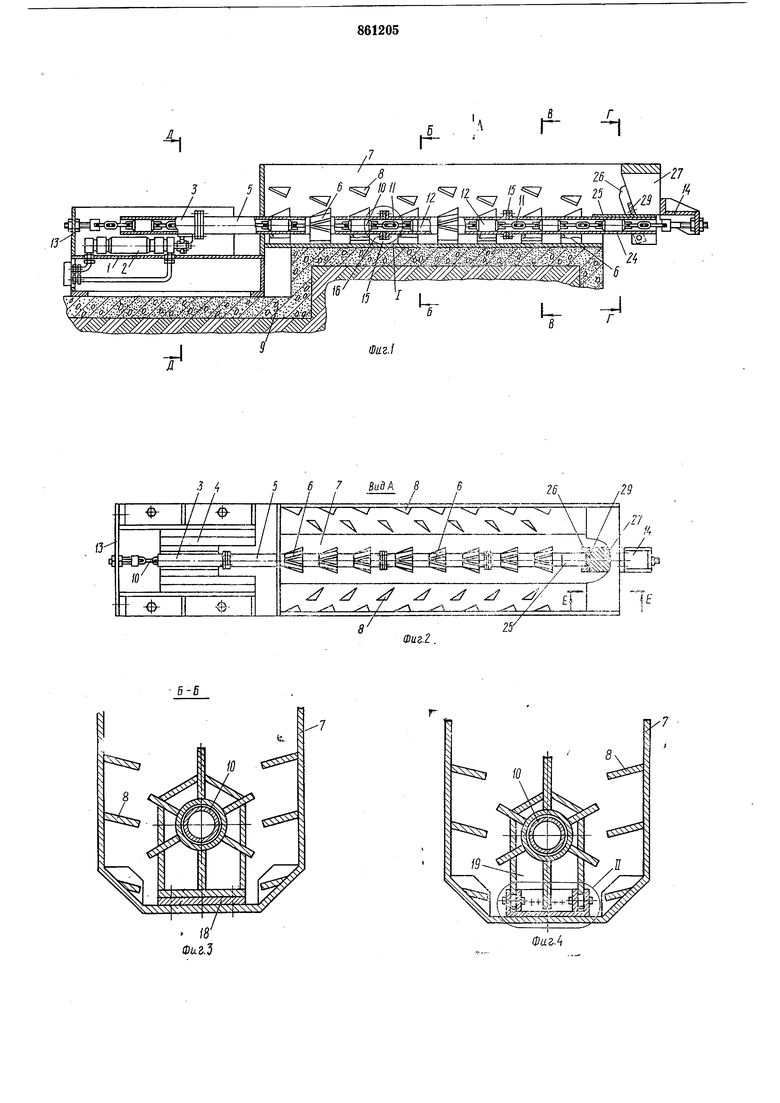
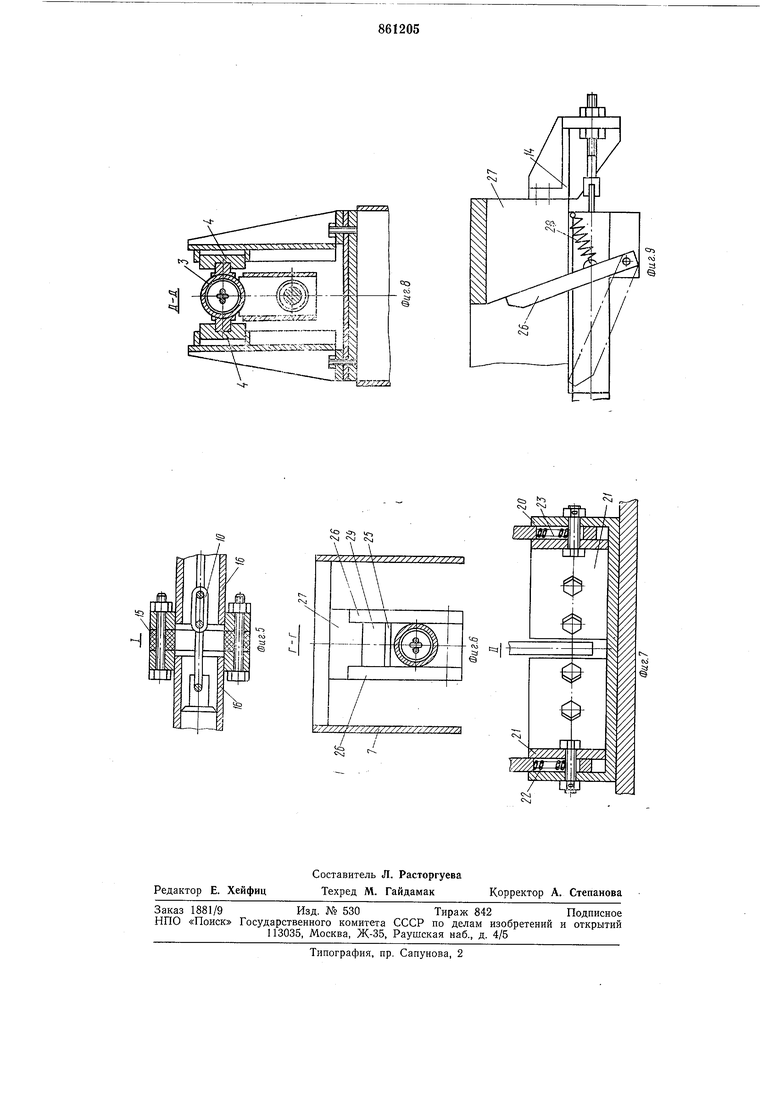
на фиг. 4 - разрез В-В на фиг. 1; на фиг. 5 - узел I на фиг. 1; на фиг. 6 -разрез Г-Г на фиг. 1; на фиг. 7 - узел II на фиг. 4; на фиг. 8 - разрез Д-Д на фиг. 1; на фиг. 9 - разрез Е-Е на фиг. 2. Штанговый конвейер для транспортирования стружки содержит раму 1, на которой установлен привод, выполненный в виде силового цилиндра 2, шарнирно соединенного с кареткой 3, установленной в пря- Ю моугольных пазах 4 и соединенной с приводной штангой 5 с закрепленными на ней ершами 6, установленной в желобе 7 с закрепленными в нем с наклоном в сторону выброса стружки шипами 8. Рама 1 и же- 15 лоб 7 соединены между собой и закреплены на фундаменте 9. Внутри приводной штанги 5 размещена направляющая 10, выполненная в виде последовательно установленных и соединенных цепями 11 вту- 20 лок 12 и прикрепленная к стенке неподвижной рамы 13 и кронштейну желоба 14. Штанга 5 выполнена в виде скрепленных гибких 15 и жестких 16 элементов. Ерши 6 выполнены в виде как опорных 25 элементов 17 для штанги 5 с прикрепленными к ним основаниями 18, так и подвижных относительно штанги 5 элементов 19, содержащих корпус 20, соединенный с планками 21 и подпружиненный пружина- зо ми 22, установленными в пазах 23. ПоследНИИ из жестких элементов 24 щтанги 5 несет неподвижный 25 и подвижные 26 ножи конвейера для резки стружки, последний из которых взаимодействует с упором 27, з5 прикрепленном в желобе 7, ножи 26 возвращаются в исходное положение пружинами 28, укрепленными на жестком элементе 24. На упоре 27 установлен скребок для 40 стружки 29. Неподвижный 25 и подвижные ножи 26 могут быть смонтированы на всех жестких элементах 16 и взаимодействовать с таким , же количеством упоров 27, укрепленных в 45 желобе 7. Конвейер работает следующим образом. При перемещении стружки силовой цилиндр 2 сообщает возвратно-поступательное движение каретке 3 и скрепленной с 50 ней приводной штанге 5, двигающейся по направляющей 10. Ерши 6 при движении штанги 5 в направлении перемещения стружки взаимодействуют с желобом 7 и перемещают стружку (не показана) в сто- gg рону сброса. При этом неподвижный 25 и взаимодействующие с ним и с закрепленным в желобе упором 27 подвижные 26 ножи, перемещаясь вместе со штангой 5, обеспечивают размельчение скапливающей- gQ ся при перемещении стружки. 5 При движении штанги 5 назад стружка задерживается неподвижными шипами 8, а ножи 25 и 26 возвраш,аются в исходное положение. Затем цикл повторяется. ТаКИМ образом, стружка перемещается по желобу 7 до его конца, где сбрасывается в последуюш,ие технологические устройства. Выполнение штанги в виде замкнутого гибкого элемента, охватывающего свою, выполненную также гибкой, направляющую и закрепление названных гибких штанги с ершами и ее направляющей над потоком перемещаемой по желобу стружки позволяет вследствие исключения заклинивания конвейера, уменьшения сопротивления перемещаемой стружки, увеличения иолезного объема желоба, понижения трения между направляющей и внутренней поверхностью штанги, возможности перемещения элементной стружки увеличить надежность и долговечность, снизить энергоемкость с обеспечением универсализации конвейера. Использование неподвижного и взаимодействующих с ним и закрепленным в желобе упором подвижных ножей обеспечивает размельчение скапливающейся при перемещении сливной стружки и также влияет на исключение заклинивания стружки в конвейере. Формула изобретения 1. Штанговый конвейер, включающий неподвижную раму, желоб с односторонне направленными шипами, установленную внутри желоба на направляющей штангу с ершами, и привод возвратно-поступательного движения штанги, отличающийся тем, что, с целью повыщения надежности путем исключения заклинивания при транспортировании стружки, штанга выполнена в виде замкнутых жестких элементов, соединенных между собой посредством замкнутых гибких элементов, а направляющая выполнена в виде последовательно установленных втулок, причем соседние втулки шарнирно соединены между собой посредством гибкой связи, а крайние - с неподвижной рамой и желобом, при этом штанга снабжена неподвижным и подвижными ножами. 2. Конвейер по п. 1, отличающийся тем, что гибкая связь выполнена в виде цепи. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 232821, В 56G 25/10, 1967. 2.Авторское свидетельство СССР 317585, кл. В 65G 25/10, 1969 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Штанговый конвейер | 1980 |
|
SU905168A1 |
| Штанговый конвейер | 1982 |
|
SU1076381A1 |
| Штанговый конвейер для перемещения металлической стружки | 1982 |
|
SU1071540A1 |
| Штанговый конвейер для перемещения металлической стружки | 1986 |
|
SU1370026A1 |
| ШТАНГОВЫЙ КОНВЕЙЕР ДЛЯ ПЕРЕМЕЩЕНИЯ МЕТАЛЛИЧЕСКОЙ СТРУЖКИi2 | 1969 |
|
SU254384A1 |
| Штанговый скребковый конвейер | 1980 |
|
SU948799A1 |
| Штанговый конвейер для транспортирования металлической стружки | 1973 |
|
SU537909A1 |
| Конвейер для транспортирования металлической стружки | 1980 |
|
SU912607A1 |
| Скребковый транспортер | 1980 |
|
SU893744A1 |
| Штанговый конвейер для перемещения металлической стружки | 1983 |
|
SU1164162A1 |
ФигА
J J 77
