(54) ИСПОЛНИТЕЛЬНЫЙ ОРГАН ПPO/VlЫШЛEHHOГO РОБОТА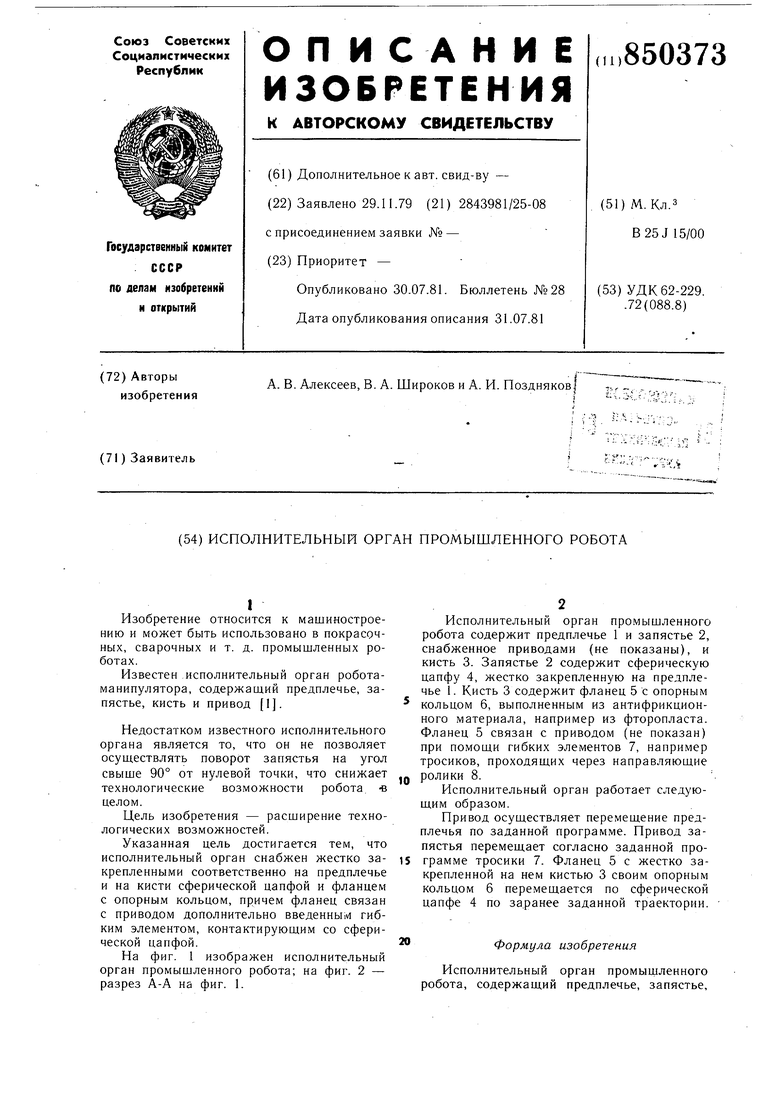
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган промышленного робота | 1979 |
|
SU781054A1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
| Исполнительный орган манипулятора | 1987 |
|
SU1493460A1 |
| КОНТРОЛЛЕР ЗАПЯСТЬЯ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2718568C1 |
| Очувствленное запястье руки робота | 1985 |
|
SU1355486A1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| Исполнительный орган промышленного робота | 1990 |
|
SU1717342A1 |
| ГОЛОВКА ЭЛЕКТРИЧЕСКОЙ ТОЧЕЧНОЙ СВАРКИ ДЛЯ МНОГООСЕВОГО ПРОМЫШЛЕННОГО РОБОТА И РОБОТ, СОДЕРЖАЩИЙ ЭТУ ГОЛОВКУ | 2013 |
|
RU2628451C2 |
| Опора для человека | 2022 |
|
RU2799671C1 |
I
Изобретение относится к машиностроению и может быть использовано в покрасочных, сварочных и т. д. промышленных роботах.
Известен исполнительный орган роботаманипулятора, содержаш.ий предплечье, запястье, кисть и привод 1.
Недостатком известного исполнительного органа является то, что он не позволяет осушествлять поворот запястья на угол свыше 90° от нулевой точки, что снижает технологические возможности робота -в целом.
Цель изобретения - расширение технологических возможностей.
Указанная цель достигается тем, что исполнительный орган снабжен жестко закрепленными соответственно на предплечье и на кисти сферической цапфой и фланцем с опорным кольцом, причем фланец связан с приводом дополнительно введенным гибким элементом, контактирующим со сферической цапфой.
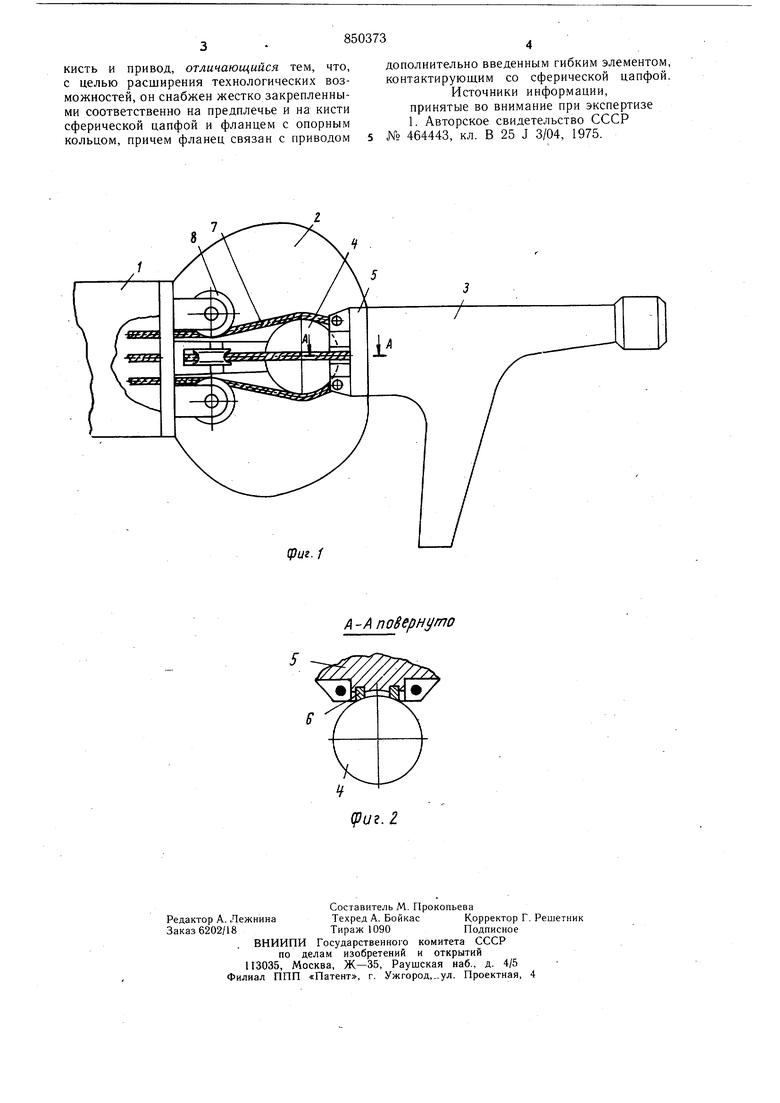
На фиг. 1 изображен исполнительный орган промышленного робота; на фиг. 2 - разрез А-А на фиг. 1.
Исполнительный орган промышленного робота содержит предплечье 1 и запястье 2, снабженное приводами (не показаны), и кисть 3. Запястье 2 содержит сферическую цапфу 4, жестко закрепленную на предплечье 1. Кисть 3 содержит фланец 5 с опорным
кольцом 6, выполненным из антифрикционного материала, например из фторопласта. Фланец 5 связан с приводом (не показан) при помоши гибких элементов 7, например тросиков, проходяших через направляющие
,Q ролики 8.
Исполнительный орган работает следующим образом.
Привод осуществляет перемещение предплечья по заданной программе. Привод запястья перемещает согласно заданной программе тросики 7. Фланец 5 с жестко закрепленной на нем кистью 3 своим опорным кольцом 6 перемещается по сферической цапфе 4 по заранее заданной траектории.
20
Формула изобретения
Исполнительный орган промышленного робота, содержащий предплечье, запястье.
кисть и привод, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен жестко закрепленными соответственно на предплечье и на кисти сферической цапфой и фланцем с опорным кольцом, причем фланец связан с приводом
дополнительно введенным гибким элементом, контактирующим со сферической цапфой.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 464443, кл. В 25 J 3/04, 1975.
А -А повернуто
