ющим механизмы захвата 3, выполненные, например, в внде вращающихся воронок.
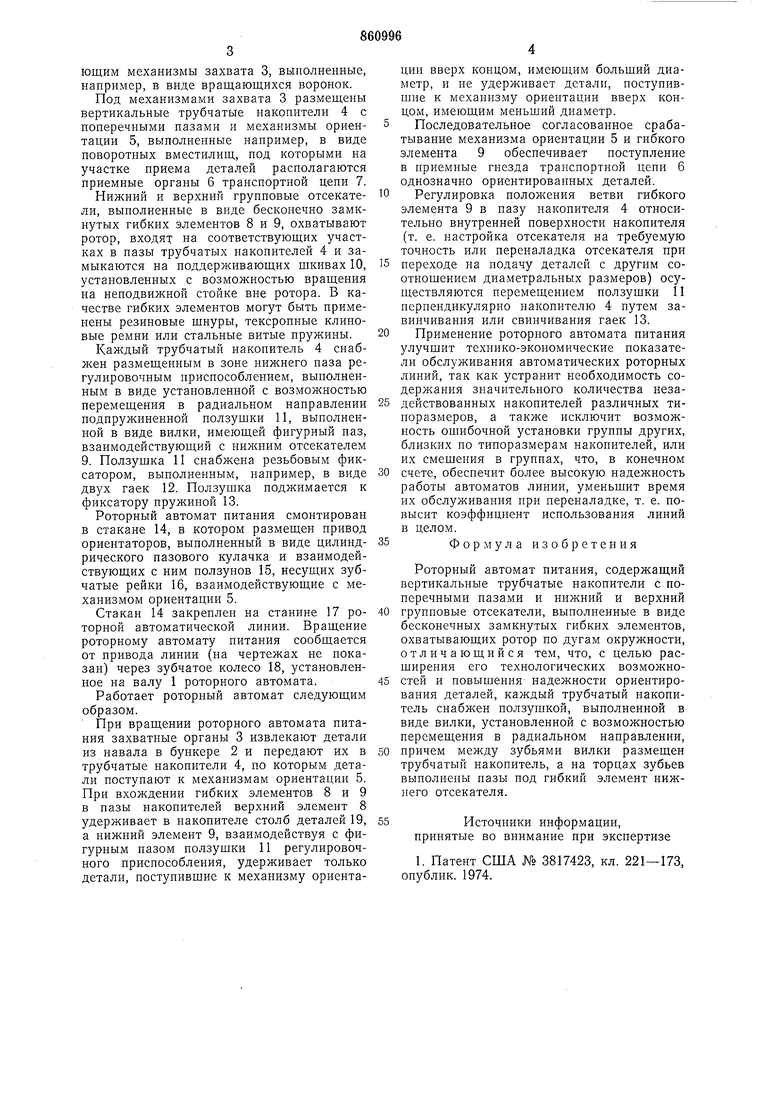
Под механизмами захвата 3 размещены вертикальные трубчатые накопители 4 с понеречиыми пазами и механизмы ориентации 5, выполненные например, в виде поворотных вместилищ, под которыми на участке приема деталей располагаются приемные органы 6 транспортной цепи 7.
Нижний и верхний групповые отсекателн, выполненные в виде бесконечно замкнутых гибких элементов 8 и 9, охватывают ротор, входят на соответствующих участках в пазы трубчатых накопителей 4 и замыкаются на поддерживающих шкивах 10, установленных с возможностью вращения на неподвижной стойке вне ротора. В качестве гибких элементов могут быть применены резиновые шнуры, тексропные клиновые ремии или стальные витые пружины.
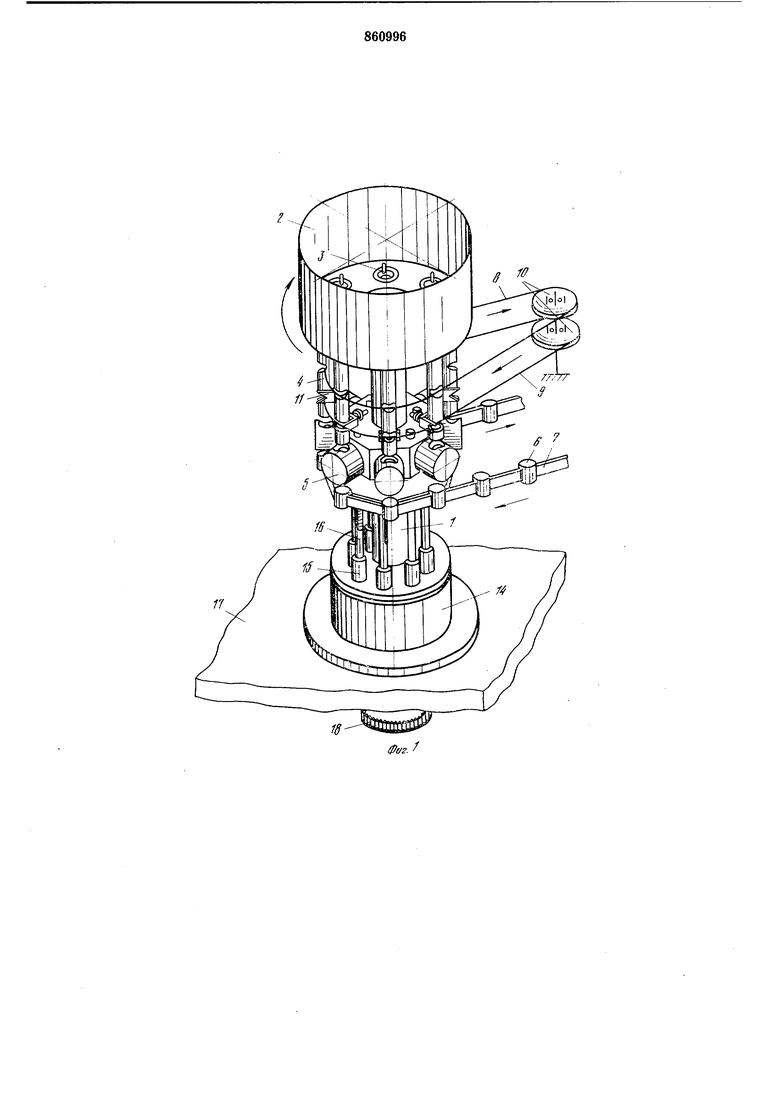
Каждый трубчатый накоиитель 4 сиаблсен размещенным в зоне нижнего паза регулировочным приспособлением, выполненным в виде установленной с возможностью перемещения в радиальном направлении подпружиненной ползушки И, выполненной в виде вилки, имеющей фигурный паз, взаимодействующий с нижним отсекателем 9. Ползушка 11 снабжена резьбовым фиксатором, выполненным, например, в виде двух гаек 12. Ползушка поджимается к фиксатору пружиной 13.
Роторный автомат питания смонтирован в стакане 14, в котором размещен привод ориентаторов, выполненный в виде цилиндрического пазового кулачка и взаимодействующих с ним ползунов 15, несущих зубчатые рейки 16, взаимодействующие с механизмом ориеитации 5.
Стакан 14 закреплен на станине 17 роторной автоматической линии. Вращение роторному автомату питания сообщается от привода линии (на чертежах не показан) через зубчатое колесо 18, установленное на валу 1 роторного автомата.
Работает роторный автомат следующим образом.
При вращении роторного автомата питания захватные органы 3 извлекают детали из навала в бункере 2 и передают их в трубчатые накопители 4, по которым детали поступают к механизмам ориентации 5. При вхождении гибких элементов 8 и 9 в пазы накопителей верхний элемент 8 удерживает в накопителе столб деталей 19, а нижний элемент 9, взаимодействуя с фигурным пазом ползушки 11 регулировочного приспособления, удерживает только детали, поступившие к механизму ориентации вверх концом, имеющим больший диаметр, и не удерживает детали, поступившие к мехаппзму ориентации вверх концом, имеющим меньший диаметр. Последовательное согласованное срабатывание механизма ориентации 5 и гибкого элемента 9 обеспечивает поступление в приемные гнезда транспортной цепи 6 однозначно ориентированных деталей.
Регулировка положения ветви гибкого элемента 9 в пазу накопителя 4 относительно внутренней поверхности накопителя (т. е. настройка отсекателя на требуемую точность или переналадка отсекателя при
переходе на подачу деталей с другнм соотношением диаметральных размеров) осуществляются перемещением ползушкн II перпендикулярно накопителю 4 путем завинчиваиия илн свинчивания гаек 13.
Применение роторного автомата питания улучшит технико-экономические показатели обслуживания автоматических роторных линий, так как устранит необходимость содержания значительного количества незадействованных накопителей различных тиноразмеров, а также исключит возможность ошибочной установки группы других, близких по типоразмерам накопителей, или их смешения в группах, что, в конечном
счете, обеспечит более высокую надежность работы автоматов линии, уменьшит время их обслуживания при переналадке, т. е. повысит коэффициент использования линий в целом.
Формула изобретения
Роторный автомат питания, содержащий вертикальные трубчатые накопители с поперечными пазами и нижний и верхний
групповые отсекатели, выполпенные в виде бесконечных замкнутых гибких элементов, охватывающих ротор по дугам окружности, отличаюшийся тем, что, с целью расширения его технологических возможностей и повышения надежности ориентирования деталей, каждый трубчатый накопитель снабжен ползушкой, выполненной в виде вилки, установленной с возможностью перемещения в радиальном направлении,
причем между зубьями вилки размещен трубчатый накопитель, а на торцах зубьев выполнены пазы под гибкий элемент нижнего отсекателя.
Источники информации,
принятые во внимание при экснертизе
1. Патент США № 3817423, кл. 221-173, опублик. 1974.
Г.
//
1
iT.rfTS
уг.
Щ I
fj
-,l-t
1Д
ь5ГЬQ л .. f
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторный автомат питания | 1979 |
|
SU872191A1 |
| Роторный автомат питания | 1987 |
|
SU1524988A1 |
| Роторный автомат питания | 1987 |
|
SU1430228A1 |
| Загрузочный ротор | 1989 |
|
SU1616799A1 |
| Роторный автомат питания | 1986 |
|
SU1371848A1 |
| Загрузочное устройство роторно-конвейерной машины | 1985 |
|
SU1255262A1 |
| Роторный автомат питания | 1987 |
|
SU1491654A1 |
| Устройство для подачи деталей | 1989 |
|
SU1731588A1 |
| Роторный автомат питания | 1976 |
|
SU564139A1 |
| Загрузочный ротор | 1990 |
|
SU1780988A1 |
ё.Ж.1 Ь||И
Дй Р| у
0Мм
Г .i 1 . liiV-i- / - v -. ---J-/-LI--.J / ,1L. -Jv , x j
«ж.-й riijiiij-X.j.-Jrf..:. .., 11 I; 1--T- ;:-: тоД;ф;,
jiii i ;x-y--tii™ -j.C-./-J;;-; J /t li|l|i f
KHI jiitf
//Й
ti гН-г;
,y
,
/y
iiJlH
Щ/
TH
J
Фиг.-5
