Управление работой головки осуществляется шток-траверсой 4, которая совершает возвратно-поступательное движение под действием толкателя 14 манипулятора, и последовательно взаимодействует с роликами 11 барабана 8 и с подпружиненными штифтами 12 гнезд 9.
Механическая головка работает следуюш;им образом.
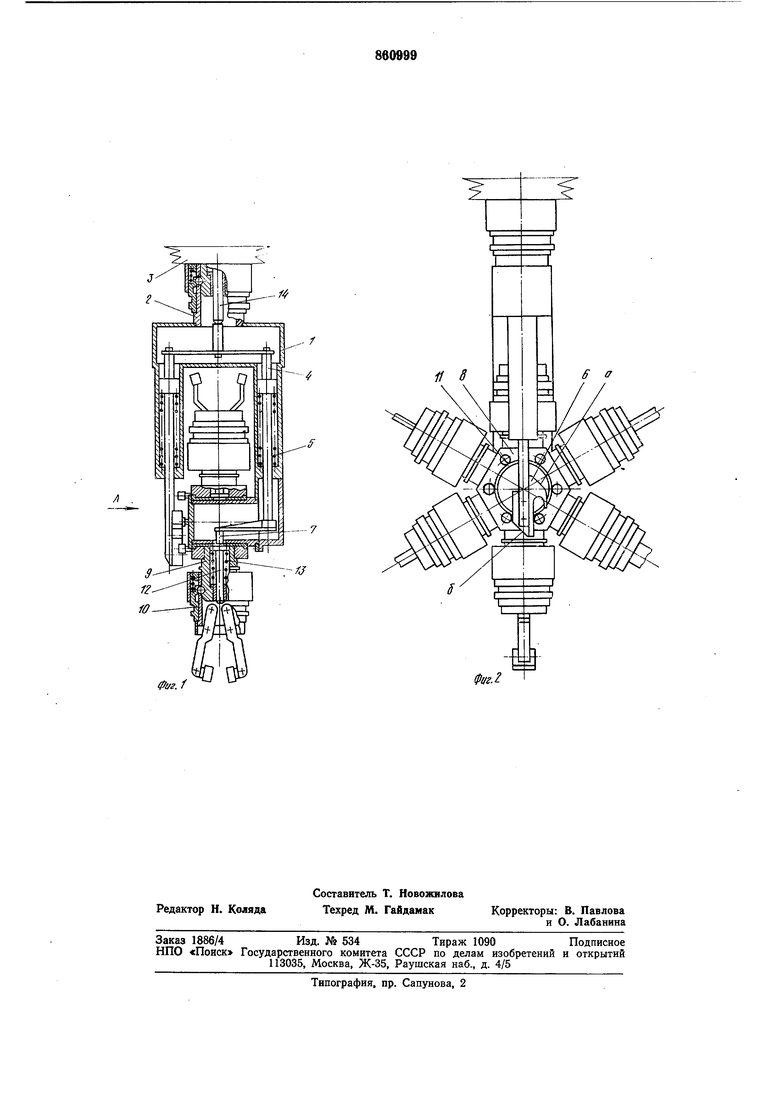
Ход толкателя 14 манипулятора разделяется условно на две зоны, составляюш,ие, например, % полного хода, для поворота и фиксации барабана 8 и /4 для управления работой захватных устройств 10. В зависимости от того, в какой зоне происходит возвратно-поступательное перемеш,ение толкателя 14 манипулятора, производится либо поворот и фиксация барабана 8, либо воздействие на штифт 12 гнезда 9, посредством шток-траверсы 4, для приведения в действие захватного устройства 10, установленного на поворотном барабане 8. Поворот на одну позицию и фиксация барабана 8 осуш;ествляется следуюш,им образом: толкатель 14 манипулятора перемещается в верхнее положение шток-траверса 4 под действием возвратных пружин 5 также перемешается в верхнее положение и укрепленным на ней двухскосным клином 6, скосом а, взаимодействуюшим с одним из ролнков И, поворачивает барабан 8 на половину шага; при перемещении толкателя 14 манипулятора в нижнее положение, вместе со шток-траверсой 4 и клином 6, происходит поворот барабана 8 на вторую половину шага, за счет взаимодействия скоса б клина 6 и одного из роликов 11, а фиксация барабана 8 осуществляется за счет ширины клина 6, который располагается между двумя соседними роликами И.
Управление работой захватного устройства 10 производится при возвратно-поступательном двюкении толкателя 14 манипулятора во второй зоне, не нарушая фиксированного положения барабана 8.
Под действием толкателя 14 шток-траверса 4 пальцем 7 воздействует на штифт 12, установленный в гнезде 9, который, в свою очередь, воздействует на единичный инструмент 10. Обратное движение штифта 12 осуществляется за счет возвратной пружины 13.
Предлагаемое устройство позволит повысить производительность и надежность работы манипулятора.
Формула изобретения
1.Механическая головка к манипулятору, содержащая корпус с гнездом под штангу манипулятора, подпружиненную шток-траверсу, установленную внутри корпуса с возможностью осевого перемещения, и захватное устройство, отличающаяся тем, что, с целью повышения производительности за счет сокращения времени на смену захватных устройств, она снабжена барабаном с гнездами под захватные устройства, установленным в корпусе с возможностью вращения вокруг оси штанги манипулятора, и поворотно-фиксирующим механизмом, захватные устройства связаны через подпружиненные штифты, расположенные в гнездах барабана, со щток-траверсой, а поворотно-фиксирующий механизм выполнен в виде двухскосного клина и взаимодействующих с ним роликов, смонтированных на поверхности барабана, причем шток-траверса установлена с возможностью последовательного взаимодействия с роликами барабана и с подпружиненными штифтами гнезд.
2.Головка по п. 1, отличающаяся тем, что гнезда в барабане под захватные устройства выполнены соответствующими гнезду в корпусе под штангу манипулятора.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 293754, кл. В 66С 1/66, 1968.
/
.- /
Фиг. f
6 ff
11 8
Фаг.
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Загрузочно-разгрузочное устройство | 1987 |
|
SU1563893A1 |
| Карусельная автоматическая формовочная машина Набокина | 1982 |
|
SU1031634A1 |
| Схват манипулятора | 1983 |
|
SU1057273A1 |
| Фрезерный станок | 1984 |
|
SU1210999A1 |
| Скальчатый кондуктор | 1977 |
|
SU763042A1 |
| Устройство для автоматической сборки нецоколеванных миниатюрных ламп накаливания | 1958 |
|
SU121512A1 |
| Устройство для изготовления плоской спиральной пружины | 1973 |
|
SU547259A1 |
| Устройство для крепления тонкостенных изделий | 1985 |
|
SU1255370A1 |
| Сверлильный станок | 1985 |
|
SU1355369A1 |