(54) МАНИПУЛЯТОР
ИзОбретение отиосится к ле(регрузочным устройствам и может быть использовайо во всех таромышленност И, где производится перемещение изделий на -коввейерных линиях.
Известно устройство для лерелрузки издел ий с иодвесного конвейера «а напольный, включающий поворотный стол, механизм съема, выполненный в виде поворотного рольгавга, вертикальное пе(ремещвние KOTOiporo происходит под действием привода, а .поворот - от упора напольного конвейера 1.
Однако тЗКое устройство сложно и может применяться только для изделий с развитой горизонтальной поверхностью.
Наиболее близким по технической сущности и достигаемому результату является манипулятар, В1Клю1чаюЩий захват, пово|ротный грузонбсущий орга«, механизмы ег,о перемещения, подъема и кантовки в вертнкальяой ЯЛОСКОСТ1И 2.
Манипулятор не обеспечивает беЗ|ударной перегрузки одновременно (Нескольких изделий и ненадежен в работе при кантозке.
Целью изобретвния является Обе спече(ние надежного захвата и безударной пе.реЛруЗКи изделий с одного конвейера на другой.
2
Указанная цель достигается тем, что маяипулятор сна-бжен установленной на грузонесущем органе и связанной с механизмом подъема подвижной платформой,
5 при этом захват установлен внутри платформы и выполнен дву.хчелюстным с каяавка.ми на челю.стях.
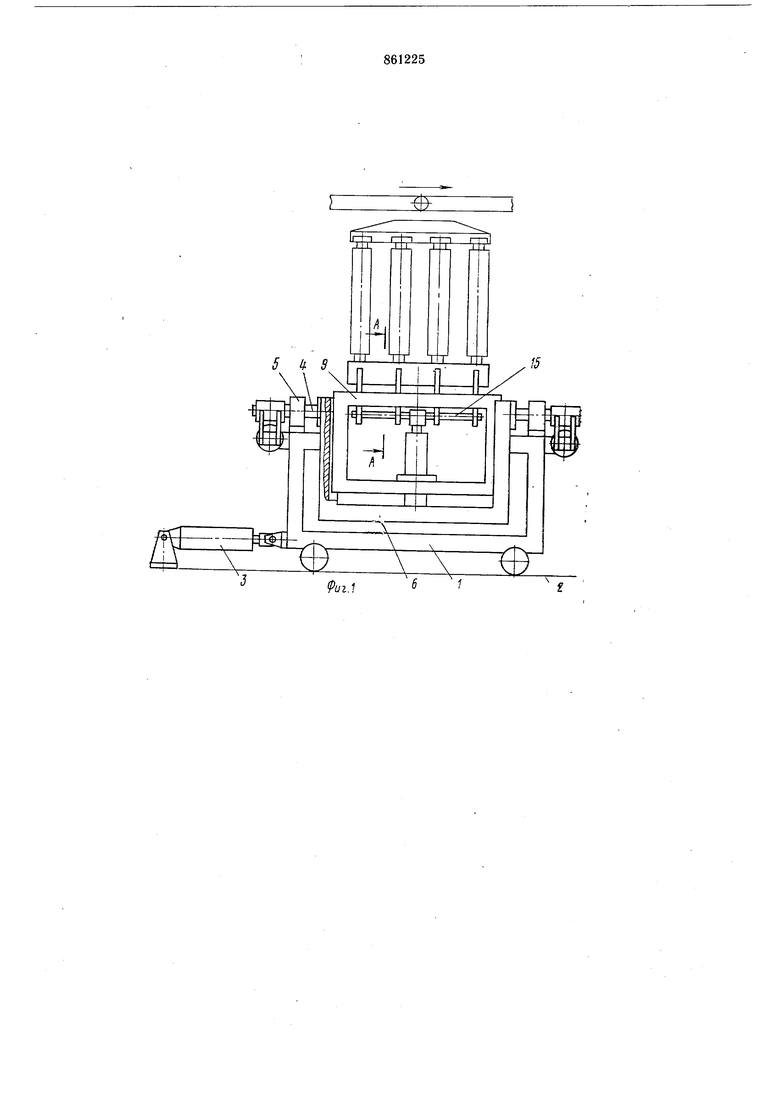
На фиг. 1 изображен описываемый манипулятор в исходном положении; на фиг.
10 2 - то же, вид сбоку, на фиг. 3 - разрез А-А на фиг. 1.
Манипулятор состоит из рамы /, перемещающейся по направляющим 2 с помощью силового цилин цра 3, корпус которого
15 закреплен на фундаменте, а щток - шарн:ирно на раме /. К раме на двух цапфах 4 с опорами 5 шарнир но подвешен поворот- . ный грузонесущий орган 6, который может поворачиваться в вертикальной плоскости
20 с помощью двух -силовых цилиндров 7 корпуса которых шарнирно прикреплены к раме }, а штоки щариирно соединены с .цапЛами 4 через одноплечие рычаги 8.
В направляющих пазах поворотного гру25 зонесущего органа 6 установлена подвижная платформа 9, перемещаемая силовым цилиндром 10, «орпус iKOTOiporo закреплел на поворотном грз зонесущем органе .о, а шток - на подвижной платформе 9. Внут30 ри платформы установлен двухчелюсъный
аахват 11 с «анавкамл 12 «а челюстях, выполненными по форме изделий 13, приводи1мый в действие силовым цилиндром 14, Корпус цилиндра 14 жестко заюреплен на подвижной илатформе 9, а его шток -шарнирно на оси 15.
Манилулятор устанавливается в зо;не перегрузки изделий 13 с одного .конвейера 16 на другой конвейер 17, транопортируе.мых подвеской 18.
Работает манипулятор следующим обipaaoM.
В исходном положении поворотный грузонесущий орган 6 расположен вертИкальйо на цапфах 4. Подвижная платформа 9 с разведенным захватом 1.1 находится в крайнем нижнем положении под конвейером 16. При входе подвести 18 с подвешенными на ней изделиями 13 в зону действия захвата 11 рама 1 манипулятора перемещается силовым цилиндром 3 в наПравлении движения конвейера 16 по нашравляющим 2.
При движении рамы 1 осуществляется захват изделий 13 захватом 11, подъем подвижной платформы 9 силовым цилиндipOM 10, при котором происходит съем изделий 13 с подвески 18, поворот трузонесущего органа 6 в ,кальпой плоскости силовым цилиндром 7 с по-мощью одноплечих рычагов 5 и цапф 4.
По окончании поворота -грузонесущего органа 6 производится безударная упорядоченная загрузка конвейера 17 изделиями 13, кото1рые при кантовке удерживаются захватом.
После перегрузки захват // освобождает изделия 13, подвижная платформа 9, рама / и поворотный грузонесущий оргаи 5 поочередно под действием силовых цилиндроа 10, Зк 7 соответственно возвращаются в исходные положения. Итак, цикл работы повторяется для .каждой последующей подоески с изделиями.
Положительный эффект предлагаемого маиипулятора состоит в том, что обеспечивается перелрузка различных по форме изделий. Применение манипулятора позво.яяет полностью автоматизировать процесс парегрузми изделий с одного конвейера на другой, и наоборот.
Формула изобретения
Манипулятор, включающий захват, поворотный грузонесущий орган, .механизмы его перемещения, подъема и кантовки iB вертикальной плоскости, отличающийс я тем, что, с целью обеапечевия надежного захвата и безударной перегрузки изделий, он снабжен установленной на грузонесущем органе и связанной с 1механиз1мом подъема подвижной платформой, ври этом захват установлен илапформы и выполнен двухчелюстным с канавка1ми на челюстях.
Источники информации, гар1инятые во внимание при экспертизе:
1.Авторское свидетельство СССР № 619423, кл. В 65 G 47/56, 1976.
2.Авторское свидетельство СССР № 519373, кл. -В 65 G 47/36, 1973 (прототил).
i S
ц J5
ТУТ т
itJU/
ич 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для навешивания и съемаиздЕлий | 1979 |
|
SU806566A1 |
| Устройство для загрузки наверточных станков | 1985 |
|
SU1292982A1 |
| Устройство для съема изделий с конвейера | 1985 |
|
SU1316953A1 |
| Кантователь | 1973 |
|
SU562474A1 |
| Устройство для перемещения и передачи подвесок с грузами | 1983 |
|
SU1133194A1 |
| Устройство для съема изделий с подвесного конвейера | 1988 |
|
SU1539147A1 |
| Конвейер для межоперационного перемещения изделий | 1981 |
|
SU994373A1 |
| Кран-манипулятор | 2019 |
|
RU2725367C1 |
| Роликовый конвейер | 1986 |
|
SU1413046A1 |
| Кран-манипулятор | 2019 |
|
RU2722762C1 |

.
Ч V
