(54) РОТОРНЫЙ АВТОМАТ ПИТАНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторный автомат питания | 1987 |
|
SU1562102A1 |
| Роторный автомат питания | 1987 |
|
SU1491654A1 |
| Загрузочный ротор | 1989 |
|
SU1616799A1 |
| Роторно-конвейерный автомат | 1979 |
|
SU856747A1 |
| Автоматическая роторная линия | 1981 |
|
SU952519A1 |
| Роторный автомат питания | 1987 |
|
SU1414555A2 |
| Устройство управления подвижными элементами | 1982 |
|
SU1148759A1 |
| Роторно-конвейерная машина | 1980 |
|
SU948618A1 |
| Роторно-конвейерная машина | 1977 |
|
SU722823A1 |
| Загрузочный ротор | 1991 |
|
SU1816642A1 |
1
Изобретение относится к машиностроению, а более конкретно к роторным автоматам питания для подачи штучных деталей в роторно-конвейерных машинах.
Известен роторный автомат питания, содержаш,ий бункер с механизмами захвата, вертикальные трубчатые накопители с пазами, верхний, и нижний отсекатели, выполненные каждый в виде замкнутых гибких элементов, охватывающих ротор по дугам окружности 1.
Однако в данном автомате не предусмотрен выборочный автоматический отказ от питания какой-либо загрузочной позиции автомата заготовками. Необходимость такого отказа вызывается тем, что какая-либо приемная позиция транспортного конвейера роторно-конвейерной машины может выйти из строя, а ее замена еше не произведена. В этом случае необходимо исключить подачу заготовки в неисправную позицию конвейера, так как может произойти поломка машины. Кроме этого, при выполнении роторно-конвейерной машиной сборочных операций к роторному автомату питания подаются транспортным конвейером носители, в которых уже находится заготовка. Роторный автомат питания подает в носитель следующую заготовку для их последуюш,ей сборки. В случае, если по какойлибо причине в носителе конвейера отсутствует первая заготовка то для исключения некомплектности сборки в этот носитель не следует подавать последуюшие заготовки. Целью изобретения является обеспечение выборочного автоматического отказа от питания заготовками какой-либо загрузочной позиции автомата питания.
Для достижения поставленной цели ав10томат снабжен механизмом управления, основными и дополнительными двуплечими рычагами, установленными на нижнем отсекателе, причем каждый основной двуплечий рычаг установлен с возможностью качания
15 в плоскости, проходящей через ось ротора и ось соответствуюшего этому рычагу трубчатого накопителя, на одном его плече выполнен паз под гибкий элемент отсекателя, а на другом - выступ, размещенный в пазу накопителя, а каждый дополнительный
20 двуплечий рычаг подпружинен относительно основного, установлен с возможностью качания в плоскости, параллельной плоскости качания соответствующего ему основного рычага и взаимодействует с его плечом имеющим выступ.
Кроме того, механизм управления выполнен в виде электромагнита с толкателем, а плечо дополнительного рычага снабжено роликом и взаимодействует с толкателем.
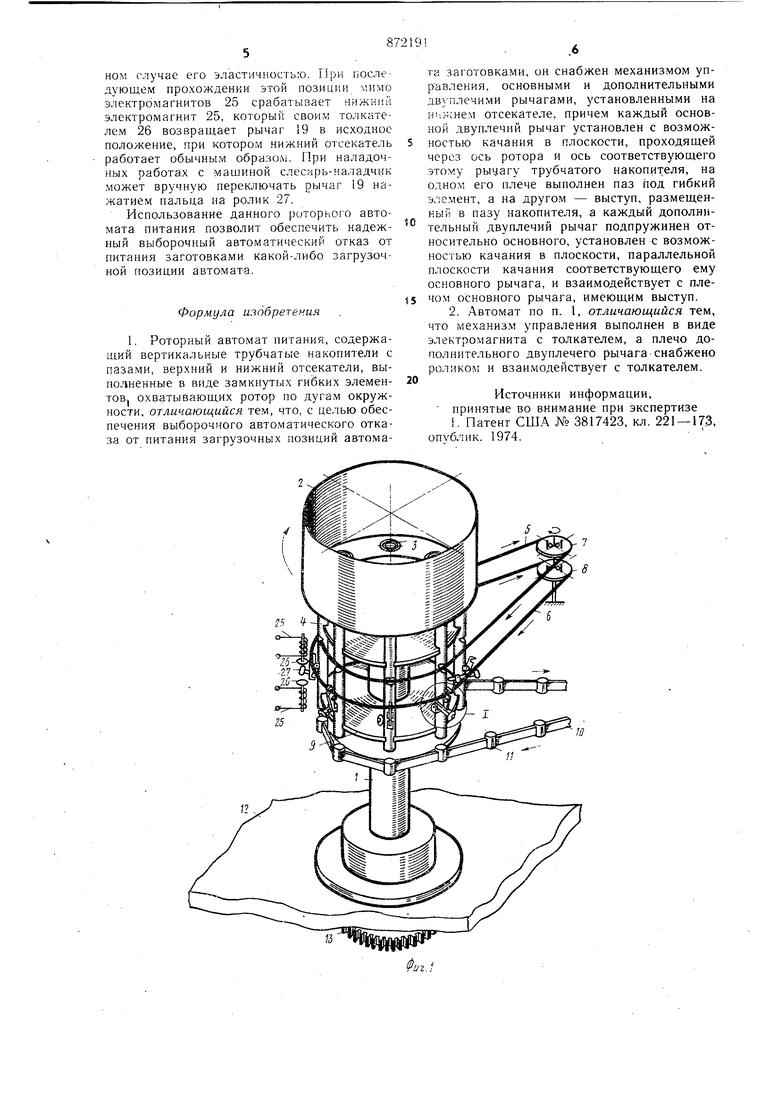
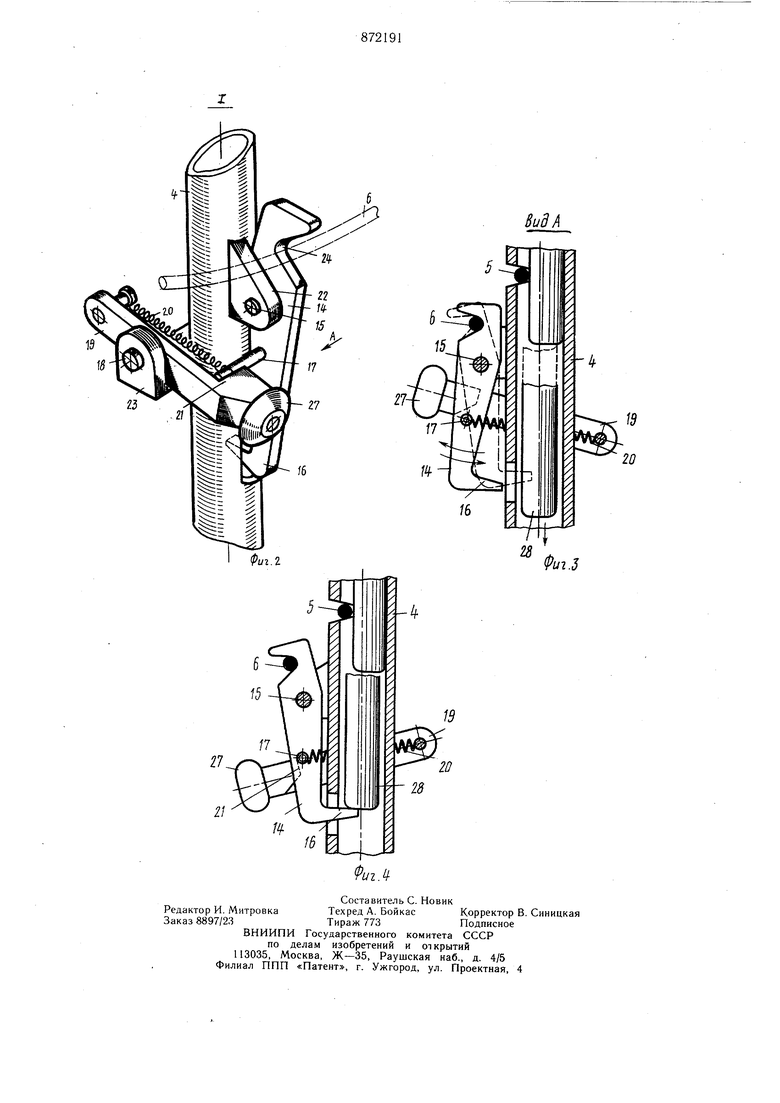
На фиг. 1 изображен роторный автомат питания, общий вид; на фиг. 2 - узел I. на фиг. 1; на фиг. 3 - трубчатый накопитель, частичный разрез (вид А на фиг. 2); на фиг. 4 - то же, момент работы.
Роторный автомат питания содержит вал 1, на котором смонтирован бункер 2 с механизмами захвата в виде, например, вращаемых воронок 3. Соосно воронкам 3 в автомате установлены вертикальные трубчатые накопители 4 с пазами. Автомат снабжен также верхним 5 и нижним 6 отсекателями, выполненными в виде замкнутого гибкого элемента, которые охватывают ротор по дугам соответствующих окружностей, а на противоположной дуге они взаимодействуют с натяжными щкивами 7 и 8. Верхний отсекатель 5 взаимодействует на своей дуге охвата ротора с верхними пазами трубчатых накопителей 4.
Роторный автомат питания содержит также смонтированную на вале 1 звездочку 9, взаимодействующую с транспортным конвейером 10, на котором размещены носители 11 для заготовок. Конвейер 10 охватывает ротор по дуге окружности, на которой носители 11 расположены соосно трубчатым накопителем 4. Вал 1 автомата смонтирован в подщипниках качения (не показаны), размещенных -в станине 12, и в его нижней части смонтировано зубчатое колесо 13, сцепленное с приводом роторно-конвейерной мащины (не показан).
Каждый трубчатый накопитель 4 снабжен двуплечим рычагом 14, установленным с возможностью качения в плоскости, проходящей через ось ротора и ось соответствующего этому рычагу накопителя вокруг оси 15, одно плечо его взаимодействует с нижним замкнутым гибким отсекателем (элементом) 6. На втором плече рычага, выполнен выступ 16, размещенный в нижнем пазу трубчатого накопителя 4, причем на этом плече смонтирован стержень 17. Кроме того, накопитель 4 имеет установленную поперек него защелку, выполненную в виде дополнительного двуплечего рычага поворотного в плоскости, параллельной плоскости качания основного рычага 19 вокруг оси 18, одно плечо которого соединено со стержнем 17 пружиной 20. На другом плече основного рычага 19 выполнен копирный выступ 21. Ось 15 рычага 14 смонтирована на кронщтейне 22, который установлен на трубчатом накопителе 4, а ось 18 рычага 19 смонтирована иа кронщтейне 23, который также установлен на трубчатом накопителе 4.
На плече рычага 14, взаимодействующего с гибким элементом 6, выполнен фигурный паз 24 под -этот элемент.
Автомат снабжен механизмом управления в виде размещенных около ротора элект.ромагнитов 25 с толкателями. 26, а на втором плече рычага 19, имеющем выступ 21, смонтирован ролик 27, взаимодействующий с толкателями 26 электромагнитов 25.
Роторный автомат питания работает,
следующим образом.
При включении роторно-конвейерной мащины в работу при.ходят в синхронное вращение все роторы машины (не показаны), в том числе и роторный автомат питания. Конвейер 10 синхронно перемещается вместе с вра.щением звездочки 9 автомата питания. Заготовки 28 в виде стержней захватьшаются вращаемыми воронками 3 из бункера 2 и направляются в трубчатые накопители 4, в которых столб заготовок 28 удерживается вертикальным рычагом 14, так как его выступ 16 постоянно зходит в нижний паз накопителя и препятствует выходу заготовок 28 из накопителя (см. фиг. 1). На дуге огибания роторного автомата конвейером 10 верхний гибкий отсекатель 5 прижимает последующую заготовку 28 к трубчатому ракопителю 4 и отсекает тем самым столб заготовок 28 в накопителе 4, а нижний гибкий отсекатель 6 воздействует на рычаг 14 и поворачивает его вокруг оси 15. При этом выступ 16 выходит из нижнего па за накопителя 4, и нижняя заготовка 28 падает вниз прямо в носители 11 конвейера 10, который транспортирует их к другигл роторам мащины для их последующей технологической обработки. Таким образом,
, происходит пощтучная загрузка носителей 11 заготовками 28.
В случае-выхода из строя какого-либо носителя 11 необходимо обеспечить отказ питания определенной позиции роторного автомата для конкретного носителя 11. Данный отказ регистрируется системой контроля (не показана) которая вырабатывает управляющий сигнал и передает его на верхнюю обмотку электромагнита 25 механизма управления во время прохождения соответствующей позиции ротора мимо электромагнита 25. Электромагнит 25 воздействует своим верхним толкателем 26 на ролик 27 соответствующего рычага 19, который поворачивается вокруг оси 18. При этом выступ 21 соответствующего плеча рычага 19 взаи0 имодействует со стержнем 17 и запирает рычаг 14. При нажатии нижнего гибкого отсекателя 6 на плечо рычага 14 он не может повернуться вокруг оси 15 и выступ 16 удерживает нижнюю заготовку 28 в трубчатом накопителе 4. Таким образом, производится выборочный автоматический отказ от питания какой-либо позиции роторного автомата питания. Излищнее натяжение гибкого элемента 6 компенсируется в данном случае его эластичностью. При последующем прохождении этой позиции мнмо электромагнитов 25 срабатывает нижккй электромагнит 25, который своим толкателем 26 возвращает рычаг 19 в исходное положение, при котором нижний отсекатель работает обычным образом. При наладочных работах с машиной слесарь-наладчик .может вручную переключать рычаг 19 нажатием пальца на ролик 27.
Использование данного роторного автомата питания позволит обеспечить надежный выборочный авто.матический отказ от питания заготовками какой-либо загрузочной позиции автомата.
Формула изобретения
I. Роторный автомат питания, содержащий вертикальные трубчатые накопители с пазами, верхний и нижний отсекатели, выполненные в виде замкнутых гибких элементов, охватывающих ротор по дугам окружности, отличающийся тем, что, с целью обеспечения выборочного автоматического отказа от питания загрузочных позиций автомата заготовками, он снабжен механизмом управления, основными и дополнительными двуплечими рычагами, установленными на Н1;:кнем отсекателе, причем каждый основной двуплечий рычаг установлен с возможностью качания в плоскости, проходящей через ось ротора и ось соответствующего этому рыуагу трубчатого накопителя, на одно.м его плече выполнен паз под гибкий элемент, а на другом - выступ, размещенный в пазу накопителя, а каждый дополнительный двуплечий рычаг подпружинен относительно основного, установлен с возможностью качания в плоскости, параллельной плоскости качания соответствующего ему основного рычага, и взаимодействует с плечом основного рычага, имеющим выступ.
Источники информации, принятые во внимание при экспертизе
