид сверху; на фиг. 3 - разрез А-А на фиг. 2) на фиг. 4 - разрез Б-Б на фиг. 2; на фиг. 5 - разрез В-В на фиг. 4; на фиг. б - разрез Г-Г на фиг. 4. В стояке 1 наход ятся детали 2, транспортируемые механической рукой. Основная деталь механической руки поворотный рычаг 3, жестко закрепленный на валу 4 и имею1дий возможность поворота на угол «Х под действием реечной передачи. Рейка 5 поворачивает шестерню 6, жестко закрепленную на валу 4. На свободном конце поворотного рычага 3 находится ось 7, вращающаяся в подшипниках. На верхнем конце оси 7 крепится поворотная головка 8, а на нижнем жестко закреплена шестерня 9. Посередине поворот.ного рычага 3 шарнирно установлен дву-плечий рычаг 10, на одном из плеч которого выполнен зубчатый соктор 11, а на другом плече установлен ролик 1 KOftai ttst контактирует с рабочей поверхностью копира 13. Постоянство контакта обеспечивается пружиной 14, которая одним концом прикреплена к двуплечему рычагу 10, а другим через планку 15 - к поворотному рычагу 3. Поворотная головка 8 крепится болтами к фланцу, установленному на оси 7, и содержит корпус 16 с пазом, внутри которого крепится призма 17, и вставляются два заяммных рычага (захвата) 18, поворачивающихся на осях 19 и подпружиненных пружинами 2 На корпус 16 сверху устанавливается крышка 21 и закрепляется болтами 22 Устройство работает следующим образом. Исходным положением механической руки считается, когда зажимные рытаги 18 зажали деталь 2, находящуюся в стояке. При движении рейки 5 (приводимой в движение от любого привода например пневмоцилиндра) рычаг 3 начинает поворачиваться справа налево и деталь 2 отделяется от столба деталей, находящегося в стояке 1. Головка 8 йри повороте рычага 3 на угол Л-,) относительно оси рычага 3 не поворачивается, так как в это время вытаскивается деталь 2 из стоя ка 1. Поверхность рабочей дорожки на копире на этом участке цилиндрическая. Рычаг 3 продолжает поворачиваться до тех пор, пока ролик 12 не перейдет на криволинейную поверхност копира 13. Затем начинает поворачиваться двуплечий рычаг 10 и через зу Чатый сектор 11 передает вращение шестерне 9, которая поворачивает головку 8 с зажатой деталью 2. Голов ка 8 прекращает поворачиваться относительно оси рычага 3, не доходя до рабочей зоны станка на угол . На рабочей позиции деталь 2 зажимается в приспособлении станка, например в двухкулачковом патроне. При обратном ходе рычага 3 захваты 18 разжимсцотся, оставляя деталь 2 в зажатых кулачках на рабочей позиции, головка 8 продолжает поворачив.аться, пока рычаг 3 не дойдет до стояка 1 на угол 0 , после чего ее поворот прекращается, а рычаг 3 продолжает поворачиваться. Захваты 18 своими скосами утыкаются в деталь 2, находящуюся в стояке, отжимаются и захватывают новую деталь. Далее цикл повторяется. Механическая рука проста по конструкции, удобна в эксплуатации и повышает производительность, так как зажим детали, поворот головки 8 и разжив детали происходят во время поворота рычага 3. Формула изобретения Механическая рука, содержащая корпус, поворотный рычаг, захват, смонтированный на конце этого рычага, и приводы, отличающаяся тем, что с целью упрседения конструкции и расширения технологических возможностей, она снабжена копиром, установленным на корпусе, двуплечим рычагом, шарнирно связанным с поворотным рычагом, зубчатым сектором, установленным на одном плече двуплечего рычага, роликом, установленным, на другом плече этого рычага с возможностью взаимодействия с копиром, осью, установленной с возможностью поворота на свободном конце поворотного рычага, а также жестки закрепленной на этой оси шестерней, находящейся в зацеплении с зубчатым сектором. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 680052, кл. В 23Q 7/04, 1977. 8
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1991 |
|
SU1813620A1 |
| Машина для подвязки растений к шпалерной проволоке | 1986 |
|
SU1373361A1 |
| Многопозиционный станок для отгибки фланцев и зиговки полых деталей из листового материала | 1982 |
|
SU1044382A1 |
| Многопозиционный станок | 1987 |
|
SU1454652A1 |
| Копировальная фрезерно-шлифовальная головка | 1976 |
|
SU558760A2 |
| Многопозиционный автомат для обработки изделий типа корпуса наручных часов | 1957 |
|
SU117374A1 |
| Универсальный агрегат для виноградников | 1986 |
|
SU1443850A1 |
| Устройство для упаковывания цилиндрических изделий | 1984 |
|
SU1303496A1 |
| Устройство к токарному автоматудля СВЕРлЕНия ОТВЕРСТий | 1979 |
|
SU804212A1 |
| АГРЕГАТНЫЙ ГОРИЗОНТАЛЬНО-ФРЕЗЕРНЫЙ СТАНОК ДЛЯ ОБРАБОТКИ КРИВОЛИНЕЙНЫХ ПОВЕРХНОСТЕЙ | 1973 |
|
SU397313A1 |