(54) АВТООПЕРАТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Технологический комплекс для обработки цилиндрических деталей | 1989 |
|
SU1761436A2 |
| Автооператор | 1973 |
|
SU446358A1 |
| Автоматическая линия для обработки деталей типа дисков | 1973 |
|
SU524675A2 |
| Автооператор | 1979 |
|
SU856749A1 |
| АВТООПЕРАТОР ДЛЯ ЗАГРУЗКИ И РАЗГРУЗКИ ДЕТАЛЕЙ12 | 1969 |
|
SU258003A1 |
| Автооператор | 1988 |
|
SU1521576A1 |
| Автооператор | 1970 |
|
SU355848A1 |
| Двухзахватная механическая рука | 1986 |
|
SU1313704A1 |
| Устройство поштучной выдачи деталей на линию центров станка | 1981 |
|
SU952520A1 |
| Автооператор | 1975 |
|
SU550270A1 |
Изобретение относится к области станкостроения, в частности, - к механизашга загрузки и выгрузки деталей типа валов в металлорежущих станках.
Известен автооператор, содержащий руку, на которой установлена с возможностью поворота кисть с верхним и захватами 1 .
Недостатком известного автооператора является недостаточная надежность из-за большого количества подвижных элементов.
Цель изобретения - устра:нение указанного недостатка, а именно повышение надежности за счет упрощения конструкции.
Цель достигается тем, что автооператор снабжен рычагом с фиксатором, при этом рычаг размещен на кисти, фиксатор размещен на одном вз плеч рычага, второе плечо рычага размещено в зеве нижнего захвата, а на руке выполнен паз, предназначенный для взаимодействия с фиксатором, и рычаг подпружинен относ№ тельно руки.
Кроме того, плечо рычага, размещенное в зеве нижнего захвата, выполнено в виде вилки.
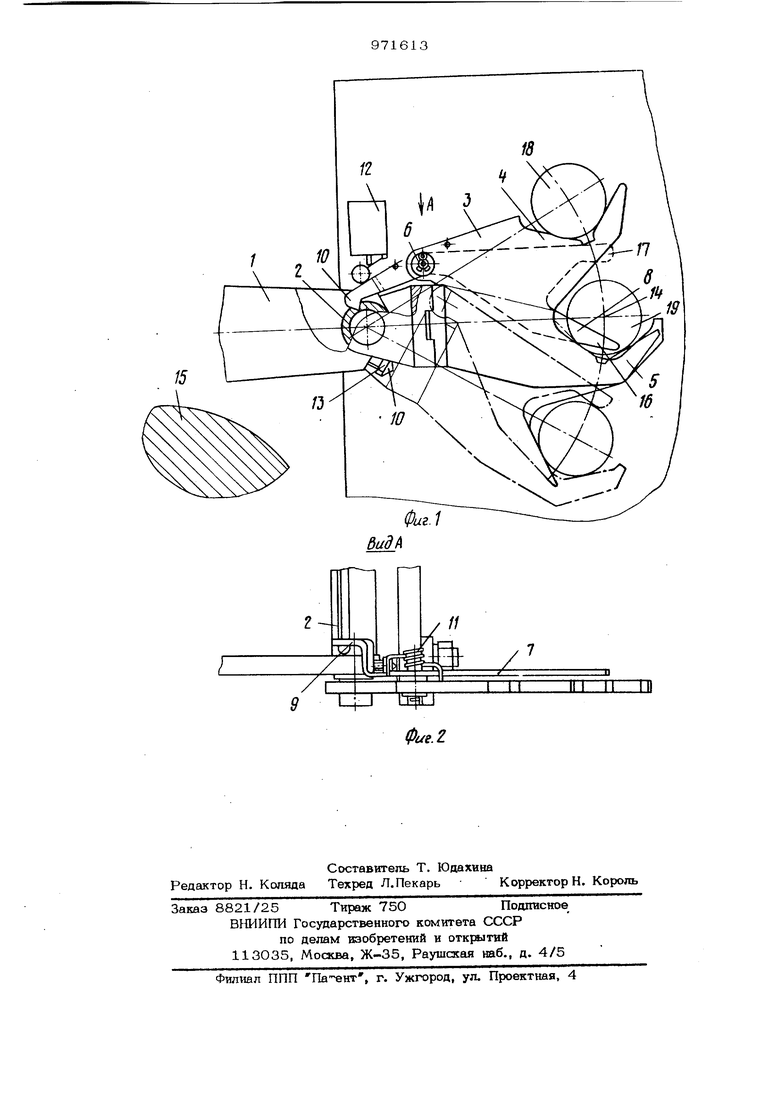
На фиг. 1 показана рука автооператора на загрузочной позиции, вид с торца станка; на фиг. 2 - вид А на фиг. 1.
Автооператор содержит руку 1, на которой с возможностью поворота вокруг оси 2, закрепленной на руке, установлена кисть 3 с двумя захватами, верхним 4 и нижним 5. На кисти с возможностью
10 поворота вокруг оси 6, закрепленной на кисти, установлен рычаг 7. Одно плечо 8 рычага находится в зеве нижнего захвата 5, а второе плечо 9 имеет фиксатор
15 в виде зуба 1О, взаимодействующего с пазом, выполненным на оси 2 поворота кисти. Выполнение паза на оси 2 предполагает наличие в конструкции автооператора двух кистей, расположенных парал20лельно; при возможности работы одной кистью паз может быть выполнен на руке 1. Пружина 11 прижимает плечо 9 к оси 2. Кроме того, плечо 9 взаимодейст.3671
вует с датчиком 12 блока управления автоопоратором. Упор 13 ограничивает поворота кисти. Рука 1 установлена с возможностью перемещения по заданной траектории к оси 14 центров станка от- носительно упора 15, установленного на стамке. Плечо 8, находящееся в зеве нижнего захвата, выполнено в виде вилки с нижним 16 и верхним 17 зубьями. Верхний захват 4 предназначен для съема заготовки 18с лотка загрузочного транспортного устройства (на чертеже не показано) и переноса ее к оси 14 центров станка. Нижний захват 5 предназначен для съема обработанной .детали 19 из
станка и переноса к лотку разгрузочного транспортного устройства (на чертеже не показано).
Автооператор работает следующим образом.
Руке 1 сообщают перемещение по заданной траектории к оси 14 центров станка. При перемещении руки зах:ват 4 снимает заготовку 18с лотка загрузочного транспортного устройства и перемещает ее к оси 14 центров станка. 13 конде хода руки 1 нижний захват 5 заходит под обработанную деталь 19. Деталь воздейС7вует на зуб 16 плеча 8 рычага 7. При дальнейшем движении руки, за счет взаимодействия детали 19с зубом 16 плеча 8, рычаг 7 поворачивается вокруг оси 6, зуб Ю выходит из паза, освобождая кист 3. Когда рука дойдет до конечного положения, поступает сигнал от датчика (на чертеже не показан) на разжтаи детали 19, и кисть под действием собственного веса и веса детали 19 и заготовки 18 поворачивается вниз до упора 13. При этом заготовка 18, находящаяся в захвате 4, попадает на ось центров 14 станка на обработку. Верхний зуб 17 плеча 8 рычага 7 и поверхность нижнего захвата 5 удержтшают деталь 19 от выпадания. При этом плечо 9 воздействует на датчик 12, выдающий сигнал о наличтги в захва34
те 5 обработанной детали в блок управления автооператором, исключая работу автооператора вхолостую. После зажима заготовки 18 в центрах оси 14 станка рука возвращается по заданной траектории в исходное положение, перенося деталь 19 на лоток разгрузочного устройства. При перемещении руки 1 в исходное положение упор 15 воздействует на кисть 3, возвращая ее в исходное положение. Зуб 10 входит в паз на оси 2, а пружина 11 фиксирует его. Автооператор готов к новому циклу загрузки-выгрузки.
Преимущества предлагаемого автооператора перед известными заключаются в простоте конструкции, так как исключены специальные приводные средства шш поворота кисти руки на загрузочной позиции (поворот кисти осуществляется за счет силы тяжести детали), и, как следствие, упрощении управления работой автооператора.
Формула изобретения
Источнжи информации, принятые во внимание при экспертизе
