(54) УСТЮЙСТВО ДЛЯ ПЕРЕДАЧИ ШТУЧНЫХ ГРУЗОВ С ОДНОЙ ПОЗИЦИИ НА ДРУГУЮ
| название | год | авторы | номер документа |
|---|---|---|---|
| Вилочный погрузчик | 1986 |
|
SU1370062A1 |
| СТАНОК ДЛЯ УПАКОВКИ кип БУМАГИ В ЩИТКИ | 1966 |
|
SU189737A1 |
| Перегрузочное устройство | 1987 |
|
SU1602833A1 |
| Автоматическая линия для производства керамических изделий | 1986 |
|
SU1369898A1 |
| Установка для подачи стержней | 1980 |
|
SU950480A1 |
| ПАКЕТОФОРМИРУЮЩАЯ МАШИНА ДЛЯ ГРУЗОВ В МЯГКОЙ ТАРЕ | 1969 |
|
SU414165A1 |
| Товарный регулятор ткацкого станка | 1982 |
|
SU1101484A1 |
| Грузозахватное устройство стеллажного крана-штабелера | 1990 |
|
SU1752724A1 |
| Грузоподъемник крана-штабелера | 1990 |
|
SU1733347A1 |
| Тележечный конвейер | 1981 |
|
SU1008102A1 |
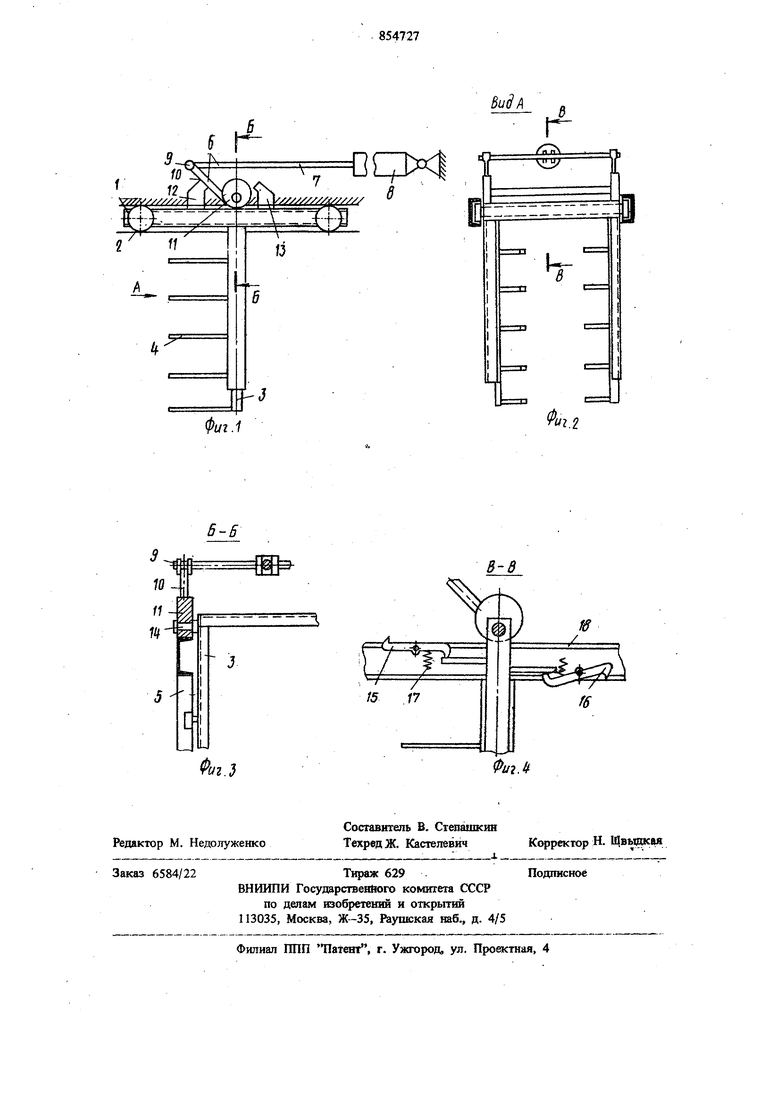
Изобретение относится к подъемно-транспортной технике, в частности к механизмам загрузки вильчатых тележек от накопителя кирпичей, и может быть использовано преимущественно в промышленности строительных материалов при производстве кирпича и подобных ему изделий. Кроме того, оно может найти применение во всех областях народного хозяйства для передачи штучных грузов с одной позиции на другую или несколько других позиций. Известно загрузочно-разгрузочные устройство содержащее несущий орган (вилы), транспортирующий механизм (каретку) и механизм передвижения каретки и подъема вил 1. Наиболее близким по технической сущности к предлагаемому является устройство вильчатого съемника для передачи грузов с одной позиции на другую. Это устройство включает установленную в горизонтальных направляющих каретку с подъемной рамой вил и механизмы Перемещения каретки и рамы вил 2. Однако наличие в этих устройствах двух приводов, один из которых служит для горизонтального возвратно-поступательного движения каретки, другой - для верттсального возвратнопоступательного движения вил, требует дополнительного устройства для их взаил ной синхронизащш и усложняет конструкцию всего устройства. При этом значительно услож1юется схема управления приводами и снижается надежность работы устройства, а также yвeли швaeтcя расход злектрознергии. Цель изобретения - повышение надежности работы и упрощение конструкции устройства. Указшшая цель достигается тем, что в устройстве, включающем установленную в горизонтальных направляющих каретку с подъемной рамой вил, установленной в вертикальных направляющих, и механизм перемещения каретки и рамы вил, последний выполнен в виде щарнирно соединенных между собой рычагов, од1Ш из которых связан с пр1шодом горизонтального возвратно-поступательного перемещеття, а на другом жестко укреплен кулачок, установлеяньи на раме каретки, ось вращения которого жестко связана с рамой вил, при этом каретка снабжена фиксаторами ее крайних положений и ограничителями поворота кулачка, жестко ук38Лепленными на ней, при этом фиксаторы край-; них положений каретки могут быть выполнень I В виде подпружиненных двуплечих рычагов, одни плета которых контактируют с рамой вил а другие с направляющими каретки. Иа фиг. 1 изображено предложенное устройство, вид сбоку; на фиг. 2 - вид А на фиг. 1 на фиг. 3 - сечение Б-Б на фиг. 1; на фиг. 4 - сечение В-В на фиг. 2. Предлагаемое устройство для передачи шт чных грузов с одной позиции на другую включает каретку 1, установленную в горизонтальны направляющих 2, раму 3 с вилами 4, установленную в вертикальных направляющих 5, жест ко укрепленных на каретке, и меха1шзм 6 перемещения каретки 1 и подъема рамы 3. Механизм 6 перемещения каретки и подъем рамы состоит из рычага 7, один конец кото,рого жестко связан со щтоком пневмоищгиндра;8, а другой посредством шарнира 9 соединен с рычагом 10, имеющим на своем конце жестко закрепленный кулачок 11, выполненны в виде эксцентрика. Кулачок 11 установлен на упомянутой каретке 1, имеющей упоры 12 и 13, и насажен с возможностью вращения на ось 4, жестка укрепленную на раме 3. На каретке 1 с возможностью поворота укреплены, фиксаторы крайних положений 15 и 16, выполненные в виде двуплечего рычага, одно плечо которого связано с пруж1шрй 17 и опирается на раму 3, а второе входит в зацепление с выступом 18 на гориз:онтальных направляющих 2 каретки 1. Предлагаемое устройство работает следующим образом. При включении пневмоцилиндра 8 щток его двигаясь вперед, посредством рычага 7 через щарнирное соединение 9 поворачивает рычаг 10с кулачком 11 вокруг оси 14. Благодаря наличию эксцентриситета кулачок 11, поворачиваясь, опускает раму 3 в шгжнее положение после чего рычаг 10 упирается в упор 12, ограничивающий дальнейщее опускание рамы. Которая взаимодействуя с фиксатором 16, рас фиксирует его. При этом, продолжая двигат ся вперед, щток пневмодилшщра 8 передвигает каретку I в горизонтальных направляющих 2 до взаимодействия фиксатора 15 с вы ступом 18 на упомянутых направляющих 2, чем фиксируется крайнее левое положе1ше ка ретки. При обратном ходе пггока пневмодилиндра рычаг 7 через щарнирное соединение 9 поворачивает рычаг 10 с кулачком 11 вокруг оси 14 в обратном иаправле1пп1. При этом кулачок 11, поворачиваясь, поднимает раму 3 с в лами 4 в верхнее положение, подхватывая руз. Затем рьпаг 10 упирается в упор 13, оторый ограничивает дальнейший подъем рамы, последняя, взаимодействуя с фиксатором 15, расфиксирует его. Так как щток пневмоилиндра 8 продолхсает свое движение назад, аретка 1 начинает дзигаться вправо и возвращается в свое исходное положение, которое фиксирует фиксатор 16. Затем цикл повторяется. Использование предлагаемого устройства для передачи щт чных грузов с одной позиции на другую обеспечивает по cpaвнe шю с известными преимущества, заключающиеся в том, что перемещение каретки в горизонтальных направляющих и подъем и опускание рамы с вилами в вертикальных направляющих осуществляются одним пр1гводом, обеспечивается синхронизация и тощая координация взаимных перемещений каретки и рамы вил , точная ориентация груза на позиции, повыщается надежность работы и упрощается конструкция всего устройства. Формула изобретения 1.Устройство для передачи ипучных грузов с одной позиции на другую, включающее установленную в горизонтальных направляющих каретку с подъемной рамой вил, установленной в вертикальных направляющих, и механизм перемещения каретки и рамы вил, отличающееся тем, что, с целью повыщення надежности работы и упрощения конструкции устройства, механизм перемещения каретки и рамы вил выполнен в виде щарнирно соединент 1к между собой рычагов, один из которых связан с приводом горизонтального возвратнопоступательного перемещения, а на друтом жестко укреплен кулачок, установленный на раме каретки, ось вращения которого жестко связана с рамой вил, при этом каретка снабжена фиксаторами ее крайних положений и ограничителями поворота кулачка, жестко укрепленными на ней. 2.Устройство по п. 1, отличающееся тем, что фиксаторы крайних положений г каретки выполнены в виде подпружиненных двуплечих рычагов, одни ппечк которых контактируют с рамой вил, а другие с направляющими каретки. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР N 428011, кл. С 21 D 9/00, 1975. 2.Авторское свидетельство СССР N° 348457, кл. В 28 В 13/00, 1975.
Вид/
%Z.f
С
:-и
Фс
